1
ИзабреТёНиё относится к области средств механизации внутрицеховых перегрузочных операций.
Известны перегрузочные устройства, предназначенные преимущественно для укладки штучных грузов, и содержащие последовательно соединенные между собой и управляемые раздельными гидравлическими цилиндрами параллелограммные четырехзвенпики, один из которых монтирован на неподвижном основании, а другой несет захватный орган.
В предлагаемой конструкции параллелограммные четырехзвенники соединены между собой с возможностью взаимного поворота, причем одна из тяг четырехзвенника захвата выполнена в виде коромысла, своим свободным концом связанного с установленным на неподвижном основании гидравлическим цилиндром управления.
Кроме того, предусматривается также возможность выполнения устройства с расположенной в зоне рабочего участка направляющей для несущего захватный орган звена параллелограммного четырехзвенника.
Подобное выполнение устройства повыщает его маневренность и обеспечивает горизонтальное перемещение захватного органа в пределах указанного участка.
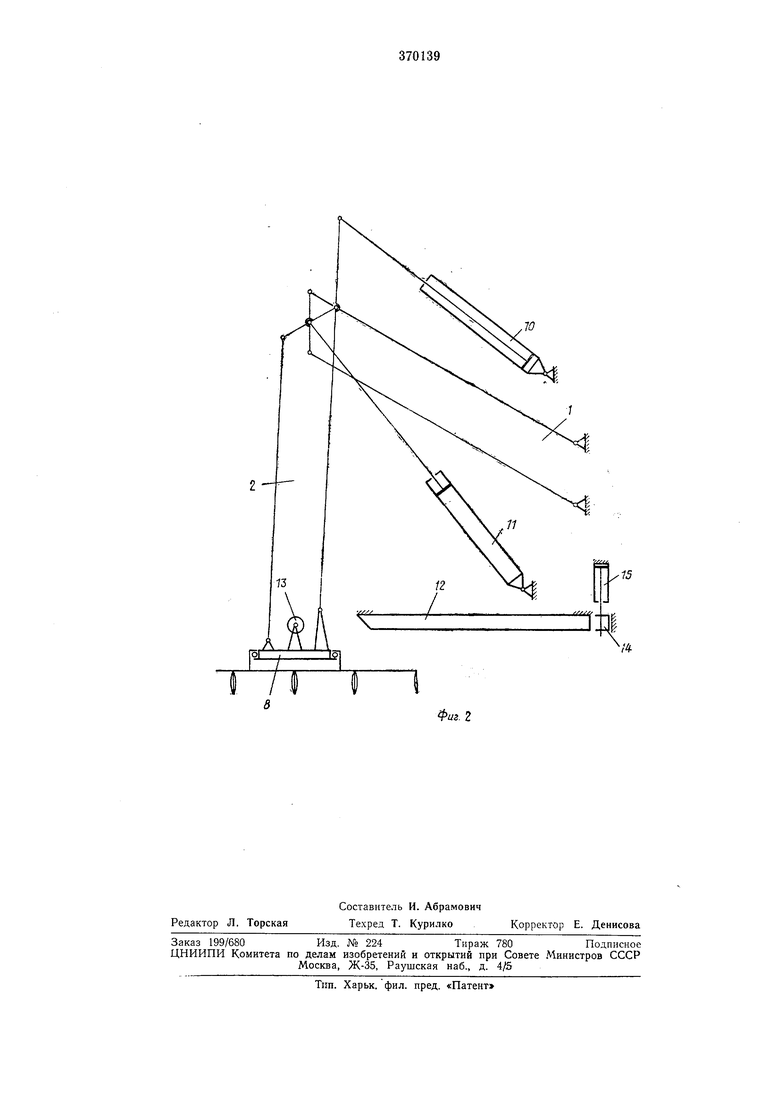
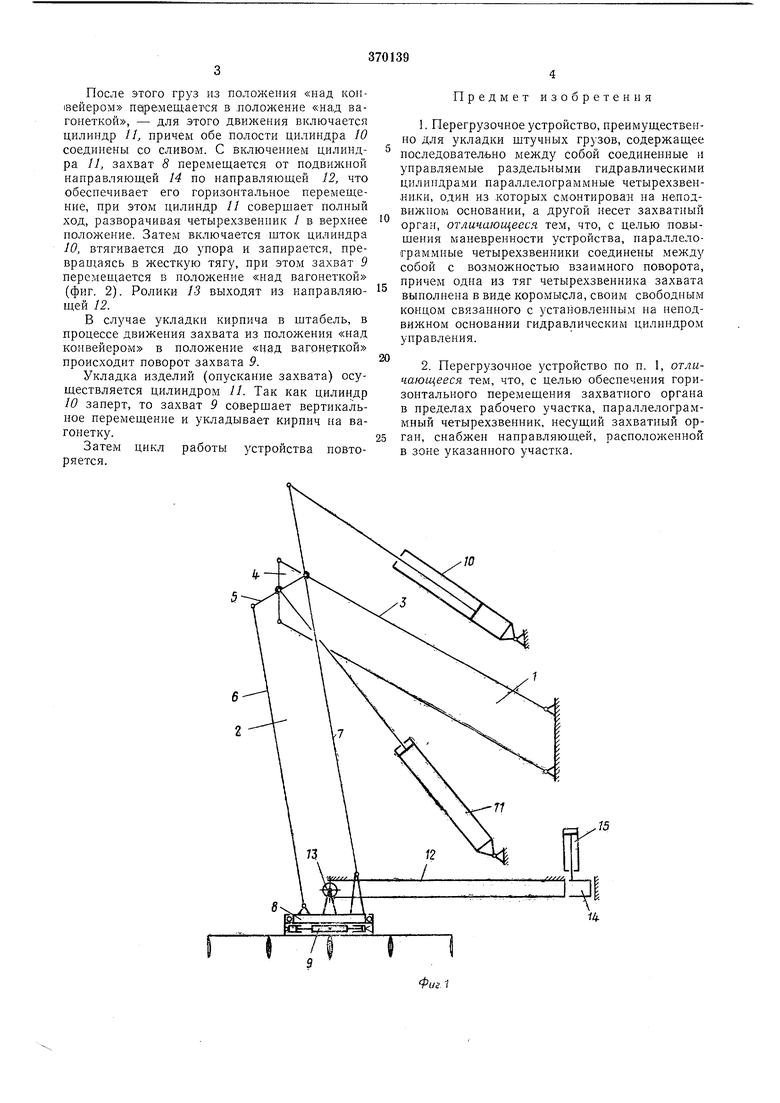
На фиг. 1 изображено устройство в положении выхода захвата из неподвижной направляющей; на фиг. 2 - устройство в положении над мостом разгрузки.
Устройство имеет щарнирные параллелограммные четырехзвенники / и 2. Четырехзвенник / имеет тяги 5 и поперечину 4, на которой щарнирно монтирована поперечина 5 четырехзвенника 2. Тяги 6 и 7 последнего несут раму 8 поворотного захвата 9, при этом тяга 7 выполнена в виде коро-мысла, свободный конец которого связан с гидравлическим цилиндром 10, укрепленным на осповании. Гидравлический цилиндр 11 подсоединен к поперечине 4.
Над рабочим участком размещена горизонталЬная направляющая 12, с которой может взаимодействовать ролик 13 рамы 8. Над подающим конвейером предусмотрен подъемный участок направляющей 14, перемещение которого осуществляется с помощью гидравлического цилиндра 15.
Работа устройства осуществляется в следующей последовательности.
Для забора изделий захват 9 опускается цилиндром 15, щток которого соединен с подвижной направляющей 14, причем в последней в данный момент находится ролик 13. В нижнем положении происходит захват кирпича с конвейера. При обратном ходе цилиндра 15 захват 9 с кирпичом занимает первоначальпое положение.
После этого груз из положения «над кои1вейером пе|рвмещаегся в лоложение «над вагонеткой, - для этого движения включается цилиндр 11, причем обе полости цилиндра 10 соединены со сливом. С включением цилиндра 11, захват 8 перемещается от подвижной направляющей 14 по направляющей 12, что обеспечивает его горизонтальное перемещение, при этом цилиндр // совершает полный ход, разворачивая четырехзвенпик / в верхнее положение. Затем включается шток цилиндра 10, втягивается до упора и запирается, превращаясь Б жесткую тягу, при этом захват 9 перемещается в положение «над вагонеткой (фиг. 2). Ролики 13 выходят из направляющей 12.
В случае укладки кирпича в штабель, в процессе движения захвата из положения «над конвейером в положение «над вагонеткой происходит поворот захвата 9.
Укладка изделий (опускание захвата) осуществляется цилиндром 11. Так как цилиндр 10 заперт, то захват 9 совершает вертикальное перемещение и укладывает кирпич на вагонетку.
Затем цикл работы устройства повторяется.
Предмет изобретения
1.Перегрузочное устройство, преимущественно для укладки штучных грузов, содержащее последовательно между собой соединенные и управляемые раздельными гидравлическими цилиндрами параллелограммные четырехзвен.ни,ки, один из .которых смонтирован на неподвижном основании, а другой несет захватный орган, отличающееся тем, что, с целью повышения маневренности устройства, параллелограммные четырехзвенники соединены между собой с возможностью взаимного поворота, причем одна из тяг четырехзвенника захвата выполнена в виде коромысла, своим свободным концом связанного с установленным на неподвижном основании гидравлическим цилиндром управления.
2.Перегрузочное устройство по п. 1, отличающееся тем, что, с целью обеспечения горизонтального перемещения захватного органа в пределах рабочего участка, параллелограммный четырехзвенник, несущий захватный орган, снабжен направляющей, расположенной в зоне указанного участка.
70
4
10
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Линия формирования садки сырца-кирпича на печную вагонетку | 1987 |
|
SU1412975A1 |
| Автоматическая линия формирования садки кирпича на печной вагонетке | 1983 |
|
SU1178604A1 |
| Перегрузочное устройство, преимущественно, для поточных линий | 1960 |
|
SU135405A1 |
| УСТАНОВКА ДЛЯ САДКИ СЫРЦЫ-КИРПИЧА НА ПЕЧНУЮ ВАГОНЕТКУ | 1992 |
|
RU2043192C1 |
| Устройство для захвата слоя штучных изделий | 1986 |
|
SU1382803A1 |
| ШТАБЕЛЕУКЛАДЧИК | 1965 |
|
SU174128A1 |
| Устройство для укладки штучных изделий | 1975 |
|
SU606727A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ГОРИЗОНТАЛЬНОГО СЛОЯ КИРПИЧА ПЕРЕД УКЛАДКОЙ ЕГО В ПАКЕТ — ТИПА «ЕЛОЧКА» | 1969 |
|
SU250695A1 |
| ГРУЗОЗАХВАТ-СТАЛКИВАТЕЛЬ К ПОГРУЗЧИКУ | 1996 |
|
RU2116958C1 |
| Устройство для укладки в штабель штучных изделий | 1958 |
|
SU119834A1 |