1
ИзОбретение относится к области автоматического контроля сложных бортовых радиоэлектронных систем, а именно к области косвенных детерминистических способов диагностики изменений параметров элементов в нерасчлененной системе ino данным измерений параметров сигналов (напряжений, токов и др.).
В нерасчлененной системе возможность непосредственного определения параметров элементов в общем случае лринц.ипиально исключена, поэтому возникает задача определения их состояния по контролируемым параметрам системы. Существующие .методы поиска отказов относятся к случаям уже свершивщи.хся фактов и содержат такое число этапов контроля, которое определяется конструктивно-схемным построением системы (количеством «алалов, блоков, субпанелей, узлов, каскадов). На последнем этапе -осуществляется .поиск отказавшего элемента в каскаде с расчленением его (в общем случае) на элементы.
Цель изобретения - ловыщение эффективности прогнозирования.
Цель достигается тем, что по предлагае.мому способу 1ПОИСК элементов с назревающими отказами осуществляется до свершения фактов отказоБ и сводится к двум этапам контроля, каждый из которых определяется соответствующим принципом рещения последовательных частных задач.
Первый этап. Отличительная особенность его от первых этапов контроля, проводимых в соответствии с известными способа.ми, состоит в том, что контролируемые сигналы системы (напряжения, токи и др.) назначают не по признаку охвата всех функциональных с.хем, а по признаку характера их
связей (операторных) с входными сигналами через пара.метры эле.ментов.
В любой систе.ме -можно однозначно выделить .минимальную совокупность прогнозирующих сигналов, охватывающих все множество элементов, т. е. такие наибольщие подсисте.мы («характеристические подсисте.мы, ХПС), пара.метры выходных сигналов которых являются непрерывны.ми функциями, параметров составляющих элементов:
20
т
SdY . ,
(1) - АЕ. /.
.1
25
У - параметр выходного сигнала характеристической подсистемы, представленный в линеаризованной форме относительно всех т параметров (|) элементов.
Сам подсистемы не пересекаются между обой,
- о,(2)
где в - характеристическая подсистема k-их
ЧИСЛО Б системе,
П - символ пересечен-ия, и охватьгвает всю систему:
t/йв;. Т(3)
де и - символ объединения, Т-полное множество характеристических подсистем.
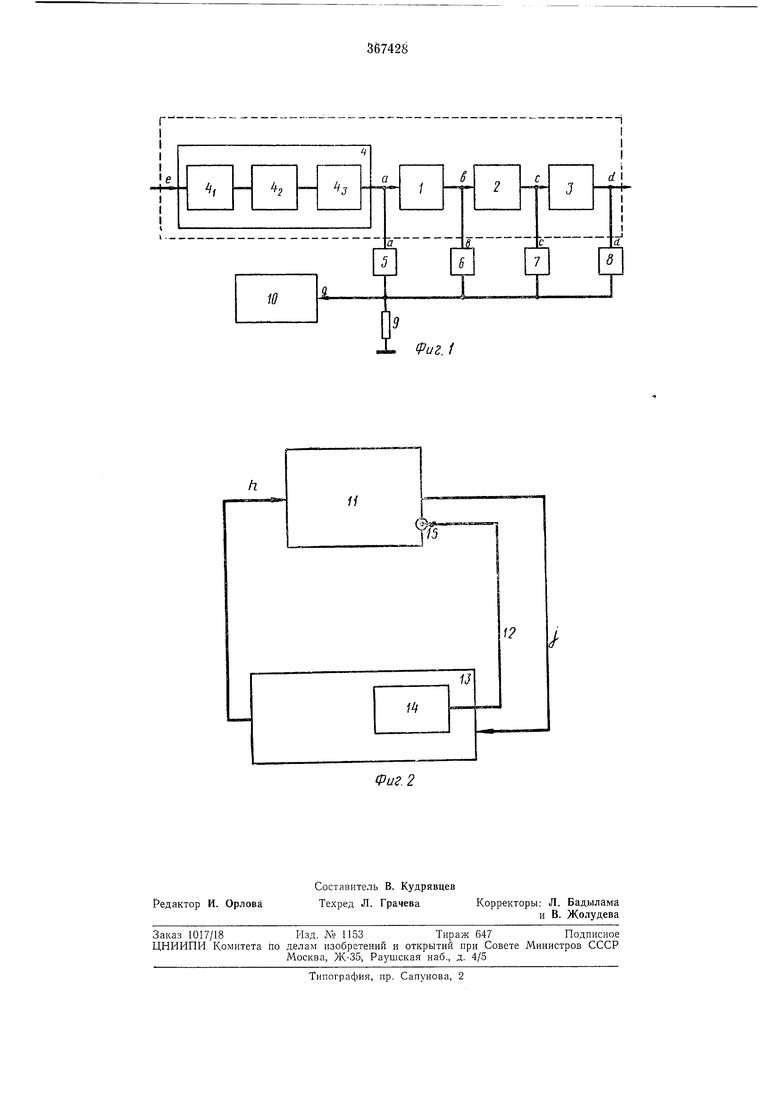
На фиг. 1 приведена блок-схема системы, остоящей из трех блокинг-генераторов, иллютрирующая способ распознаваиия характеритической подсистемы с назревающим отказом на первом этапе контроля; иа фиг. 2 - блокхема выявленной на первом этапе характеритической подсистемы, подлежащей восстановению.
iB характеристических подсистемах 1, 2, 3 типа блокинг-генераторов входные сигналы, а Ь, с не влияют на выходны-е сигналы (для подистемы / а - входной сигнал,, - выходно-й, ля подсистемы 2 b - входной сигнал, с - выходной. Для .подсистемы 3 входной сигнал с, выходной d). В характеристической подсистеме 4 типа трехкаскадного усилителя с промежуточными Подсистемами 4i, 4, 4з выходной сигнал а зависит от входиого сигнала е. Система содержит также разделительные и фазосдвигающие устройства 5, 6 7, 8, резистивный элемент Я анализирующее спектр контрольно-вычислительное устройство 10, на вход которого поступает смешанный сигнал g.
На характеристическую подсистему // (см. фиг. 2), в которой Имеется элемент с назревающи.м отказом, через канал 12 действует автоматическое устройство 13 .воздействия и контроля, содержащее эталонные элементы 14.
В подсистеме // имеется контрольная точка 15.
Анализ системы с точки зрения выполнения условий (1), (2), (3) показывает, что характеристическими подсистемами являются подсистемы 1, 2, 3 и 4, поскольку подсистема 4 образует максимальную по отнощению к 4, 4ч, 4з подсистему, обладающую свойством (I).
Следовательно, минимальной совокупностью прогнозирующих сигналов системы являются выходные сигналы а, Ь, с, d характеристических подсистехМ 4, 1, 8, 3 соответственно.
Отличие первого этапа контроля состоит в смешении в пределах самой системы или вне ее с помощью разделительных (диоды, катодные повторители др.) и фазосдвигающих (линии задержки и др.) устройств 5-8 выходных сигналов для образования смешанного сигнала g на элементе 9. В результате в одном канале связи системы со спектр-анализатором и из.мерительно-вычислительным устройством 10 выделяется многомерный сигнал.
несущий информацию о состоянии выходных сигналов всех ХПС и, следовательно, всех составляющи.х элементов НО их определяющим (для данной системы) параметрам.
Таким образом, на первом этапе контроля осуществляются следующие операции:
выделение в системе характеристических подсистем и их выходных сигналов;
смешение выходных сигналов на одном элементе с помощью разделительных и фазосдвигающих устройств;
измерение на различных частотах, число которых равно (или, больше) числу существенных пара.метров смешиваемых сигналов, значений напряжений смешанного сигнала;
определение по данным измерений и известным весовым коэффициентам параметров выходных сигналов для эталонной систехмы фактических из.менений этих параметров для выявления по ним характеристической (подсистемы с назревающим отказом.
Второй этап отличается от вторых этапов контроля в известных способах тем, что к выявленной на перво.м этапе контроля хара ктер,истической подсистеме // (фиг. 2), подлежащей восстановлению до проявления отказа, от автоматического устройства ЛЗ подается
входной сигнал h, по каналу 12 связи этого устройства с выбранной контрольной точкой 15 подсистемы производится (т-1)-(или более)-кратное подкл,ючение такого же числа эталонных элементов 14. До подключения и
при каждо.м подключенном элементе с помощью устройства 13 изменяется значение напряжения выходного сигнала /, затем по данным измерений и по ,и.звестным для эталонной иодсисте.мы значениям весовых коэффициентов параметров элементов определяются фактические изменения этих параметров для выявления 1ПО ним элемента с назревающим отказом.
Второй этап отличается от первого этапа тем, что путем (т-1)-кратного анал,иза выходного сигнала характеристической подсистемы при т-1 частотах или в т-1 различных моментов времени задача разпозна-вания не
разрешима. Таким путем можно определять лишь параметры частотной характеристики ил,и импульсной переходной функции ,подсистемы, но принципиально невозможно определять количественные изменения параметров
эле.ментов (сопротивлений, емкостей и т. д.). Это является следствием свойства функций типа передаточных, частотных и входных характеристик, заключающегося в то-м, что сумма взвешенных частотных производных этих функций по пара.метрам сопротивлений всех элементов равна произведению самой функции на ее размерность относительно сопротивления. Следовательно, для частотной характеристики подсистемы (ка-к и для передаточной и
импульсной переходной функций) эта сумма равна Нулю, и задача раопознаваНИЯ элемента с назревающим отказом указанным путем не может быть решена.
Таким о бразом, второй этап ко-нтроля содержит следующие операции:
(т-1)-кр.атное подключение при шоданно.м входном сигнале т-1 эталонных элементоБ к одной (или нескольким) контрольной точке;
измерение т значений напряжений выходного сигнала.;
определение по данным 1измерен«й и по известным для эталонной подсистемы весовым коэффициентам параметров элементов факт1Ических изменений этих параметров для выявления по ним элемента с назревающим отказом.
В отличие от существующих детермииистических способов технического обслужив-аняя систем, в том числе систем радиоэлектроники, а та-кж-е известных статистиче1ских способов распознаваиия образов, оредлагаемый способ позволяет однознач-но определять -количественные изменеиия всех составляющих систему элементов, Непосредственно в ней не контролируемых, с указанием адреса того элемента, в котором назревает отказ.
Предмет изобретения
Способ выявления и предупреждения назревающих отказов в радиоэлектронных системах, Основанный иа измерении и анализе выходных сигналов в некоторых точках контролируемой системы, отличающийся тем, что, с целью повыщения эффективности -прогнозирования, выделяют подсистемы контролируемой
системы, выходной сигнал которых в заданных пределах не зависит от величины входного сигнала, выходные сигналы этих подсистем смещивают, разлагают на частотные составляющие и сравнивают напряжения различных
частот с эталонными значениями, выделяют подсистему контролируемой системы, для которой полученные сигналы больше допустимой величины, сравнивают напряжения на выходе каждого элемента выделенной подсистемы
.при фиксированном входном сигнале с напряжениями, полученными на его выходе при .noочередном подключении к нему эталонных элементов, из полученных разностных ситналов формируют сигналы, соответствующие
контролируемым параметрам элемента подсистемы, сравнивают их с номинальными значениями и выделяют элемент подсистемы, для которого разностные сигналы больше допустимого предела.
12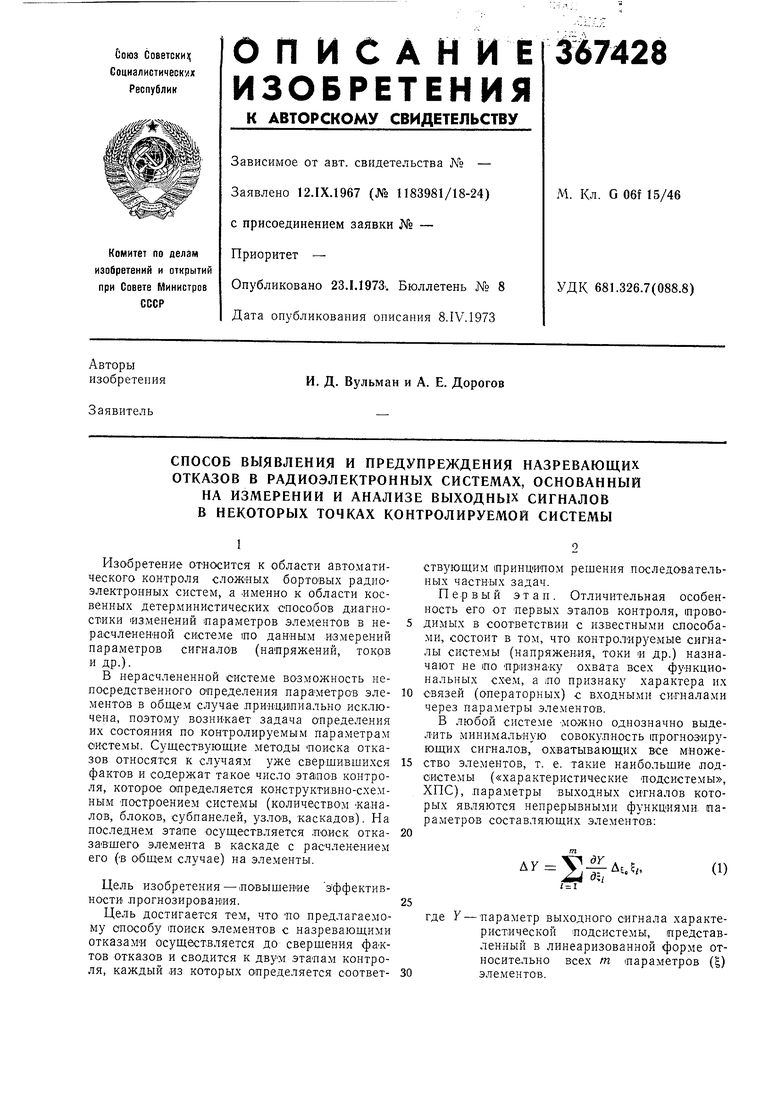
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система для контроля радиолокационной станции | 2016 |
|
RU2648585C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМАМИ НА ОСНОВЕ НЕЙРОСЕТЕВОГО ДИАГНОСТИРОВАНИЯ НЕИСПРАВНОСТЕЙ И ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОПРИВОДНОГО ГАЗОПЕРЕКАЧИВАЮЩЕГО АГРЕГАТА | 2017 |
|
RU2648413C1 |
| Способ и система мониторинга оборудования на основе совместного статистического и физического моделирования | 2021 |
|
RU2780968C1 |
| Территориально-распределенный испытательный комплекс (ТРИКС) | 2018 |
|
RU2691831C1 |
| СПОСОБ ТЕСТИРОВАНИЯ КАНАЛА УПРАВЛЕНИЯ БОРТОВОЙ АППАРАТУРОЙ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2653670C1 |
| Способ диагностики отказов динамических объектов и устройство для его осуществления | 1990 |
|
SU1718190A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2013 |
|
RU2534955C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ЭЛЕКТРОПОЕЗДА | 2018 |
|
RU2733594C2 |
| АВТОНОМНАЯ СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ | 1991 |
|
RU2035109C1 |
| Система технического диагностирования и мониторинга АДК-СЦБ | 2020 |
|
RU2751354C1 |