1
Изобретение может быть использоваио при автоматизации троизводственных процессов с вводом управляющей информации при помощи магнитной ленты, налример, в системах программного управления металлорежущими станками.
Известен способ коррекции программы в системах программного управления от магнитной ленты путем суммирования считанных при прямом ходе .магнитной ленты сигнала исходной программы и корректирующего сигнала.
Одна1ко известный способ коррекции программ позволяет уменьшить лищь низкочастотные составляющие ошибки .воспроизведения при одновременном увеличении составляющих, частота которых превышает критическую. В результате суммарная ошибка на выходе системы управления уменьшается лишь при первых нескольких циклах ашррекции, после чего она начинает увеличиваться за счет роста высокочастотных шумов. Таким образом, при этом способе формирования корректирующего сигнала процесс коррекции оказывается расходящимся.
Причина этого заключается в том, что частотные составляющие (тарманики) ошибки текущего воспроизведения, подаваемые на вход системы управления для компенсации ошибки последующего воспроизведения программы.
проходят через систему с фазовым запаздыванием, которое увеличивается с повышением частоты,
Предлагаемый способ отличается те.м, что корректирующий сигнал формируют при обратном .ходе магнитной ленты ка-к сумму корректирующего сигнала предыдущего воспроизведения и выходного снгнала снстемы при подаче на ее вход сигнала ошибки предыдущего воспроизведения.
Это позволяет обеспечить сходимость процесса коррекции в неограниченном диапазоне частот сигнала ошибки.
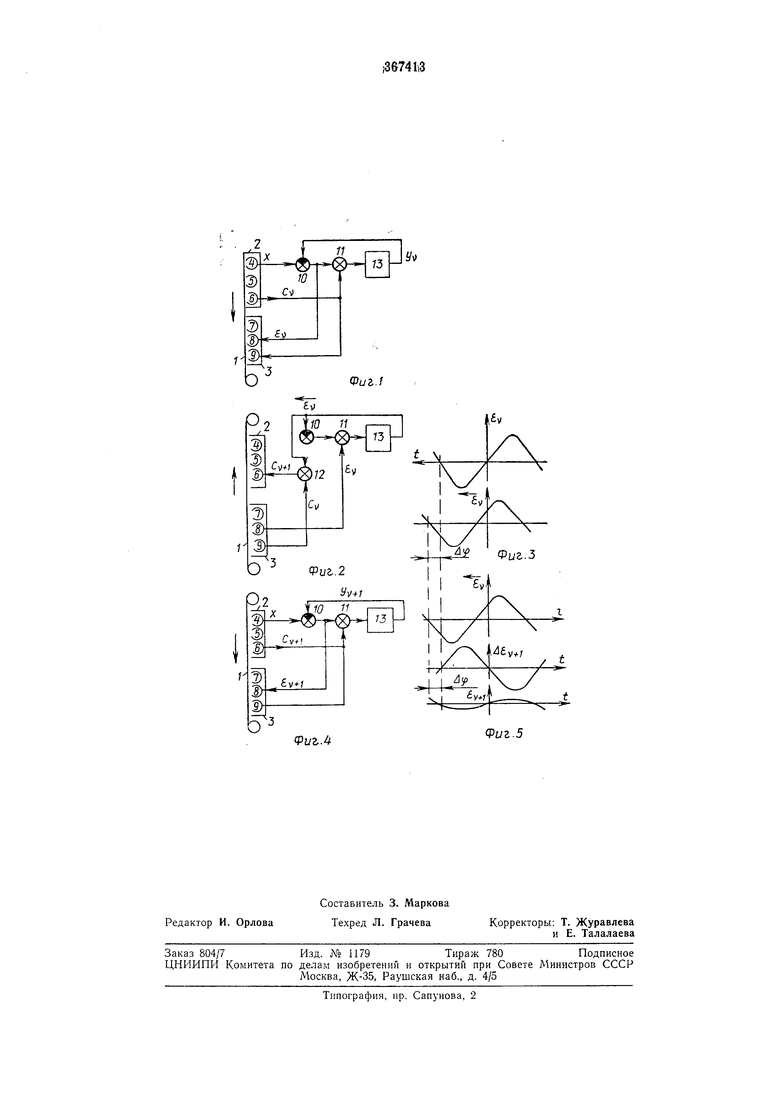
На фиг. 1 приведен возможный вариант блок-схемы системы программного управления с коррекцией программы по предлагаемому способу в режиме v-ro воспроизведения программы; на фнг. 2 приведена блок-схема
этой же системы в режиме проигрывания ошибки предыдущего воспроизведения в обратном иаправленин; на фит. 3 - временные диаграммы входного и выходного сигналов следящего привода; на фиг. 4 приведена блоксхема в режиме {v + l)ro воопроизведения программы, на фиг. 5 - соответствующие временные диаграммы .входного и .выходного сигналов следящего привода. Система содержит магнитную ленту /сдвумя блоками 2 и 3 магнитных головок.
3
Блоки магнитных головок работают поочередно в режиме записи и воапро-изведения; каждый блок состоит из трех головок 4, 5, 6 и 7, 5, Р соответственно. Для пар-- головок 5, 8 и 6, 9 ИОпользуют по одной дорожке магнитной ленты.
Система содержит также элементы 10, 11 и 12 суммирования, следящий прлвод 13 (зачерненный сектор элемента 10 означает, что поступающий на этот вход сигнал суммируется с обратным знаком).
В системе используются следующие управляющие и Корректирующие сигналы:
X - основная (исходная) программа;
У; - ВЫХОДНОЙ сигнал системы при V-M воспроизведении программы;
Cv - корректирующий сигнал v-ro воспроизведения;
8v - ощибка V-TO воспроизведения.
В режиме регистрации ошибки система управления функционирует следующим образом (фиг. 1).
Лентопротяж1ный механизм включается в (Прямом направлении. На вход следующего привода 13 поступают основная программа х, считываемая магнитной головкой 4, и корректируюЩИЙ сигнал Cv , считы1вавмый головкой 6. В это же время ведут запись текущей ошибки S, и перезапись корректируюп-1,е.го сигнала с использованием блока 3 магнитных головок. В результате перезаписи корректирующий сигнал синхронизируется по положению на ленте с записываемым сигналом ощибки.
Затем лентопротяжный механизм переключают на протягивание ленты в обратном направлении (фиг. 2 и 3). При этом сигнал ошибки 8v предыдущего воспроизведения считывается головкой 8 и подается на вход следящего привода, выходной сигнал е, которого поступает на вход элемента 12 суммирования. На другой вход этого же элемента подается сигнал Сч корреюции предыдущего воспроизведения, считываемый магнитной головкой 9. Выходной сигнал Cv4i элемента суммирования является корректирующим сигналом для последующего воопроиз ведения программы. Этот сигнал записывается мапнитной головкой 6 на ту же дорожку ленты, откуда был считан корректирующ.ий сигнал Cv предыдущего воспроиз ведения.
На фиг. 3 приведены временные диаграммы одной гармонической составляющей сигнала ощибки на входе и выходе следящего привода.
Выходной сигнал EV| сдвинут по фазе относительно входного 8v на угол Аф. Этот сдвиг фаз, рассматриваемый в отрицательном -времени, является запаздывающим. Если же его рассматривать в положительном времени, он является опережающим.
Схема и функционирование системы управления в режиме (v + 1)-то воопроизведения программы такие же, как и при v-ОМ воспроизведении, однако в системе теперь действует новый корректирующий сигнал, отличающийся
от предществующего на е, . В результате J ощибка воспроизведения получает приращение Asv+i, равное результату прохождения через следящий привод приращения корректирующего сигнала ACv+i е.. Последнее, пройдя через систему и изменив знак в элементе
0 10 суммирования, складывается в противофазе с сигналом ошибки предыдущего v-ro воспроизведения. Новая ошибка e.,+i при этом неизбежно уменьщается по отнощению к ошибке предыдущего воспроизведения.
5 После этого процесс повторяется.
Эффект от предлагаемого способа формирования корректирующего сигнала состоит в следующем. Пусть после очередного воспроиз|ведения программы регистрируется ошибка
С определенным спектром гарлюнических составляющих. Если ощибку пропустить через следящий привод в обратном направлении по времени, то на выходе получается тот же спектр, однако каждая гармоника изменяется
5 по амплитуде и .получает зап.аздывапие по фазе iB соответствии с амплитудно-фазовой характеристикой системы. Получающееся при этом фазовое запаздывание можно рассматривать как опережение по отношению к основной программе при воспроизведении ее в прямом направлении. Если теперь полученный сигнал пропустить через систему в прямо.м направлении при последуюп;ем воспроизведении нрограммы, то гармоники вновь изменяются
5 по амплитуде и получают такое же фазовое запаздывание. Суммарный фазовый сдвит каждой гармоники после двухкратного пропускания сигнала ошибки через систему управле1ния оказывается равным нулю. Поэтому в результате коррекции обеспечивается неизбежное уменьшение амплитуды каждой гармоники в спектре сигнала ошибки после каждого цикла коррекции программы. Изменение амплитуды гармоник после двойного прохождения сигнала ошибки через систему не нарушает условий сходимости Процесса коррекции, однако замедляет скорость сходимости на высоких частотах.
Предмет изобретения
Способ коррекции программы в системах программного упр-авлания от .магнитной ленты путем суммирования считанных при прямом
ходе магнитной ленты сигнала исходной программы и корректирующего сигнала, отличающийся тем, что, с целью обеспечения сходимости процесса коррекции в неограниченном диапазоне частот сигнала ошибки, корректирующий сипнал формируют при обратном ходе магнитной ленты как сумму корректирующего сигнала предыдущего воспроизведения и выходного сигнала системы при подаче па ее вход сигнала ошибки предыдущего
воопроизведения.
I t 
K/
32
3)
Cv+l
Фиг.З v.
v
v+;
Э
v-
1
b
9игЛ
y
s. I v
Фиг.5
