1
Изобретение относится к области промышленного транспорта, а именно к устройствам для передачи штучных грузов с одного конвейера на другой, расположенный под углом к нему.
Известны устройства для передачи штучных грузов с одного конвейера на другой, расположенных под углом друг к другу, содержащие шариирно смонтированную поворотную в горизонтальной плоскости стрелу с бесконечно замкнутой лентой, огибаюшей вертикально расположенные барабаны, один из которых установлен на приводном валу. Цель настоящего изобретения - создание определенного цикла времени на поворот стрелы в рабочее положение и обратно для возможности использования устройства в автоматизированных сортировочных линиях, а также исключение необходимости реверса электродвигателя для возврата поворотной стрелы из рабочего положения в исходное и фиксации ее в этих положениях.
Это достигается тем, что на приводном валу барабана установлен червяк, взаимодействующий с червячным колесом, посаи-сенным на горизонтальном валу, снабженном конической шестерней, находящейся в зацеплении с конической шестерней, установленной на вертикальном валу, на котором установлен фасонпый кулачок, взанмодействующий с роликом, расположенным на зубчатом секторе, закрепленном в опорах, причем на стреле посредством кронштейна л естко смонтирована подпружиненная втулка с зубчатым венцом, взаимодействующим с сектором.
Для передачи всего потока грузов с одного конвейера на другой на подпружиненной втулке закреплен рычаг, контактирующий с электромагнитным фиксатором, удерживающим стрелу в рабочем положении.
Для отключения электродвигателя после поворота стрелы в рабочее положение и обратно на горизонтальном валу установлен кулачок, взаимодействующий с датчиком, сблокированным с приводом устройства.
Для обеспечения снятия ленты без разборки стрелы последняя размещена между ветвями ленты.
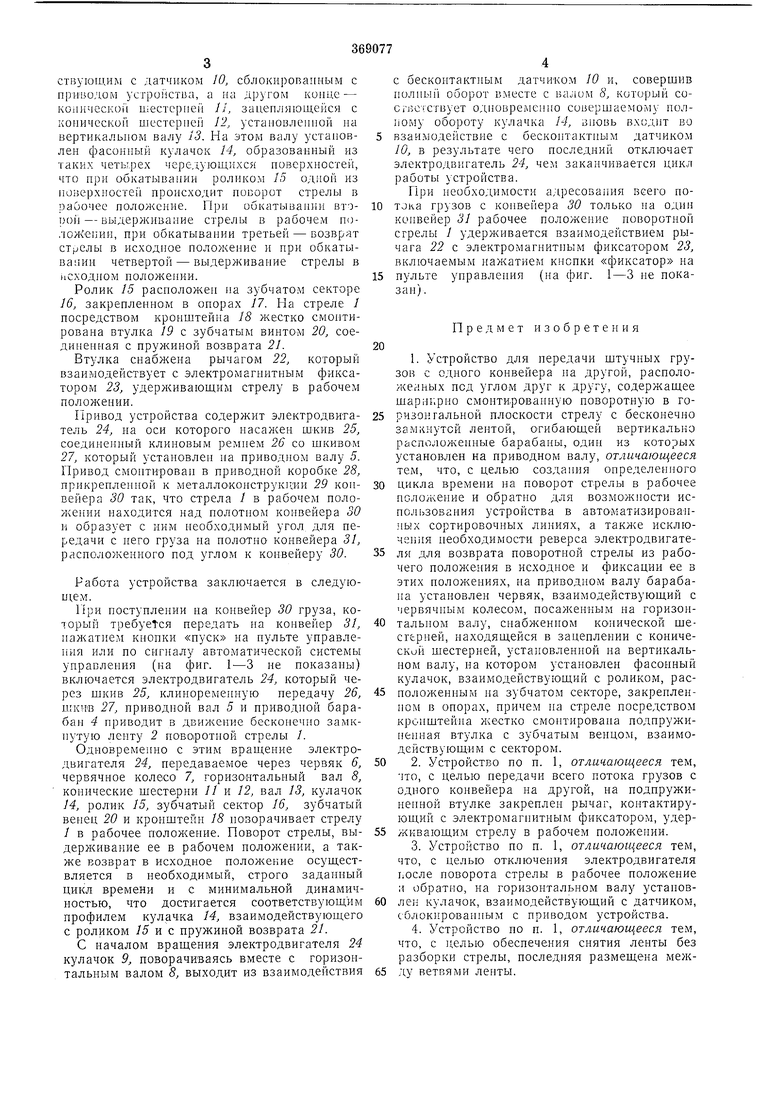
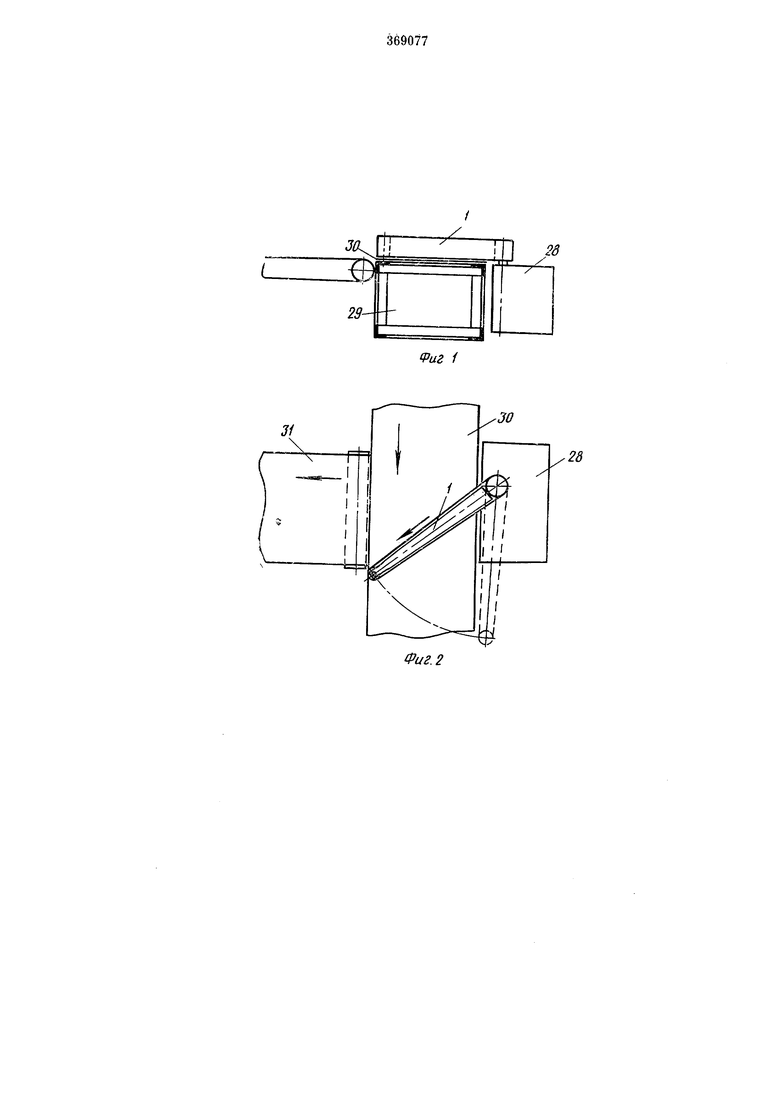
На фиг. 1 изображено предлагаемое устройство в общем виде; на фиг. 2 - то же в плане; на фиг. 3 - устройство в аксонометрической проекции.
Поворотная в горизонтальной плоскости стрела / бесконечно замкнутой ленты 2, огибает вертикально расположенные барабаны 3 и 4. Барабан 4 установлен на приводном валу 5, на котором установлен червяк 6, взаимодействующий с червячным колесом 7, сидящим на горизонтальном валу 8, снабл енном на одном конце кулачком 9, взаимодействующим с датчиком 10, сблокированным с прИВодом ycTpoiicTBa, а иа конце - конической шестерней //, заценляющейся с конической шестерне) 12, установленной на вертикальном валу 13. На этом валу устаиовлен фасонный кулачок 14, образованный из TaKPix четырех чере.лующихся иоверхностей, что нри обкатывании роликом /5 одной из поверхностей происходит иоворот стрелы в раОочее иоложение. При обкатываиии второй - выдерживание стрелы в рабочем положении, при обкатывании третьей - возврат стрелы в исходное положение и нри обкатывании четвертой - выдерживание стрелы в исходном иоложении.
Ролик 15 расположен на зубчатом секторе 16, закрепленном в опорах 17. На стреле / посредством кронштейна /8 жестко смонтирована втулка 19 с зубчатым винтом 20, соединенная с пружиной возврата 21.
Втулка снабжена рычагом 22, который взаимодействует с электромагнитным фиксатором 23, удерживающим стрелу в рабочем положении.
Привод устройства содержит электродвитатель 24, иа оси которого насажен шкив 25, соединенный клиновым ремнем 26 со шкивом 27, который установлен иа приводном валу 5. Привод смонтирован в приводпой коробке 28, прикрепленной к металлокоиструк11,ии 29 конвейера 30 так, что стрела / в рабочем положении находится над полотпом конвейера 30 и образует с иим необходимый угол для передачи с него груза на полотно конвейера 31, расположенного под углом к конвейеру 30.
Работа устройства заключается в следугощем.
При поступлении на конвейер 30 груза, который требуется передать на конвейер 31, иал атием кнопки «пуск иа пульте управления или по сигналу автоматической системы управления (иа фиг. 1-3 ие показаиы) включается электродвигатель 24, который через шкив 25, клиноременную передачу 26, шкиВ 27, приводной вал 5 и приводиой барабаи 4 приводит в движение бесконечно замкнутую ленту 2 поворотной стрелы /.
Одновременно с этим врашение электродвигателя 24, передаваемое через червяк 6, червячное колесо 7, горизОНтальный вал 8, конические шестерни 11 и 12, вал 13, кулачок 14, ролик 15, зубчатый сектор 16, зубчатый венец 20 и кронштейн 18 иоворачивает стрелу / в рабочее положение. Поворот стрелы, выдерживание ее в рабочем положении, а также возврат в исходное полол ение осушествляется в необходимый, строго заданный цикл времени и с мииимальной динамичиостью, что достигается соответствующим профилем кулачка 14, взаимодействующего с роликом 15 и с пружиной возврата 2/.
С началом вращения электродвигателя 24 кулачок Я поворачиваясь вместе с горизонтальным валом 8, выходит из взаимодействия
с бесконтактным датчиком W и, совершив нолпьй оборот вместе с валом 8, который соогйегствует одновременно совершаемому полному обороту кулачка 14, вновь входит во взаимодействие с бесконтактным датчиком 10, в результате чего последний отключает электродвигатель 24, чем заканчивается цикл работы устройства.
При необходимости адресования всего потока грузов с конвейера 30 только на один конвейер 3 рабочее положение иоворотной сгрелы У удерживается взаимодействием рычага 22 с электромагнитным фиксатором 23, включаемым нажатием кнопки «фиксатор на пульте управления (на фиг. 1-3 не показан).
Предмет и з о б р е т е f и я
1.Устройство для передачи штучных грузов с одного конвейера на другой, расположенных под углом друг к другу, содержащее щарнг.рно смонтированную поворотную в горизонтальной плоскости стрелу с бесконечно замкнутой лентой, огибающей вертикально расположенные барабаны, один из которых установлен на приводном валу, отличающееся тем, что, с целью создания определенного цикла времени на поворот стрелы в рабочее положение и обратно для возможности использоваиия устройства в автоматизированных сортировочных линиях, а также исключения необходимости реверса электродвигателя для возврата поворотной стрелы из рабочего положения в исходное и фиксации ее в этих положениях, иа приводном валу барабана установлен червяк, взаимодействующий с червячным колесом, посаженным на горизонтальном валу, снабженном коиической шестерней, находящейся в зацеплении с коиической шестерней, установленной на вертикальном валу, иа котором установлен фасонный кулачок, взаимодействующий с роликом, расположеииым на зубчатом секторе, закрепленном в опорах, причем на стреле посредством кронштейна жестко смонтирована подпружиненная втулка с зубчатым веицом, взаимодействующим с сектором.
2.Устройство по п. 1, отличающееся тем, что, с целью передачи всего потока грузов с одного коивейера на другой, на подпружиненной втулке закреплен рычаг, контактирующий с электромагиитиым фиксатором, удерживающим стрелу в рабочем положении.
3.Устройство по п. 1, отличающееся тем, что, с целью отключения электродвигателя гюсле поворота стрелы в рабочее положение ; обратно, на горизонтальном валу устаиовле -: кулачок, взаимодействующий с датчиком, сблокированным с приводом устройства.
4.Устройство по п. 1, отличающееся тем, что, с целью обеспечения сиятия ленты без разборки стрелы, последняя размещена между ветвями ленты.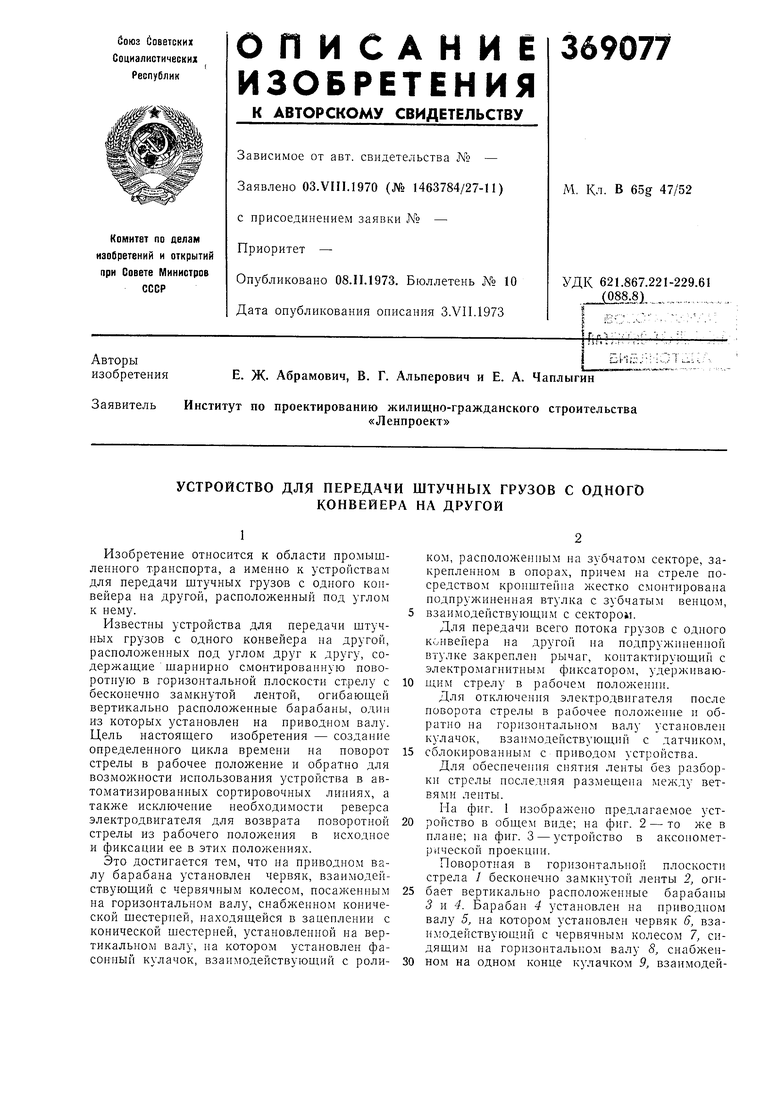
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ПЕРЕДАЧИ ГРУЗОВ С ОДНОГО КОНВЕЙЕРА НА ДРУГОЙ | 1968 |
|
SU213662A1 |
| СТАНОК ДЛЯ ШЛИФОВАНИЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ДЛИННОМЕРНОЙ ТРУБЫ | 1969 |
|
SU234179A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ГРУЗОВ | 1967 |
|
SU195363A1 |
| Станок для перевязки мотков либита | 1976 |
|
SU659668A1 |
| УСТРОЙСТВО для ОТМЕРИВАНИЯ ЗАДАННОЙ ДЛИНЫ ПОЛОТНА НА МАШИНЕ | 1967 |
|
SU200573A1 |
| Устройство для обвязки штучных изделий термопластичной лентой | 1977 |
|
SU697048A3 |
| Кантователь | 1973 |
|
SU475241A1 |
| Рабочий ротор | 1976 |
|
SU632457A1 |
| Намоточная головка | 1984 |
|
SU1277229A1 |
| ЛИФТ С НЕСКОЛЬКИМИ ПРИВОДНЫМИ ЛЕНТОЧНЫМИ БАРАБАНАМИ БЕЗ ПРОТИВОВЕСА И НИЖНИМ РАСПОЛОЖЕНИЕМ ПРИВОДА | 2000 |
|
RU2171218C1 |
31
25
иг j
