1
Устройство относится ,к области автоматического управления электроприводами постоянного тока, а именно к устройствам токоограничения в системах лодчиненного регулирования, в которых требуется.ограничение токов, возникающих как под действием нагрузки, так и при отработке -сигнала задания. К таким приводам относятся, например, приводы копающих механизмов одноковшовых экскаваторов, для которых характерно широкое изменение нагрузки, включая работу на упор.
В современных системах подчиненного регулирования с регуляторами скорости и тока токоогракичение осуществляется включением в цепь обратной связи регулятора тока нелинейных элементов, ограничивающих сигнал управления. .Такие системы управления дают возможность хорошо формировать переходные процессы при отработке сигнала задания. Однако при воздействии нагрузок, превышающих стопорные, они недостаточно эффективно ограничивают выбросы тока, которые могут значительно превосходить допустимые значения.
Цель изобретения - повысить быстродействие привода и уменьшить выбросы тока якоря в пуско-тормозных режимах и при изменении нагрузки.
Для достижения этой цели ко входу регулятора тока дополнительно через нелинейный
элемент подключена цепь отрицательной обратной связи по току с передаточным коэффициентом, выбираемым по критерию обеспечения .автоколебательного режима системы.
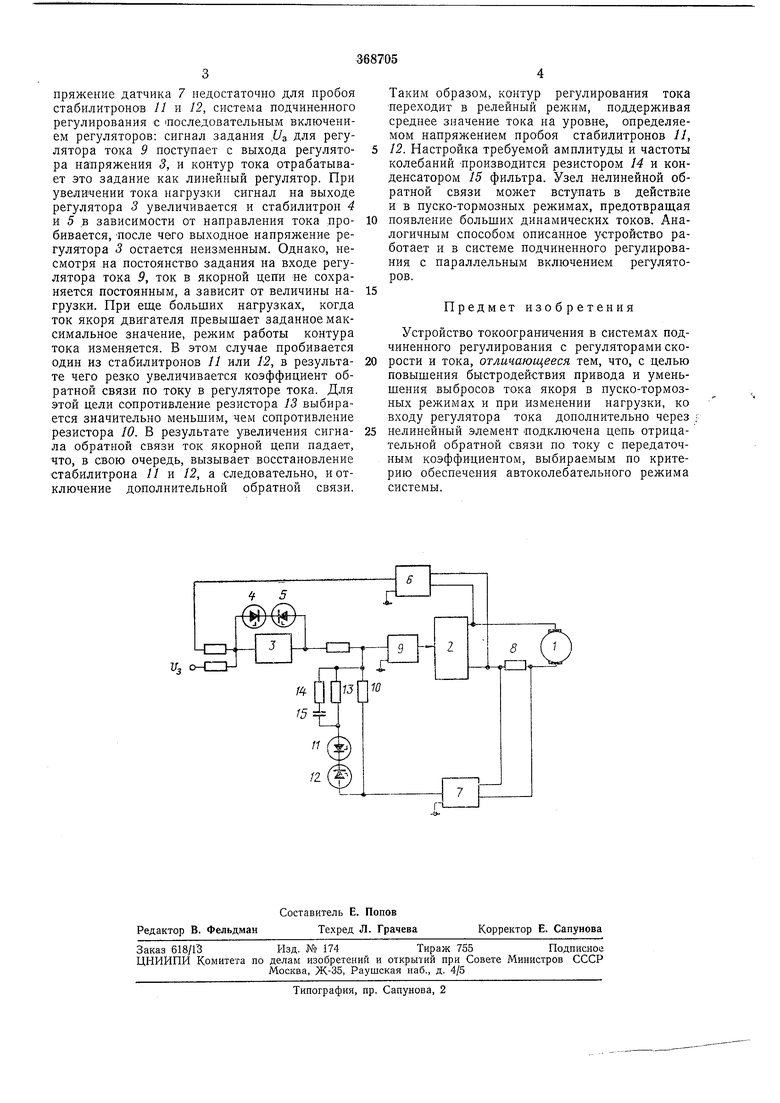
На чертеже приведена схема предложенного устройства.
Устройство токоограничения является частью системы подчиненного управления двигателем /, который питается от преобразователя 2.
Система управления с последовательным включением .регуляторов является двухконтурной. Внешний контур регулирования напряжения состоит из регулятора напряжения 3 с ограничивающими стабилитронами 4 и 5 и датчика напряжения 6. .Внутренний контур регулирования тока содержит датчик тока 7, преобразующий сигнал, который поступает от шунта 5 в силовой цепи двигателя, и .регулятор тока 9 с узлом обратных связей по току.
Этот узел содержит две цепи: .цепь линейной обратной связи на резисторе 10 я цепь нелинейной обратной связи. Последняя состоит из релейного элемента, выполненного на стабилитронах //, 11, а также фильтра на резистоpax 13, 14 и конденсаторе 15.
Режим работы системы управления, содержащей предлагаемое устройство ограничения тока, зависит от величины нагрузки двигателя. При токах якоря двигателя, меньших заданного максимального значения, когда напряжение датчика 7 недостаточно для нробоя стабилитронов 11 и 12, система подчиненного регулирования с последовательным включением регуляторов: сигнал задания ,/з Для регулятора тока 9 поступает с выхода регулятора напряжения 3, и контур тока отрабатывает это задание как линейный регулятор. При увеличении тока нагрузки сигнал па выходе регулятора 3 увеличивается и стабилитрон 4 и 5 в зависимости от направления тока пробивается, После чего выходное напряжение регулятора 3 остается неизменным. Однако, несмотря на постоянство задания на входе регулятора тока 5, ток в якорной цепи не сохраняется постоянным, а зависит от величины нагрузки. При еще больших нагрузках, когда ток якоря двигателя превышает заданное максимальное значение, режим работы контура тока изменяется. В этом случае пробивается один из стабилитронов 11 или 12, в результате чего резко увеличивается коэффициент обратной связи по току в регуляторе тока. Для этой цели сопротивление резистора 13 выбирается значительно меньшим, чем сопротивление резистора 10. В результате увеличения сигнала обратной связи ток якорной цепи падает, ЧТО, в свою очередь, вызывает восстановление стабилитрона 11 и 12, а следовательно, и отключение дополнительной обратной связи. Таким образом, контур регулирования тока переходит в релейный режим, поддерживая среднее значение тока на уровне, определяемом напряжением пробоя стабилитронов 11, 12. Настройка требуемой амплитуды и частоты колебаний производится резистором 14 и конденсатором 15 фильтра. Узел нелинейной обратной связи может вступать в действие и в пуско-тормозных режимах, предотвращая появление больших динамических токов. Аналогичным способом описанное устройство работает и в системе подчиненного регулирования с параллельным включением регуляторов. Предмет изобретения Устройство токоограничения в системах подчиненного регулирования с регуляторами скорости и тока, отличающееся тем, что, с целью повышения быстродействия привода и уменьшения выбросов тока якоря в пуско-тормозных режимах и при изменении нагрузки, ко входу регулятора тока дополнительно через : нелинейный элемент подключена цепь отрицательной обратной связи по току с передаточным коэффициентом, выбираемым по критерию обеспечения автоколебательного режима системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом постоянного тока | 1970 |
|
SU515230A1 |
| Система подчиненного регулирования электропривода постоянного тока | 1974 |
|
SU506105A1 |
| Устройство для ограничения тока нагрузки экскаваторного электропривода постоянного тока | 1980 |
|
SU1048066A1 |
| Устройство управления электроприводом | 1985 |
|
SU1305640A2 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| РЕВЕРСИВНЫЙ ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД | 1995 |
|
RU2103797C1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
| Устройство для управления электроприводом поворота одноковшового экскаватора | 1975 |
|
SU670695A1 |
| Устройство для управления электродвигателем механизма поворота карьерного экскаватора | 1986 |
|
SU1461839A1 |
3
