1
Уст|ройство относится к автоматизированным транспортным системам периодического действия и может быть использовано в системе управления .подвижным объектом, где применяется автоматический останов по задаваемому адресу одной или нескольких зон погрузочно-разгрузочных работ.
Известны системы транспорта для автоматического адресного останова подвижных объектов с .целью выполнения погрузочноразгрузочных операций, использующие априорную информацию. П|ри этом выполнение требования останова транспортного механизма обеспечивается дололнительной априорной информацией о снижении скорости и экстренном торможении в зоне останова.
Использование этой информации усложняет систему управления, предъявляет высокие требования к монтажу датчиков первичной информации и элементов транспортной системы и во мНогих случаях не решает задачи останова Т1ранспортного механиз.ма с заданной точностью, поскольку не учитывает его переменной инерционности, состояния пути, качества монтажа и деформааии элементов металлоконструкции транспортной системы с одной стороны и изменение геометрии здания в процессе его эксплуатации, вызванное явлением осадки здания, действие.м ветровых и снеговых нагрузок с другой.
Целью изобретения является повышение
точности останова транспортного механизма
в зоне автоматического адресования путе.м
использования текушей информации вместо
дополнительной априорной.
Предложено устройство, управляюц1ее транспортным механизмом, которое обеспечивает его останов при погрузочно-разгрузочных операциях с большей точностью, снижает требования к монтажу элементов транспортной системы, повышает коэффициент использования (Полезной площади за счет уменьшения ширины ячеек стеллажа, повышает производительность, исключает аварийные состояния при неточном останове.
В устройстве определяются расстояния между фиксированными плоскостями стоек стеллажа и рабочего органа (плоскости расположены симметрично относительно центров ячеек и рабочего органа). Эта информация дискретным методом сравнивается. При рассогласовании сигналов аналоговых датчиков вырабатывается сигнал управления горизонтальным движением транспортного механизма в положение точного останова.
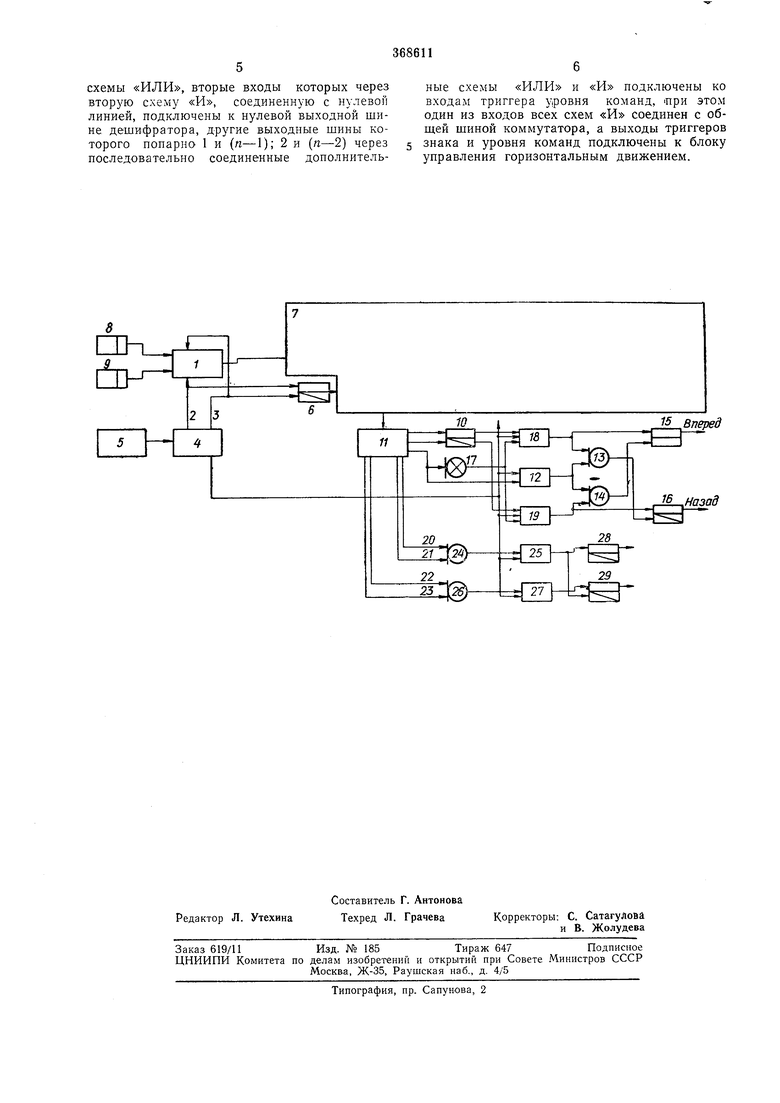
На чертеж:е показано предложенное устройство.
Оно содержит устройство для точного останова, которое работает на текущей информации, контролируя положение транспортного механизма в зоне ячейки после отработки априорной информации, и вырабатывает управляющий сигнал.
Каждая ячейка стеллажа ограничена стойками. Останов транспортного механизма в зоне ячейки должен выполняться с допуском, О&еопечивающим нормальное выполнение пОЦрузочно-разгрузочных операций.
Для фиксации транспортного механизма по центру относительно стоек стеллажа (ячейки) и (Получения текущей информации достаточно иметь значения расстояний между плоскостями стоек и боковыми плоскостями рабочего орга«а. Для этого на транспортном механизме установлены симметрично два аналоговых датчика электромеханического, иедуктивного, емкостного, олтическаго или другого принципа действия, кото,рые вырабатывают сигнал, пропорциональный значениям расстояний между плоскостями стоек и боковыми плоскостями рабочего органа.
Преобразование непрерывных величин в серию импульсов осуществляет генератор импульсов 1. Очередность и время выдачи серии импульсов определяются состоянием выходов коммутатора 4, управляемого сигналами генератора, тактовых импульсов 5. Причем число имлульсов в каждой серии зависит от уровня сигнала соответствующего аналогового датчика. В течение фиксированного интервала времении серии импульсов в зависимости от разрешающего потенциала на выходе триггера 6 подаются на вход реверсивного двоичного счетчика 7. Счетчик выполняет функции запоминающего и сравнивающего устройства.
В период первого хронизирующего импульса счетчик .работает в режиме «сложения. В результате в него вводится число импульсов, пропорциональных сигналу датчика i.
В .период второго хронизирующего импульса счетчик работает в режиме «вычитания, и в него вводится число импульсов, пропорциональных сигналу датчика 9.
Первая серия импульсов выводит счетчик из Нулевого состояния в вызывает на первой выходной шине дешифратора появление сигнала, который устанавливает триггер 10 в единичное состояние.
Если вторая серия импульсов равна первой, счетчик возвращается в нулевое положение.
Если первая серия импульсов .больше второй, в счетчике остается некоторое положительное число и триггер 10 сохраняет единичное состояние, если наоборот в счетчике будет отрицательное число, получение которого вызывает переход комбинации сигналов на выходах, соответствующих последовательности кода «I, «О и «II. В результате такого перехода состояний счетчика триггер 10 устанавливается в положение II.
В случае равенства введенных чисел импульсов счетчик устанавливается в нулевое положение, и на выходной шине дешифратора 11, соответствующей нулю, появляется сигнал, который в третьи хронизирующий период через последовательно соединенные схемы «И 12 и «ИЛИ 13 и 14 дает подтверждение тригге|рам знака команды 15 и 16 Oi6 отсутстВИИ рассогласования.
В случае неравенства сигналов датчиков на выходе схемы П возникает потенциал, и в третий хронизирующий период дается разрешение на ввод результирующего сигнала
«1 или «II с триггера Ш через схемы 18 н 19 в триггер зна.ка команды 15 или 16. Последний устанавливается в единичное состояние, и на его выходе появляется командный сигнал условного знака «вперед или
«назад.
В это ж-е время с выходных шин дешифратора в комбинациях первая 20 и (п-1) 21, вторая 22 и (п-2) 23 и т. д., (число комбинаций устанавливается в зависимости от требуемой точности останова и особенностей электропривода механизма и передвижения), через последовательно соединенные схемы 24, 25, и 26, 27 в триггеры уровня команды 28-29, также вводится сигнал.
Один из триггеров устанавливается в единичное состояние, и на его выходе появляется командный сигнал, определяющий абсолютную величину скорости перемещения транспортного механизма. Таким образом получают направление и скорость перемещения транспортного механизма. По мере приближения к «нейтральному положению в зоне останова, в котором серии импульсов датчиков S и 9 равны, в процессе последующих
сравнений скорость транспортного механизма снижается.
Каждое сравнение выполняется после четвертого хронизирующего импульса, устанавливащего счетчик в нулевое состояние.
Предмет изобретения
Устройство для автоматического управления транспортным механизмом, содержащее программные блоки адресов ячеек и погрузочно-разгрузо,чных операций, подключенные к счетным блокам адресов горизонтальных и вертикальных рядов стеллажей, соединенных с блоками управления горизонтальным, вертикальным движением транспортного механизма и блоком управления рабочим органом, отличающееся тем, что, с целью повышения надежности и точности работы устройства, счетный вход двоичного реверсивного счетчика подключен через генератор импульсов к датчикам положения, другие входы счетчика « входы геНератора и.мпульсав подключены к коммутатору, соединенному с генератором тактовых импульсов, а выходы двоичного реверсивного счетчика подключены ко входу дешифратора, первая и последняя шины которого подключены ко входам первого триггера, выход которого через первую и третью схемы «И соединен с первыми входами триггеров знака сигналов,
другие входы которых через первую и вторые
схемы «ИЛИ, вторые входы которых через вторую схему «И, соединенную с нулевой линией, подключены к нулевой выходной шине дешифратора, другие выходные шины которого попарно 1 и (п-Г); 2 и (я-2) через последовательно соединенные дополнительные схемы «ИЛИ и «И подключены ко входам триггера уровня команд, при этом один из входов всех схем «И соединен с общей шиной коммутатора, а выходы триггеров знака и уровня команд подключены к блоку управления горизонтальным движением.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| Устройство для управления краном-штабелером | 1988 |
|
SU1558822A1 |
| УСТРОЙСТВО для ВЫЧИСЛЕНИЯ линий'РЕГРЕССИИ | 1971 |
|
SU290282A1 |
| Вычислительное устройство для реализации логических функций | 1983 |
|
SU1269130A1 |
| Устройство для поиска перемежающихся неисправностей | 1985 |
|
SU1262502A1 |
| Устройство для управления автоматическими транспортными средствами | 1983 |
|
SU1101841A1 |
| Сигнатурный анализатор для поиска перемежающихся неисправностей | 1986 |
|
SU1495799A1 |
| Информационное устройство для стеллажных складов | 1982 |
|
SU1123957A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
| УСТРОЙСТВО для СЧИТЫВАНИЯ ОСЦИЛЛОГРАММ | 1968 |
|
SU218546A1 |
IS Вперед IB Назад
