1
Изобретение относится к области автоматизации станков.
Известны устройства для управления перемещением стола продольно-строгального станка, содержащие сельсин-датчик положения стола, сельсин-задатчик координаты реверса стола и бесконтактную схему управления, вырабатывающую на выходе эталонное напряжение для управления приводом стола.
Однако для производительной обработки на продольно-строгальных станках ряда деталей, например остряков железнодорожных стрелочных переводов, необходимо изменять координаты реверса стола после каждого двойного (рабочего и обратного) хода стола по определенномузакону.
Известные устройства не могут обеспечить автоматического изменения координат реверса после каждого двойного хода стола.
Описываемая система позволяет автоматически по заданному закону изменять координаты реверса стола в процессе работы за счет изменения после каждого двойного хода положения ротора одного из сельсинов-задатчиков координат реверса стола. Для достижения этого предлагаемая система снабжена сельсином-задатчиком приращений хода стола, поворотом статора которого задается необходимая величина приращения, а ротор его через редуктор связан с ротором сельсина-задатчика координаты реверса стола, причем статор сельсина-задатчика приращений электрически соединен со статором сельсина-датчика приращений, ротор которого- через редуктор соединен с ротором сельсина-датчика положения стола.
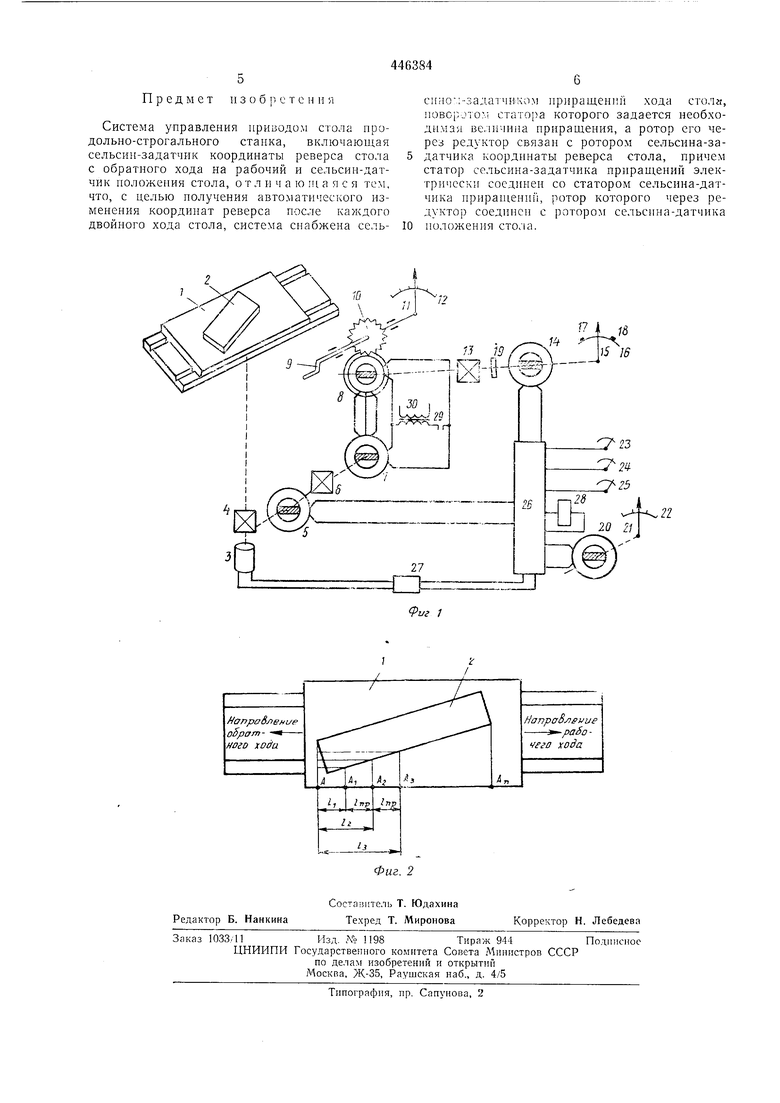
На фиг. 1 приведена блок-схема предлагаемого устройства; на фиг. 2 - диаграмма работы стола продольно-строгального станка
при косом строгании с применением предлагаемого устройства.
Стол 1 станка с установленной на нем обрабатываемой деталью 2 приводится в движение двигателем 3 через редуктор 4. С двигателем через редуктор соединен также ротор сельсина-датчика 5 положения стола. С сельсином 5 через промежуточный редуктор 6 соединен ротор сельсина-датчика приращений 7. К сельсину 7 .подключен сельсин 8, который
установлен на пульте управления станка и предназначен для задания необходимого изменения координаты реверса стола после каждого двойного хода, что равносильно приращению длины хода стола за каждый двойной ход. Сельсины 7 и 8 работают в индикаторном режиме. Статор сельсина 8 при помощи рукоятки 9 и зубчатой шестерни 10 можно поворачивать на необходимый угол, задавая тем самым необходимую величину приращения хода стола, отсчитываемую при помощи стрелки 11 по шкале 12, градуированной в метрах.
С ротором сельсина 8 через промежуточный редуктор 13 соединен ротор сельсина-задатчика 14, который установлен на тульте унравления станка и задает координату реверса стола с обратного хода на рабочий, отсчитываемую при помощи стрелки 15 но шкале 16, градуированной в метрах. Поворот стрелки 15 может быть ограничен подвижными упорами 17 и 18.
Ротор сельсина 14 лодтормаживается фрикционным тормозом 19. Сельсин-задатчик 20 установлен на пульте управления станка и предназначен для задания координаты реверса стола с рабочего хода на обратный, которая отсчитывается при помощи стрелки 21 но щкале 22, граудировапной в метрах.
На пульте управления станка установлены задатчик 23 скорости рабочего хода, задатчик 24 скорости обратного хода и задатчик ускорения 25.
Сельсин-датчик 5 положения стола, сельсины-задатчики 14 и 20 координат реверса, задатчики скорости рабочего 23 и обратного 24 хода и ускорения 25 подключены на вход бесконтактного блока управления 26. К выходу блока 26 подключен преобразователь 27, питающий двигатель 3 привода стола, и реле 28. Блок управления выдает реверсивное напряжение для управления преобразователем 27, который управляет двигателем 3, а также в конце каждого обратного хода в момент реверса на обратный ход включает реле 28. Реле 28 своими контактами 29 подключает статоры сельсинов 7 и 8 к трансформатору 30.
Полной длине хода стола соответствует поворот ротора сельсина-датчика 5 на 165°, на такой же угол могут поворачиваться роторы сельсинов 14 и 20.
Редуктор 6 необходимо для увеличения угла поворота сельсина 7 по отношению к сельсину 5 для более точного задания малых приращений длин хода стола. Передаточное число редуктора 13 отличается от передаточного числа редуктора 6 только на величину, необходимую для компенсации угловых погрешностей сельсинов 7 и 8.
При косом строгании обрабатываемой детали (фиг. 2) длина 1-го прохода стола составляет участок /1 между точками Л-Ль длина 2-го прохода стола составляет участок /2 между точками Л-А, где 1г, на величину приращения /пр, длина 3-го прохода стола составляет участок /з между точками Л-Лз и больше участка /а на величину /пр и т. д.
Таким образом, длина хода стола увеличивается после каждого двойного хода на величину приращения /пр за счет смещения на эту величину координаты реверса стола с обратного хода на рабочий.
Предлагаемое устройство работает следующим образом.
Сельсин 20 задает коориднату реверса стола с рабочего хода на обратный - точка Л на фиг. 2; подвижный упор 17 на шкале 16 ставится в положение, соответствующее координате реверсирования стола с обратного хода на рабочий при первом проходе - точка Л, и к этому упору подводится стрелка 15, поворачивающая ротор сельсина 14.
Подвижный упор 18 ставится в положение, соответствующее координате Л„ - максимальной длине хода стола.
Рукояткой 9 задается требуемая величина приращения длины хода стола, отсчитываемая по щкале 12 и поворачивается статор сельсина 8, задавая рассогласование относительно сельсина 7. При движении стола, когда фазы сельсинов 5 и 20 совпадают, происходит реверсирование с рабочего хода на обратный IB точке Л. В коице обратного хода, когда совнадут фазы сельсинов 5 и 14, нроисходит реверс стола с обратного хода на рабочий в точке Л1 и одновременно включится реле 28, подключая контактом 29 обмотки сельсинов
7 и 8 ктрансформатору 30. Так как ротор сельсина 7 связан с механизмом привода, а статоры сельсинов 7 и 8 неподвижны, то начинает вращаться ротор сельсина 8, обрабатывая угол, заданный рукояткой 9. Ротор сельсина 8 при вращении новорачивает ротор сельсина 14 координаты реверса с обратного хода на рабочий до ноложения, соответствующего точке АЧ. Через некоторое время реле
28отключается, его контакт 29 размыкается и ротор сельсина 14 фиксируется в новом положении тормозом 19. Стрелка 15 при этом отойдет от упора 17. При втором переходе в конце обратного хода реверс стола происходит при совпадении фаз сельсинов 5 и 14 в
точке A-i, то есть ход стола увеличится на величину /пр. Так как ротор сельсина-датчика 7 вращается одновременно с движением стола, то в момент реверса между сельсинами 7 и 8 будет снова рассогласование, равное /пр
при включении реле 28 и замыкании контакта
29ротор сельсина 8 снова отрабатывает это рассогласование, повернув ротор сельсиназадатчика 14 в новое положение, соответствующее точке Лз. При этом стрелка 15 еще
дальше отойдет от упора 17.
Дальпейщая работа будет происходить при наращении длины хода стола После каждого двойного хода на величину 1щ, до тех пор,
пока стрелка 15 не дойдет до упора 18, что соответствует координате An - максимальной длине хода стола.
Если упоры 17 и 18 свести вместе и этим зафиксировать в определенном положении
стрелку 15, то устройство задания приращения хода стола не будет работать и реверсирование стола будет происходить с постоянной координатой реверса с обратного хода на рабочий ход, заданной сельсином 14 и следовательно, с постоянной длиной строгания.
Предмет и з о б n с т о н и я
Система управления приводом стола продольно-строгального стапка, включающая сельсип-задатчик координаты реверса стола с обратного хода на рабочий и сельсин-датчик положения стола, от л и чающаяся тем, что, с целью получения автоматического изменения координат реверса после каждого двойного хода стола, система снабжена сельспно-:-за:1,атчиком прнраш,ений хода столгг, поворото:. статора которого задается необходимая величина приращения, а ротор его через редуктор связан с ротором сельсина-задатчика координаты реверса стола, причем статор сельсина-задатчика прирап.1ений электрпческп соединен со статором сельсина-датчика npnpanieHHii, ротор которого через редуктор соедипен с ротором сельсина-датчика положения стола.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления перемещением стола продольно-обрабатывающего станка | 1983 |
|
SU1077753A1 |
| СИСТЕМА ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПРИВОДОМ ПЕРЕМЕЩЕНИЯ СТРОГАЛЬНОГО СТАНКА | 1971 |
|
SU312673A1 |
| Продольно-обрабатывающий станок | 1972 |
|
SU467812A1 |
| Устройство для дистанционного задания величины хода узлов станка | 1984 |
|
SU1228078A1 |
| Устройство для установки величиныХОдА СТОлА CTAHKA | 1979 |
|
SU812543A1 |
| Механизм задания длины хода рабочего органа станка | 1977 |
|
SU651935A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ПОДВИЖНОГО УЗЛА СТАНКА | 2007 |
|
RU2339498C2 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ РАБОЧИХ ОРГАНОВ ПРОДОЛЬНО- ОБРАБАТЫВАЮЩИХ СТАНКОВ | 1966 |
|
SU180682A1 |
| Устройство для автоматического управления механизмами машин-орудий | 1937 |
|
SU55814A1 |
| Устройство для управления электроприводом подачи суппорта продольно-строгального станка | 1954 |
|
SU100145A2 |
.Т 19 - Л j . 4li ЧГ ,. 24Z5
