1
Известен способ управления многоприводным вынесеппым механизмом подачи горной машины, оспованный на регулировании пагрузки привода рабочей ветви тягового органа и регулировании натяжения холостой ветви тягового органа, выполпепного в виде цепи или каната.
Предлагаемый способ отличается от известного тем, что замеряют нагрузку привода рабочей ветви и пропорционально получеппой величине регулируют нагрузку привода холостой ветви, причем минимальную пагрузку привода холостой ветви поддерживают пе пиже минимально допустимой.
Это позволяет повысить качество управления.
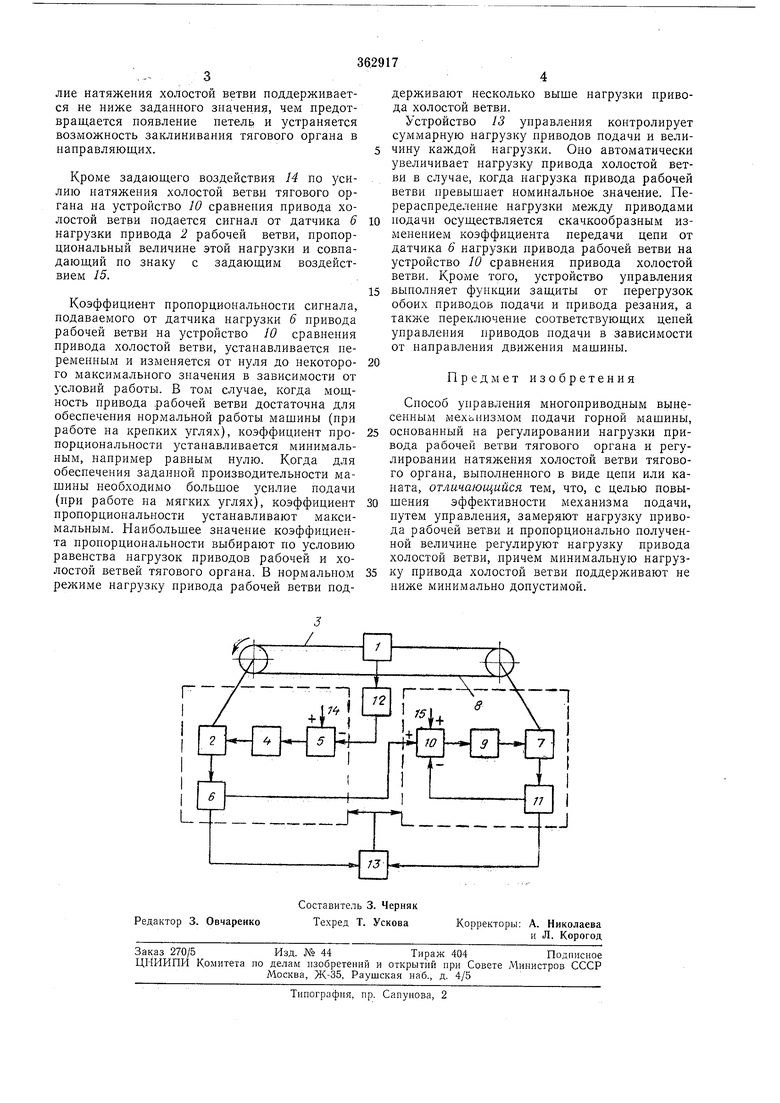
Па чертеже приведено устройство, реализующее предлагаемый способ.
Выемочная машина 1 приводится в движение механизмом подачи, состоящим из привода 2, рабочей ветви 3, тягового органа (с регулятором 4 нагрузки, устройством 5 сравнения и датчиком 6 нагрузки), привода 7 холостой ветви 8 (с регулятором 9, устройством 10 сравнения и датчиком 11 нагрузки), датчика нагрузки привода 12 резания, устройства 13 управления. Па устройства 5 и 10 сравнения подаются соответственно задающие воздействия 14 и 15.
Задающее воздействие 14 привода 2 рабочей ветви устанавливается по условию обеспечения номинальной нагрузки привода резания. Задание сравнивается с выходным сигналом датчика нагрузки привода 12 резания. Сигнал рассогласования поступает на вход регулятора 4 нагрузки (скорости подачи) привода 2 рабочей ветви 3 тягового органа. В зависимости от знака и величины сигнала
рассогласования происходит увеличение или уменьшение скорости вращения привода рабочей ветви и соответственно нагрузки привода резания. Задающее воздействие привода 7 холостой
ветви 8 тягового органа устанавливается по условию обеспечения минимально необходимого натял ения холостой ветви, при котором исключается возможность ее заклинивания (порядка двух-трех тонн). Задание сравнивается с сигналом, поступающим от датчика // нагрузки привода 7 холостой ветви 8. Сигнал рассогласования поступает на вход регулятора 9 нагрузки (скорости подачи) привода холостой ветви. При увеличении
(уменьшении) нагрузки привода холостой ветви по сравнению с заданным значением на выходе регулятора 9 появляется сигнал, ликвидирующий несоответствие между заданным и фактическим значением нагрузки (натяжением холостой ветви). Таким образом, уси
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления многоприводным механизмом подачи горной машины | 1990 |
|
SU1731946A1 |
| СПОСОБ УПРАВЛЕНИЯ ГОРНОЙ лиШИНОЙ | 1972 |
|
SU347744A1 |
| Способ управления вынесенной системой подачи очистного комбайна | 1989 |
|
SU1671854A2 |
| Устройство управления вынесенной системой подачи очистного комбайна | 1983 |
|
SU1134711A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2011 |
|
RU2454335C1 |
| Устройство автоматического управления забойной машиной и конвейером | 2022 |
|
RU2814926C1 |
| Способ управления движением ковша драглайна и устройство для его осуществления | 1982 |
|
SU1084390A1 |
| Способ автоматического управления натяжением тягового органа двухприводного скребкового конвейера | 2022 |
|
RU2801914C1 |
| Регулируемый электропривод угольного комбайна | 1989 |
|
SU1795096A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРОПЕРЕДАЧИ ТЕПЛОВОЗОВ | 2011 |
|
RU2476332C1 |
