1
Изобретение относится к области станкостроения и может быть использовано в станках с программным управлением.
Известна фазовая система программного управления, содержащая блок задания лрограммы, выход которого соединен со входами последовательно включенных электрогидравлического усилителя и электрогидравличеокого распределителя, гидроцилиндр, кинематически связанный с датчиком обратной связи, который соединен с блоком коррекций, подключенным к блоку задания программы.
Однако динамические характеристики ее невысокие.
В .предложенной системе установлены гидрозамки, выходы которых соединены с полостями гидроцилиндра, и компенсационные гидроц.илиндры, входы которых подключены к одним выходам электрогидравлического распределителя, причем первые из входов гидрозамков соединены с выходами комяенсационных гидроцилиндров, а вторые-с другими выходами электрогидравличеокого распределителя, что позволяет улучшить ее динамические характеристики.
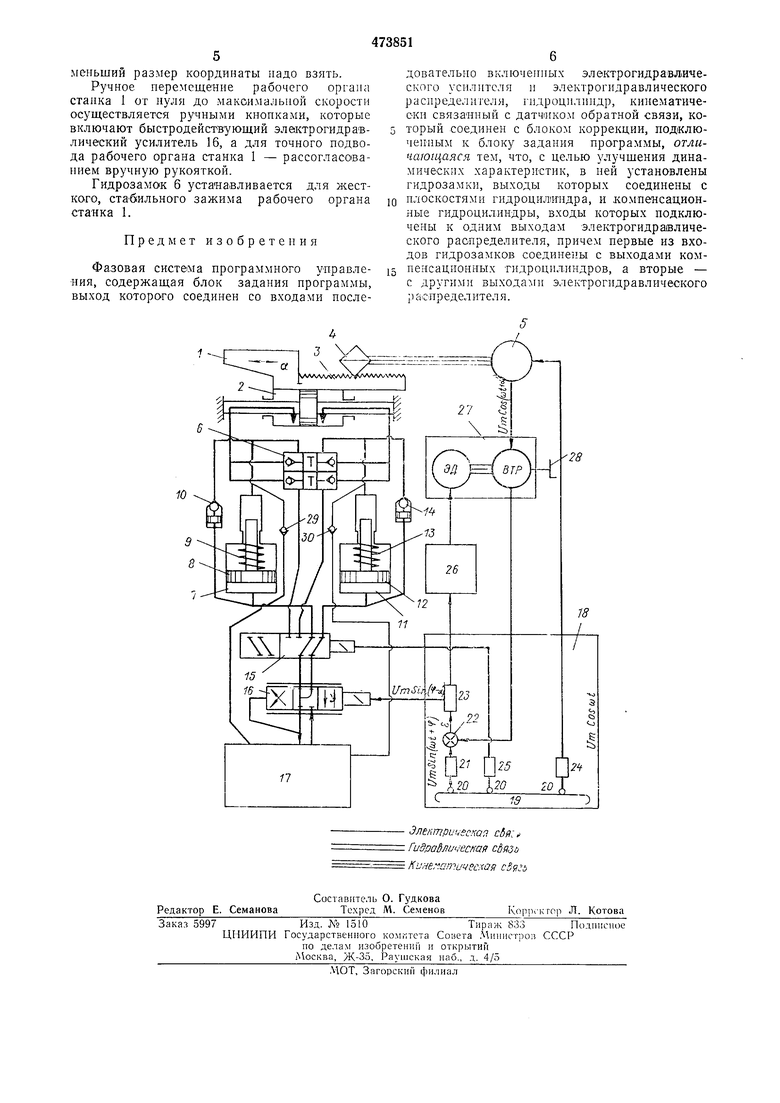
На чертеже изображена схема описываемой фазовой системы программного управления.
Фазовая система программного управления состоит из рабочего органа станка 1, связанного с гидроцилиндром 2, который через рейку 3 и безлюфтовый редуктор 4 связан с датчиком обратной связи 5. Гидроцилиндр через гидроза.мки 6 и компенсационные гидроцилиндры, состоящие: левый-из цилиндра 7, порщня 8, пружиНы 9, и обратного клапана 10, правый-из цилиндра II, норщня 12, пруж.ины 13, обратного клапана 14, связан с электрогидравлическим распределителем 15 и
быстродействующим электрогидравлическим ус)лителем 16, который подключен к насосной станции 17.
Управление гидроцилиндром по заданной программе осуществляется блоком задания
программы 18 (состоящим из магнитной ленты 19 с головками 20, усилителя 21 рабочего сигнала, фазового дискримииатора 22 с усилителем мощности 23, который связан с быстродействующим гидравлическим усилителем 16; усилителя онорного сигнала 24, который связан с датчиком обратной связи 5; усилителя 25 сигнала управления, который связан с электрогидравлическим распределителем 15), блоком 26 задания изменения размера координаты и блоком 27 коррекции на заданпое изменение раз.мера координаты. Для ручного управления рабочего органа станка служит рукоятка 28. Обратные клапаны 29 и 30 служат для возврата поршней компенсационных гидроцилиндров.
Оппсаплая фазовая система программиоIo уиравлсипя работает следующим образо М.
Включается насосная станция 17, блок задания программы 18 на холостом ходу, рабочий орган станка 1 и гидроц илиндр 2 ставятся в исходное ноложение и вводится задание изменения размера координаты с блоков 26 и 27. Блок задания программы 18 и насосная станция 17 включаются на рабочий ход и начинается иеремещение рабочего органа координаты а по заданной програм1ме.
На двух дорожках магнитной ленты 19 записаны синусоидальные сигналы-рабочий и „I sin((1)1 +(f) и опорный L,,,cos(o/. Фаза ср рабочего сигнала определяет собой заданный закон изменения управляемой координаты а. На третьей дорожке или заоисьгвается постоянный сигнал, или пет никакого сигнала в зависимости от заданной скорости перемещения рабочего органа координаты а. Сигнал с головки 20 отсутствует, и электрогидравлический распределитель 15 находится в положенин, указанном па чертеже.
Рабочий сигнал считывается магнитной головкой 20, усиливается усилителем 21 рабочего сигпала и подается на вход фазового дискриминатора 22.
Онорпый сигнал считывается магнитной голОВКой 20, усиливается усилителем опорного сигпала 24 и подается па датчик обратной связи 5, ротор которого кинематически связан через безлюфтовый редуктор 4 и рейку 3 с рабочим гидроцилиндром 2 рабочего органа станка 1. Его выход, на котором получается сигпал L,„ cos (), где а - электрический сигпал, равный механическому а, подается на один из входов фазового дискриминатора 22, являющегося в первом приближении множительным устройством.
На другой вход фазового дискриминатора ( как было указано выше), подается усиленный рабочий сигнал LJ „sin (ш/ + ф). В результате перемешивания этих сигналов па выходе получается сигпал, постоянная составляющая которого S прапорциопальпа и,„ sin (ср-а). Это напряжение является сигналом ощибки следящего привода. Далее этот сигнал усиливается усилителем мощпостп 23 и подается на быстродействующий электрогидравлический усилитель 16, который подает рабочую жидкость из насосной станции 17 через электрогидравлический распределитель 15 в компенсационный цилиндр 11 (папример, правый) - поршень 12 начинает перемещаться и через гидрозамок 6 подает рабочую жидкость, уменьшенную по расходу в несколько раз, в гидродилиндр 2. Слив жидкости из рабочего гидродилиндра 2 происходит через гидрозамок 6, обратпый клапан 10, электрогидравлический распределитель 15 и электрогпдравлическяй усилитель 16 в насосную станцию 17. Начинается перемещение рабочего органа станка 1. Рейка 3, перемещаясь через безлюфтовый редуктор 4, стремится установить управляемую координату а в TaiKoe положение, прп котором сигнал ощибки равен или блнзок к иулю. Для перемещения ра бочего органа станка 1 на больщих
скоростях подачи рабочей жидкости на двух дорожках магнитной ленты 19 записываются сипусоидальные сигналы - рабочий и опорный, а на третью дорожку записывается постоянный сигнал. В таком случае сигпал с
головки 20, усиленный усилителем 25, переключает электрогидрав-тический распределитель 15 и соединяет быстродействующий электрогидравлический усилитель 16 напрямую с рабочим гидроцилиНдром 2 через гидроза мок 6.
Рабочий сигпал считывается магнитной головкой 20, усиливается усилителем 21 рабочего сигнала и подается на вход фазового дискри(минатора 22.
Онорпый сигпал считывается магнитной головкой 20, усиливается усилителем опорного сигнала 24 и подается на датчик обратпой связи 5, выход которого является сигналом фазового дискриминатора 22.
На другой вход фазового дискриминатора (как было указано выше) подается усиленпый рабочий сигнал из усилителя 21. В результате перемещпвания этих сигналов на выходе нолучается сигнал ошибки следящего
привода, который усиливается усилителем мощности 23 и подается на быстродействующий эле.ктрогидравличеокий усилитель 16, который подает рабочую жидкость из насосной станции 17 через переключенный электрогидравлический распределитель 15, непосредственно через гидрозамок 6 в рабочий гидроцилиндр 2 - начинается перемещение рабочего органа станка 1 па больших скоростях. Рейка 3, перемещаясь через безлюфто1вый
редуктор 4, стремится установить управляемую координату а в такое положение, при коюром сигпал ошибки равен и близок к нулю.
В любой момент, когда гидроцилиндр 2,
перемещаясь в ту пли другую сторону, оста1гавливается, пружины 9 или 13 возвращают норшни 8 и 12 в исходное положение, что позволяет всегда вводить в рабочее положение компенсациопные гидроцилиндры.
Если требуется в систему управления гидроцилиндром по дапной программе ввести коррекцию изменения размера координаты, то включают блок 26 задания изменения размера координаты с заданной степенью коррекции размера координаты. Тогда рабочий сигнал ощибки следящего привода из усилителя мощности 23 кроме быстродействующего электрогидравлического усилителя 16 подается в блок задания изменения размера координаты, который по заданной программе воздействует на блок 27 коррекции на заданное изменение размера координаты .и дополнительно рассогласовывает рабочий сигнал ошибки следящего привода в ту или другую
сторону в зависимости от того, больший или
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции эквидистанты в фазовых системах числового программного управления | 1973 |
|
SU482725A1 |
| В ПТБJ.j.t^ ./,',IV vr, J-Jwulb^^^i' I 'jt^ | 1973 |
|
SU370375A1 |
| Устройство для записи на магнитнуюлЕНТу пРОгРАММы упРАВлЕНия CTAHKOM СфАзОВОй СиСТЕМОй чиСлОВОгО пРОгРАММНОгОупРАВлЕНия | 1979 |
|
SU849149A2 |
| Устройство для ввода пермутационных кассет в стенки скважины | 1987 |
|
SU1548341A1 |
| Самонастраивающаяся система программного управления | 1984 |
|
SU1302240A1 |
| УСТРОЙСТВО для ЗАПИСИ НА МАГНИТНУЮ ЛЕНТУ | 1973 |
|
SU399828A1 |
| Фазовая следящая система | 1976 |
|
SU613292A1 |
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1991 |
|
SU1775527A1 |
| УСТРОЙСТВО для СИНХРОНИЗАЦИИ СТАНКОВ с ФАЗОВОЙ СИСТЕМОЙ ЧИСЛОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ | 1973 |
|
SU408275A1 |
