1
Изобретение относится к автоматике и может быть использовано в металлорежущих станках с числовым программным управлением.
Известно устройство для управления перемещением рабочих органов станка, содержащее асинхронный двигатель, сельсины-приемники грубого точного отсчета, сельсины-датчики и усилитель 1. Низкая точность известного устройства вызывается тем, что ошибка в установившемся режиме складывается из ошибок управляющей и исполнительной схем. Иаиболее близким к изобретению техническим решением является устройство для управления перемещением рабочих органов станка, содержашее датчики положения и последовательно соединенные сельсин-датчик, сельсин-приемник и блок задания команд 2. Это известное устройство характеризуется низкой точностью реверса при большой длине хода рабочего органа, а также наличием ручной настройки точек реверса но краям детали и отдельных сельсинов-ириемников правой и левой точек реверса.
Целью изобретения является повышение точности. В описываемом устройстве это достигается тем, что оно содержит блок торможения, усилитель и серводвигатель, обмотки которого подключены через блок торможения к датчикам положения и через усилитель - к
сельсину-приемнику, ротор которого механически связан с ротором серводвигателя.
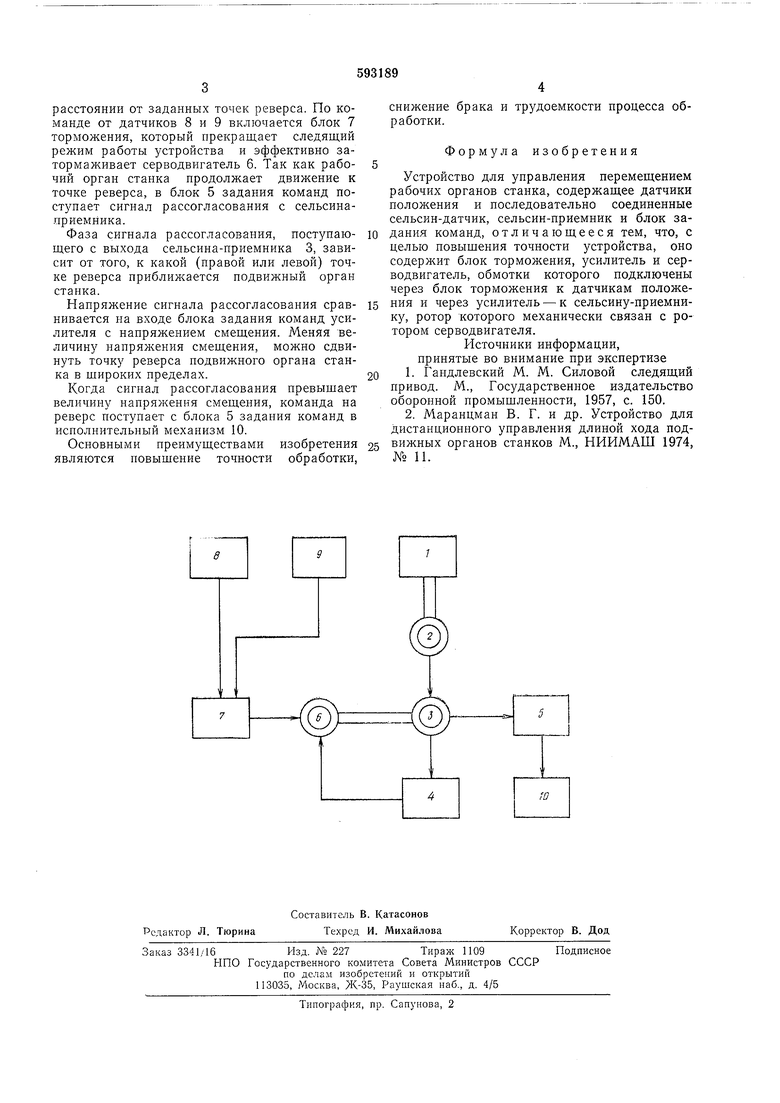
На чертеже представлена блок-схема они сываемого устройства.
Оно содержит рабочий орган 1 станка, механически связанный с ним сельсин-датчик 2 сельсин-приемник 3, электрически соединей ный с сельсином-датчиком 2. Сельсин-прием ник 3 подключен к усилителю 4 и блоку 5 задания команд. Усилитель 4 соединен с серводвигателем 6. Серводвигатель снабжен блоком 7 торможения. Датчики 8 и 9 положения подключены к блоку 7. Выход блока 5 соединен с исполнительным механизмом 10. Серводвигатель 6 механически связан с сельсином-приемником 3.
Сельсин-датчик 2, сельсин-приемник 3, усилитель 4 и серводвигатель 6 образуют следящую систему. Во время рабочего хода рабочего органа станка устройство находится в режиме слежеиия, и в блок 5 задания команд поступает нулевой сигнал с выхода сельсинаприемника 3. Датчики 8 и 9 положения, отстоящие от заданных точек реверса на величину максимального тормозного пути рабочего органа станка, срабатывают только после прохождения мимо них края детали.
Таким образом, независимо от обрабатываемой длины детали, команда с датчиков 8 и 9 поступает в блок 7 всегда на одном и том лее
расстоянии от заданиых точек реверса. По комаиде от датчиков 8 и 9 включается блок 7 торможеиия, который прекращает следящий режим работы устройства и эффективно затормаживает серводвигатель 6. Так как рабочий орган станка иродолжает движение к точке реверса, в блок 5 задания команд поступает сигнал рассогласования с сельсинаприемника.
Фаза сигнала рассогласования, поступающего с выхода сельсина-ириемника 3, зависит от того, к какой (правой или левой) точке реверса приближается подвижный орган станка.
Напряжение сигнала рассогласования сравнивается иа входе блока задания команд усилителя с напряжением смещения. Меняя величину напряжения смещения, можно сдвинуть точку реверса иодвижного органа станка в щироких пределах.
Когда сигнал рассогласования превыщает величину напряжения смещения, команда на реверс поступает с блока 5 задания команд в исполнительный механизм 10.
Основными преимуществами изобретения являются иовыщеиие точности обработки,
снижение брака и трудоемкости процесса обработки.
Формула изобретения
Устройство для управления перемещением рабочих органов станка, содержащее датчики положения и последовательно соединенные сельсин-датчик, сельсин-приемник и блок задания команд, отличающееся тем, что, с целью повыщения точности устройства, оно содержит блок торможения, усилитель и серводвигатель, обмотки которого подключены через блок торможения к датчикам положения и через усилитель - к сельсину-приемнику, ротор которого механически связан с ротором серводвигателя.
Источники информации, принятые во внимание при экспертизе
1.Гапдлевский М. М. Силовой следящий привод. М., Государственное издательство оборонной промыщленности, 1957, с. 150.
2.Маранцман В. Г. и др. Устройство для дистанционного управления длиной хода подвижных органов станков М., НИИМАШ 1974, № И.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОТСЧЕТА ПЕРЕМЕЩЕНИЙ | 1972 |
|
SU358103A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМе-с?;сою:^;^*^- • bATEM^a^aiiH^i^- Щ ""^ &и&лиот^и.л^^ | 1973 |
|
SU374161A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1971 |
|
SU307897A1 |
| ДВУХОТСЧЕТНАЯ СИСТЕМА ПРОГРАММНОЙ НАСТРОЙКИ ДЕРЕВООБРАБАТЫВАЮЩИХ СТАНКОВ | 1965 |
|
SU222497A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1966 |
|
SU185484A1 |
| Следящая система | 1981 |
|
SU999016A1 |
| Устройство для программного управления положением объекта | 1987 |
|
SU1520479A1 |
| Устройство для программного управления перемещением рабочего органа | 1977 |
|
SU704776A1 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАЗДЕЛЬНЫМИГИДРОПРИВОДАМИ МЕХАНИЗМА ПЕРЕДВИЖЕНИЯМОСТОВОГО КРАНА | 1971 |
|
SU424802A1 |
