1
Изобретение относлтся к области автоматического управления н предназначено для пснользовапия в системах автоматического уп|)авлення перемещен ем рабочих органов продольно-обрабатывающих станков.
Известшя устройства для автоматического управления дл}1ной хода возвратно-поступательного неремещення рабочего органа, содсржаш,11е сельснн-датчШС положения рабочего органа, соединенный с двумя сельсннами-нрнемнпка.л,и1 - задатчнкамп координат точек реверса, однн выходы которых подключены к соответствующн.м фазочувствнтельным усилителям.
Недостатком этнх устройств является низкая точность реверсирования и малый диапазон изменения длины хода рабочего оргауа.
Отлнчие описываемого устройства заключается в том, что в качестве фазочувствитель1 Ы.х усилителе 11С1 ользовань по схеме с общим эмиттером и общим сонротивлением обратной связи, подключенным к другим выходам сельсинов-нриемнпков.
Это нозволяет повысить точность реверсирования н расширить диапазон изменения длины хода.
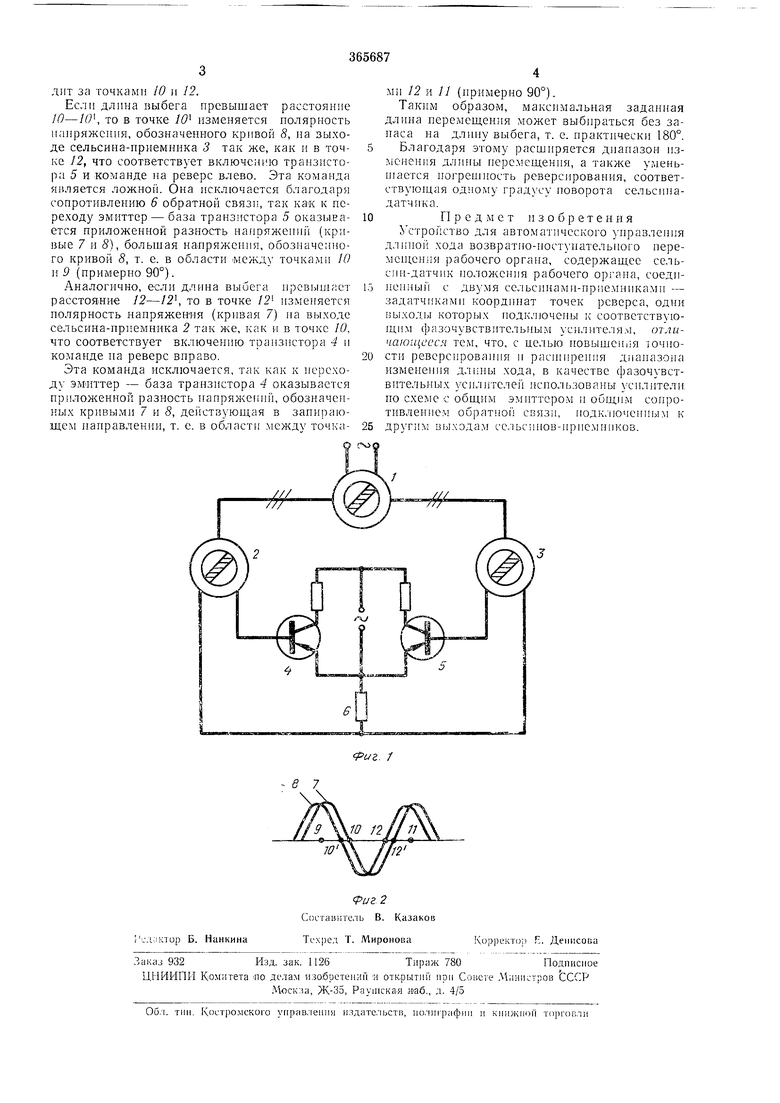
На фиг. I зображеиа нр 1нцнннальная схема опнсываемого устройства; па фиг. 2 -крнвые измене(П1я выходпых сигналов задатчиков.
J.cTpoiicTBO содержит сел}зС н-д;1тч1 к /, сельснны-нрне.мник (задатч:-1кп) 2, 3. транзисторы 4, 5 фазочувствнтельиых усилителей, соиротнвление 6 обратной связи; на ф1н- 2: 7-кривая В.1хэд1101-о с н-н;1л; .чна 2 8 - выходного сиги; ; ;; сельсина ,;; .9, 10, 11, 12- рабоч1 е точки выходных задатЧ КОВ.
Устройство работает следующ 1м образол.
Длина хода рабочего органа устанавлнвается новоротом роторов сел)Сннов-задатчиков точек реверсов, работающнх в трансформаторном режиме. При двнженш рабочего органа нанряжеи 1е на выходе оельс; нов-ир 1е.мииков изменяется. При ирохожденпн через согласованное положение (точка 10 включается транзистор 4. ,-м:ется напряжеи1 е на его нагрузке и выдается команда на реверс . Рабочий орган начинает двнже} ие внрапо. Hpir проходсдопп через согласова.нное 1 оложение (точка 12} включается транзистор .5, появляется напряжение па нагрузке н выдает S кома; да на реверс влево. Начшич тся движение влево.
Расстояние .между точками 10 н 12 определяет длину перемещения н зависит эт взаимного иоложення роторов сельснноз-задатчикоп.
-Момент iз e;:eпllя направлеи 1я движег.ия. о ределяющ1н 1 , от скорост 1еремен1е11ия рабочего органа н нронсхо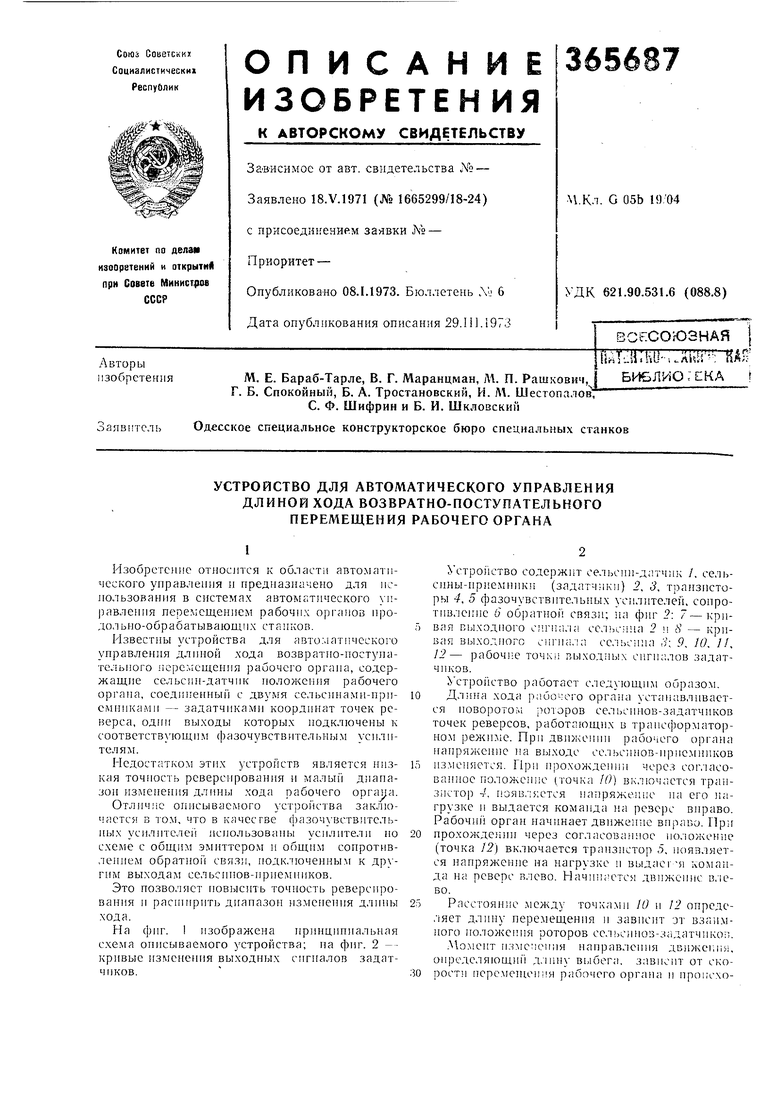
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ПОДВИЖНОГО УЗЛА СТАНКА | 2007 |
|
RU2339498C2 |
| ВСЕСОЮЗНАЯАвторы.'L~^''ii'--^»'™-^°''*изобретения М. Е. Бараб-Тарле, В. Г. Маранцман, М. П. Рашкович, Г. Б. СпокоиныиГГ Б. А. Тростановский, И. М. Шестопалов, С. Ф. Шифрин и Б. И. Шкловский | 1973 |
|
SU377733A1 |
| УСТРОЙСТВО ГРУППОВОГО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ НА ШИНАХ ЭЛЕКТРОСТАНЦИИВСЕСОЮЗНАЯ | 1971 |
|
SU316170A1 |
| Система управления привода стола продольно-строгального станка | 1973 |
|
SU446384A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ МАГНИТНОГО КУРСА | 1970 |
|
SU271029A1 |
| ПРОГРАММНОЕ УСТРОЙСТВО ДЛЯ РЕГУЛЯТОРОВ СКОРОСТИ с ИМПУЛЬСНЫМИ ДАТЧИКАМИ СКОРОСТИ | 1971 |
|
SU296381A1 |
| Устройство для управления перемещением рабочих органов станка | 1976 |
|
SU593189A1 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ ПРОЦЕССА ДРОБЛЕНИЯ В ДВУХРОТОРНОЙ ДРОБИЛКЕ | 1967 |
|
SU196155A1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛИНОЙ ХОДА ГИДРОФИЦИРОВАННЫХ УЗЛОВ СТАНКОВШШйО-Т?ХН8^С|ВСЕСОЮЗНА? | 1972 |
|
SU350634A1 |
| Устройство для дистанционного задания величины хода узлов станка | 1984 |
|
SU1228078A1 |
