1
Изобретение относится к цифровым устройствам для определения положения объекта, с помощью которого измеряется перемещение подвижного элемента относительно неподвижного. Такое цифровое устройство включает счетчик, цифровое содержание которого, преобразованное в аналоговую форму, непрерывно срав ивается с аналоговой величиной, представляющей положение подвижного элемента в данный момент, в результате чего подается сигнал рассогласования, управляющий передачей импульсов счета счетчику.
В устройствах такого типа, т. е. когда подвижный элемент непрерывно перемещается, величина сигнала рассогласования зависит or скорости перемещения, так как система проявляет присущую ей инерцию, следуя за нроисходящими в, ней изменениями.
Известно устройство для определения положения объекта такого типа, в котором преобразователь информации из цифровой формы в аналоговую, получающий информацию от счетчика, включает точную секцию и грубую секцию, которые питают соответственно точную и грубую секции преобразователя перемещения. При этом последний устроен так, что имеет возможность непрерывно сравнивать данное положение подвижного элeмeнт с цифровым содержанием счетчика, преобразованным в аналоговую форму, с целью фор.мирования соответственно точных и грубых сигналов рассогласовання, которые через устройство управления управляют операцией счета соответственно точной и грубой секций
счетчика.
Однако такого рода цифровое устройство для определения положения требует две отдельные сервосистемы, чтобы управлять соответственно точной и грубой частью сигнала
рассогласования, причем эти сервосистемы получают общий входной сигнал в виде аналоговой величины, представляющей данное положение подвижного эле.ме1гга. Очевидно, что оборудование, требующее преобразователь на цифровой формы в аналоговую п измерительный трансформатор для точной секции, а также еще преобразователь из цифровой формы в аналоговую и один измерительный трансформатор для грубой секции,
является сложным и дорогостоящим.
Более того, в общеизвестной системе употребляются две различных частоты, чтобы питать соответственно точную и грубую секции, что еще более увеличивает сложность
оборудования, иотому что требуются делители собственной частоты для получения этих двух различных частот от одного осциллятора (генератора колебаний).
В предлагае.мом цифровом устройстве
упомянутый счетчик приспособлен к селективному функционированию с различными скоростями счета в зависимости от скорости перемещения нодвижного элемента.
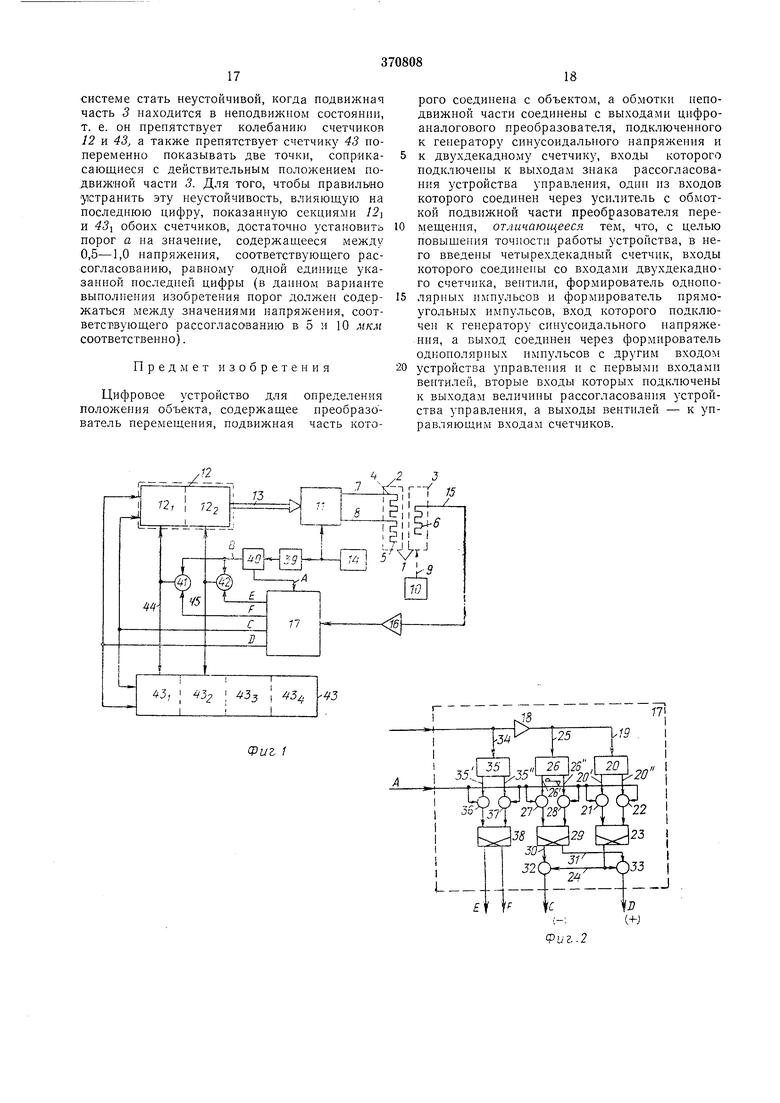
На фиг. 1 показана блок-схема контуров; на фиг. 2 - схема управляющего устройства, применяемого в преобразователе, показанном на фиг. 1; на фиг. 3 показано разделение по времени некоторых сигналов, имеющихся в преобразователе на фнг. 1.
При воплощении устройства, как это показано на фиг. 1, оно может измерить сдвиг подвижного элемента относительно заранее установленной исходной точки и дать цифровое выражение положения этого элемента.
Предлагаемое цифровое устройство применяется для определения положения объекта в системе, имеющей элемент, способный перемеи1,аться вдоль только одной осп перемещения. Однако совершенно ясно, что такая реализация изобретения может быть непосредственно применена для работы в системе, имеющей элемент, способный перемещаться вдоль двух или более осей или вокруг двух и более осей, так как достаточно дополнить систему отдельным цифровым устройство.м для определения положения такого типа, который будет описан для каждой из упомянутых осей.
Устройство включает трансформатор / в виде преобразователя перемещения, имеющий неподвижную часть 2, связанную с неподвижным элементом, например остовом оборудования, в котором упомянутый преобразователь применяется, и подвижную часть 3, скользящую, например, вдоль некоторой оси и прикрепленную к подвижному элементу данного оборудования. Преобразователь перемещелия может быть такого же типа, как и описанный в патенте США № 2,799,835. Он включает пару мпогополюсиых первичпых обмоток 4 и 5, сдвинутых по фазе в пространстве и соединенных с неподвижной частью 2, и многополюсную вторичную обмотку 6, прикрепленную к подвижной части 3. Общеизвестно, что в подобном преобразователе перемещения положение подвижной части относительно неподвижной может быть представлено относительным перемещением вторичной обмотки по отпощению к паре первичпых обмоток, причем это перемещение представляется в виде угла, измеренного в электрических градусах, а полюсное деление трех обмоток 4, 5 и 6, соответствующее 360 ЭЛ. град, равно известной величине, например 2 мм.
Определяющий положение трансформатор / непрерывно сравнивает поданные в апалоговой форме сигналы к его входным зажимам 7 и S с аналоговой величиной, поданной к входу 9 и представляющей данное полол ;ение подвижной части 5 и, следовательно, положение вторичной обмотки 6. Эта аналоговая величина передается подвижным элементом 10 оборудования, например салазками, снабженным реперным указателем и способным пе редвитаться вдоль ползунов в .некотором направлении. Если подвижный элемент 10 жестко соединен с подвижной частью 5 трансформатора /, аналоговая величина, поданная на вход 5, непосредственно представляет данное положение подвижного элемента 10 вдоль направления перемещения; ипаче говоря, подвижный эле.мент 10 может быть связан с подвижной частью 3 посредством механических средств передачи, и в этом случае аналоговая величина, поданная на вход 9, представляется данным положением подвижной части 3.
Трансформатор / соединен через входные зажимы 7 и 8 с преобразователем информации из цифровой формы в аналоговую //, который, в свою очередь, получает информацию от двухдекадного счетчика 12. Преобразователь 11 приспособлен к тому, чтобы преобразовывать цифровую 1П1формацию, которая передается, например, в двоичном коде и в параллельной форме на его входные зажимы через канал передачи 13, в аналоговую
информацию, представляемую с помощью синусоидальной и косинусоидальной функций электрического угла, выраженного упомянутой цифровой информацией; приче.м имеется в виду, что максимальное число, которое может быть представлено счетчиком 12, равно 360 эл. град., а полюсному делению обмоток 4, 5, 6 трансформатора 1.
В частности, преобразователь //, получая питание от синусоилТ.ального генератора 14,
имеющего, например, частоту 10 кгц, подает на вход 7, питающий неподвижную обмотку 4, синусоидальный сигнал. Последний имеет частоту 10 кгц и максимальную амплитуду, пропорциональную синусу данного угла. Преобразователь также подает синусоидальный сигнал, имеющий частоту 10 кгц и максимальную амплитуду, пропорциональную косинз су данюго угла, на выход 8, питающий неподвижную вторичпую
обмотку 5.
Преобразователь из цифровой формы в аналоговую может быть любого типа при условии, что составляющие его части подобраны так, чтобы время переключения, требуемое преобразователем для подачи на его выход апалогового выражения цифрового значения, поданного на его вход канала передачи 13 было достаточно непродолжительным по отношению к периоду колебаний генератора (например, 1/100). По этой причине переключатели, вмонтированные в указанный преобразователь и управляемые входом канала передачи 13, должны быть электронного типа, например, на транзисторах. (Причины такого
выбора и ограничение, от которого зависит выбор частоты для генератора 14, будут объяснены ниже).
Поэтому на выходном зажиме 15 трансформатора / получается сигнал, имеющий частоту 10 кгц и максимальную амплитуду, пропорциональную разности между настоящим положением подвижной части 3 и положением, выраженным цифровой информацией, содержащейся в настоящий момент в счетчике 12 со сдвигом по фазе либо в 90, либо в 270 эл. град, относительно сигнала генератора в зависимости от того, положителен или отрицателен знак указанной разности (см. фиг. 3, а ц б). На основании изложенного видно, что настоящее положение относится к каждому полюсному делению и что упомянутое число представляег положение в пределах одного полюсного деления.
Аналоговый сигнал рассогласования, поданный на выход 15 трансформатора через соответствующий усилитель j6, передается на устройство управления 17, приспособленное к управлению операцией счета счетчика 12, с тем, чтобы изменить содержащуюся в нем цифровую информацию и таким образом значительно приблизить к нулю указанный аналоговый сигнал рассогласования. Понятно, что сигнал рассогласования будет сведен к нулю, когда упо1мяпутая цифровая информация соответствует положению подвижной части 3.
Устройство управления 17 (см. фиг. 2) получает на свой входной зажим снгнал рассогласования и на основе этого сигнала выполняет три вида функции управления. Это устройство устанавливает: имеется или нет рассогласование; контролирует знак рассогласования; различает порядок величины упомянутого рассогласования, определяя (в случае описываемого особого устройства), представляет ли оно перемеп1ение, соответствуЕощее сотым долям или десятым частя.i полюсного , определяющего положение трансформатора /. Аналоговый сигнал рассогласовайтия, нринятый на входе устройства 17, через соответствуюнднй усилитель 18 нодается на входной зажим 19 порогового контура 20. который определяет уровень чувствительности по рассогласованию (см. фиг. 3, а) цифрового устройства для определения по.ложення объекта; причем пороговый контур приспособлен к тому, чтобы возбуждать ли-бо выход 20, либо выход 20 в соответствии с тем, выше или ниже уровня напряжения а порогового контура 20 максимальная амплитуда синусоидального напряжения, представляющего упомянутый сигнал рассогласования, поданный на вход 19. Сигналы с выходов 20 и 20 через вентили 21 и 22, управляемые сигналом времен1ЮГО переключепия Л, применяются соответственно для возбуждения и снятия возбуждения с бистабильного элемента 23, выполняющего функцию запоминания в течение каждого периода генератора /4 вне зависимости от того, было ли рассогласование или нет. Наличие сигнала рассогласования, превышающего порог а, обнаруживается возбуждением выхода 24 уномянутого бистабильпого элемента 23.
Выход усилителя 18 питает также вход 25 разделительной схемы 26, которая нрнспособлена к тому, чтобы подавать па выходы 26 и 26 положительные и соответственно отрицательные полуволны синусоидального напряжения, представляющего сигнал рассогласования.
Выходы 26 и 26 через вентили 27 и 28, которые контролнруются сигналом временного переключения А, применяются соответственно для возбуждения и снятия возбуждения с бистабильного элемента 29, выполняющего
функцию запоминания в течение каждого периода генератора 14, независимо от того, было ли напряжение сигнала рассогласования положительны.м или отрицательным. Присутствие положительного или отрицательного сигнала рассогласования обнаруживается активацией выходов 30 или 31 бистаблльного элемента 29.
Выходы 30 и 31 управляют соответственно схе.ма.мн «И 32 и 33, тогда как выход 24 бпстабильного элемента 23 управляет обеими схемами «И. Поэтому, если пороговый коптур 20 обнаруживает наличие рассогласования, (.при этом выход 24 бистабнльного элемента 23 будет соответствуюЩНм образом возбужден), либо выходной залчнм С схемы «И 32, либо выходной зажя1М D схемы «Н 33, будет возбужден, что зависит от того, был ли возбужден выход 30 или выход 31 бистабнльного .;га 29, т. е. в за13)1С1 мости от того,
какой у сигнала рассогласовалия - положительный отрицательнь:й. Более того, если пороговый контур 20 не обнаруживает рассогласования (при этом вы.ход 24 бистабильного элемента 23 соооветст1ве)П1ым образОМ обесточен), то ни один из ве} тилей 32 и 33 не окажется возбужденным.
Наконец аналоговый снгнал рассогласования непосредстве1 но передается от входного зажима ycTpoiicTBa управления 17 на входной
зажим 34 порогового контура ,, самого но себе известного, приспособленпого возбуждать либо свой выход 35, либо выход 35 в соответствии с тем, выше нли ннже велич115 а сигнала рассогласования, чем заранее установленный уровень порога Ь (см. фнг. 3, б). В частности пороговьи уровень oжeт быть выбран таким, чтобы равняться максимальной амплитуде синусоидального снгнала рассогласовання, которая соответствует 1/20 полюсного
деления, определяющего положение трансформатора /, а именно 0,1 мм в соответствии с рассматриваемым нами примером; таким образом пороговый контур 35 служит для того, чтобы различать рассогласовапня, соответствуюп1ие десятым долям полюсного деления, .и рассогласования, соответствующие сотым долям этого деления, возбуждая соответственно лнбо выход 35, либо выход 35. Эти выходы через вентнли 36 и 37, соответственно управляемые сигналом BpeMentioro переключения А, гштаются, чтобы возбуждать илн сннмать возбужденне бистабильного элемента 38. служащего для функции запоминания, в течение каждого периода генератора 14, независимо
от того, соответстзопала ли амплитуда рассогласования десятым или сотым частям полюсного деления, и таким образом возбуждающего либо выход Е, либо выход F.
Сигнал временного нереключення с выхода А состоит из серии импульсов, получаемых от генератора синусоидальных волн 14. Последний питает, помимо преобразователя 11 из цифровой формы в аналоговую, формирователь прямоугольных импульсов 39 (см. фиг. 1), который управляет формирователем однополярных импульсов 40, имеющим два выхода А к В. Формирователь однополярных импульсов 40 генерирует на выходе Л серию импульсов (см. фиг. 3, а и б), возникающих соответственно в точках, где прямоугольная волна, идущая от формирователя прямоугольных импульсов 39, пересекает нейтральную ось в нисходящем надра:влени,и; более того, тот же формирователь способен генерировать на выходе В (см. фиг. 3, а и б) серию импульсов, возникающих соответственно в точ;ках, где та же волиа, пода-нная на выход схемы формирования пря.1оуголы ых импульсов, пересекает нейтральную ось в восходящем направлении.
Как уже было указано, импульсы с выхода А управляют вентилями 21, 22, 27, 28, 36 и 37. В частности для каждого периода колебания, произведенного генератором М, генерируется стробимпульс на выходе Л; последний устанавливает момент, когда бистабильные элементы 23, 29 и 38 могут изменить свое состояние, причем это изменение таково, что либо возбуждает, либо снимает возбуждение с упо.мянутых бистабильных элементо в в зависимости от того, какой вентиль открыт - первый или второй в из слелчующих пар ве гтнлей - 2/ и 22, 27 и 28, 36 и 37.
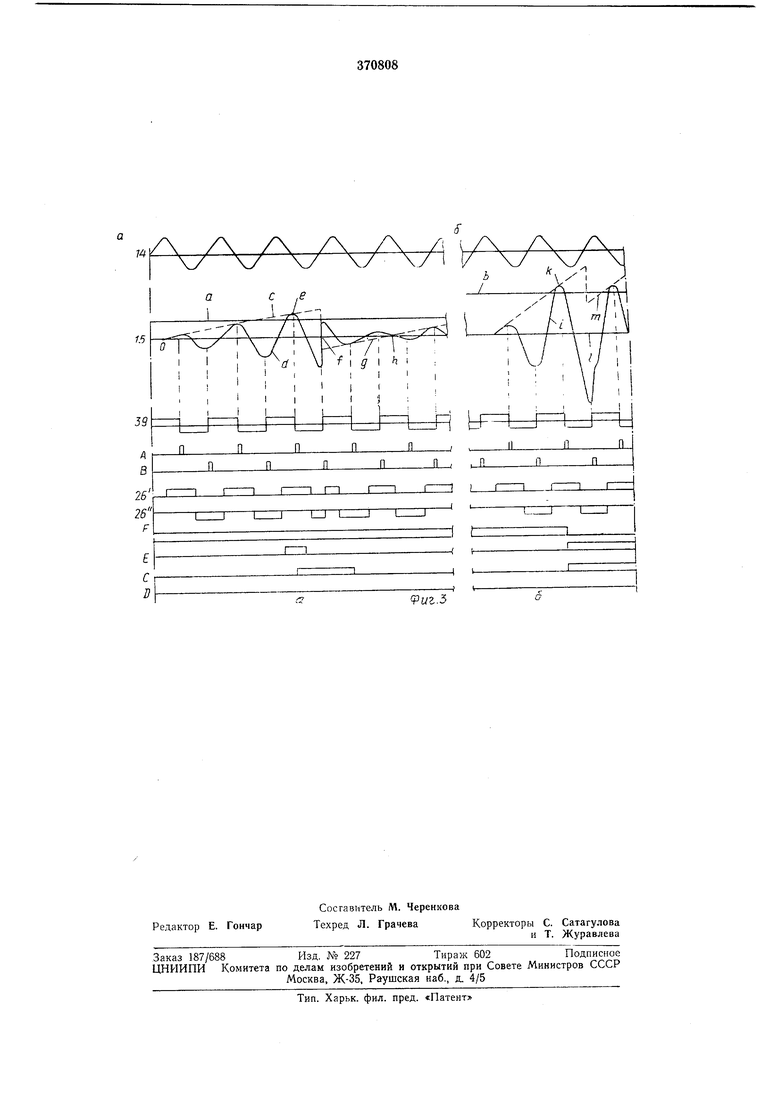
На фиг. 3, а и б показаны различные формы сигналов, возникающих на выходе генератора 14, определяющего положение трансформатора /, формирователя прямоугольных импульсов 39, формирователя однополярных импульсов 40, разделителя 26 и управляющего устройства 18 с соответствующим хронированием. В част1ности иа фиг. 3, а и б отображен положительный сигнал рассогласования 15, который в исходный момент сдвинут по фазе на 90° относительно сигнала генератора 14. Поэтому стробирующие имлульсы Л вначале находятся в фазе с положительными полуволнами сигнала рассогласования, воабуждающиМ.и выход 26 разделителя 26, посредством чего через вентиль 27 возбуждается бистабильный элемент 29.
В случае, противоположном тому, что показан на фиг. 3, т. е. если сигнал рассогласования 15 был бы отрицательным, стробирующие импульсы Л были бы в фазе с отрицательными полуволнами сигнала рассогласования, которые возбуждают выход 26 разделителя 26, посредством чего через вентиль 28 с бнстабильного элемента 29 было бы снято возбуждение.
Выходы С и D управляющего устройства.
селективно открытые описанным способом, питаются для того, чтобы позволить счетчику 12 соверщить операцию счета в прямом и соответствепно в обратном направлениях. Счетчнк 2 является счетчиком реверсивного типа, включающим множество декад, каждая из которых состоит из двоичного счетчика. Например, в реализации изобретения, представленной на фиг. 1, имеются две декады 12 и 12, представляющие соответственно сотые и десятые доли. Более того, указанные декады так взаимно связаны, что декада 12 отсчитывает счетные циклы декады I2i, иными словами, декада 12 питается счетным импульсом от предыдущей декады 12 после того, как последняя получила десять импульсов, что заставило ее выполнить полный счетный цикл.
Выходы Е к F устройства управления 17, возбулсденные селективным образом в соответствии с данным описанием, представляют собой два канала, управляющих соответственно открытием вентилей 4} и 42, которые управляют декадами /2, и 122 счетчика.
Импульсы счета, возбужденные на выходе В схемы 40, подаются на оба вентиля 41 и 42; через эти вентили и соответственно через каналы 43 и 44 импульсы передаются для селективного управления счетной операцией либо секции 12i, либо секции 122 в зависимости от того, какой из вентилей (41 или 42) возбудил устройство управления 17 через ка«алы Е или F. Поэтому для каждого периода колебания, возбужденного генератором 14, схема 40 подает импульс с выхода В, который управляет счетной операцией одной из декад счетчика 12 в соответствии с результатами операций управления, выполненными по сигналу рассогласования устройством управления 17 в момент, установленЕгый импульсом временного нереключе1 ия на выходе А, относящимся к тому же периоду. Для того чтобы импульс на выходе Л, передаваемый счетчику 12, мог бы быть эффективным и заставить этот счетчик произвести счетную операцию, весьма существенно, чтобы один из двух вентилей зстройства управления был бы открыт таким образом, чтобы обусловить функционирование счетчика для счетных операций в прямом или обратном направлениях.
Каждый эффективный импульс на выходе В вызывает изменение в цифровом содержании счетчика 12 и, следовательно, изменение аналоговых сигналов на выходах 7 и S преобразователя из цифровой формы в аналоговую 11. Теперь сигналы представляют соответственно синус- и косинус-функции нового цифрового числа, содержащегося в счетчике. Таким образом новый аналоговый сигнал рассогласования появится на выходе 15 трансформатора / и будет нo пpeжнeмy синусоидальным напряжением с частотой 10 кгц. максимальной амплитудой, пропорциональной разности между данным положением подвижной части 3 вдоль оси перемещения и положением, представленным новым цифровым числом, содержащимся в счетчике 12 ,и фазовым сдвигом в 90 или 270° относительно сигнала генератора 14 в соответствии с полярностью указанной разности.
Новый сигнал рассогласования через усилитель 16 нодается на вход устройства управления 17, которое анализирует этот сигнал, чтобы установить его амплитуду и его полярность и чтобы возбудить среди своих выходов ту пару выходов, которая характеризует новое состояние, с тем, чтобы она управляла счетной операцией счетчика 12 в том направлении и в той декаде, которые способны свести к нулю значение указанного рассогласования. Эти внутренние операции проис.ходят описанным образом, стремясь ввести систему в состояние равновесия. В частности, когда подвижная часть 3 останавливается, условие равновесия достигается при сигнале рассогласования, уровень которого ниже, чем пороговый уровень а, соответствующий чувствительности системы, при этом ни выход С, ии выход D не будут возбуждены. Таким образом счетчик 12, больше не настроенный для производства счетных операций, остается в таком состоянии все то время, в течение которого часть 3 остается неподвижной. В этом случае цифровая информация, передаваемая этим счетчиком, соответствует эффективному данному положению части 3 относительно части 2 в пределах полюсного деления с точностью, соответствующей пороговому уровню и чувствительности. В противополол ном случае, когда подвижная часть 3 находится в движении, внутренняя реакции системы, как было объяснено выше, должна позволить счетчику 12 содерл ать цифровую информацию, непрерывно соответствующую эффективному положению подвижной части 3. Этот результат достигается только в том случае, если переключения элементов, составляюн1,их систему, незначительно по отнощен:ию к периоду генератора 14. Итак, устройство управления 17 дискриминирует сигнал рассогласования по его полярности; более того, оно избирает выходы Е или F, предназначенные управлять операциями счета в двух различных декадах счетчика 12 в соответствии с тем, выще или ниже порогового уровня Ь величина указанного сигнала рассогласования. В рассматриваемом нами случае указанный, уровень порога равен величине рассогласования, представляющей 1/20 полюсного деления, т. е. 0,1 мм. Вообще счетчик может включать п декад (или других наименований в случае применения системы, отличной от применяемой в данном описании двоично-десятичной системы), таким образом взаимно связанных, что каждая декада отсчитывает счетные циклы, совершенные предшествующей декадой. Каждая декада может быть селективно управляема либо предшествующей декадой, либо соответствующим каналом, избранным указанным устройством унрав.пения в соответствии с упомянутым сигналом рассогласования. В этом случае унравляющее устройство
будет включать, п-1 схем, подобных схеме 35, каждая из них с различным пороговым уровнем, представляющим различный диапазон амплитуды сигнала рассогласования, п-1, схем должны быть соединены между собой так, чтобы упомянутое устройство управления .могло бы (различать яканалов, соответствующих диапазонам различной величины указанного сигнала рассогласования. Если, например, счетчик включает три декады, приспособленных соответственно к отсчету десятых, сотых и тысячных частей миллиметра, то устройство управления должно быть оборудовано двумя схема.ми, идентичными схеме 35 и имеющими пороговый уровень, равный амплитуде рассогласования, представляющей соответственно 1/200 и 1/20 полюсного деления, онределяющего положение трансформатора, относящегося к данному случаю, и устроено оно таким-образом, чтобы обладать тремя каналами, предназначенными управлять тремя декадами счетчика. Эти три канала соответственно возбуждаются сигналом рассогласования более низки.м, чем уровень первого порога или заключенного между уровнями упомянутых двух порогов, или более высоким, чем уровень упомянутого второго порога.
На фиг. 1 также показан четырехдекадный счетчик 43, который может состоять из любого числа декад, нанример из четырех декад 43, 432, 43, 43i, идентичных тем, что содержатся в счетчике 12, и взаимосвязанных так, чтобы был осуществлен реверсивный счетчик. Первые две декады 43 и 432 соответствуют иден5тичным декадам 12 и 12п счетчика 12, следовательно, они селективно управляются теми же каналами 44 п, соответственно, 45.
Декады 43, 43, 43 « 43 взаимосвязаны в виде цепи так, что каждая декада отсчитывает счетные циклы, соверщенные предществующей декадой; декады 43 и 43 управляются только предшествующей декадой, декада 43 может селективно управляться либо предществующей декадой 43, либо каналом 45, декада 43 управляется только каналом 44.
Направление счета счетчика 43 задается тем же путем, что и для счетчика 12, с помощью выходов С и D. Тогда как декады 43 и 43 отсчитывают (таким же образом, как декады 12 и 122 внутреннего счетчика) сотые и, соответственно, десятые части миллиметра, секции 43z и 43 отсчитывают единицы и, соответственно, десятки миллиметров, содержащихся в эффективном перемещении подвижной части 3.
Счетчик 43 помимо этого снабжен средствами для установки на нуль или для изменения своего цифрового содержания и, более того, для управления переменой знака отсчета в момент, когда счетная операция пересекает нулевую величину. Все эти операции могут быть произведены независимо от счетчика 12.
Функционирование цифрового устройства для определения положения во время его эксИ
плуатацки происходит следующим образом. Предположим, что подвижный элемент 10 представлен салазками, снабженными репермым yKa3aTevaeM и способными скользить по ползунам вдоль некоторого направления; причем салазки могут быть приведены в движение вручную или иным способом. Кроме того, предполагается, что недвижный элемент 3 жестко связан с салазками 10 и что независимый вход 9 питается аналоговой величиной, непосредственно представляющей положение салазок в настоящий момент. Более того, предполагается, что цифровое устройство для онределения положения используется для измерения размеров обрабатываемой вдоль упомянутого нанравлення детали. Первая операция состоит в том, что указатель на салазках устанавливается на одном краю той части детали, которую предстоит измерить. Воздействуя на средства возвращения в исходное положение, ликвидируют цифровое содержание счетчика 43, тогда как счетчик 12, в соответствии со своим собственным образом работы, дает указание о данном положении подвижной части 3 относительно неподвижной части 2 по отношению к величине полюсного деления. Последовательно салазки 10 перемещаются вплоть до совпадения указателя с другим краем измеряемой на обрабатываемой детали части. В этих условиях счетчик 43 показывает абсолютную цифровую величину и знак изме-ряемого размера, тогда как счетчик 12 даст цифровое указание о новом ноложении, достигнутом подвижной частью относнтельно неподвижного элемента всегда по отношению к размерам одного полюсного деления. Вообще, салазки 10 могут скользить с различной скоростью.
Рассмотрим работу устройства для определения положения, функцио ирующего со скоростжми неремещения, постояйшыми, но различными но величине.
На фиг. 3, а изображен временный график сигнала рассогласования, поданного на выход 15 определяющего положение трансформатора /, относящегося к низкой скорости перемещения. Уровень напряжения а представляет уровень нороговой схемы 20 (за исключением уснлення, нроизведенного усилителем 18), т. е., инымн словами, минимальное нанряжение рассогласования, к которому чувствительно управляющее устройство 17. Сигнал 46 является синусоидальным напряжением, имеющим частоту, идентичную частоте генератора 12 (10 кгц), отстающим на 90° для положительного рассогласования и имеющим амплитуду, модулируемую перемещением подвижного элемента 3, происходящим при низкой ностоянной скорости. Указанное перемещение вызывает синусоидальное изменение амнлитуды рассогласования в пределах каждого полюсного деления. Поэтому сигнал рассогласования может быть представлен временным гра12
J. , ,, sin ,
фиком, как функция Н-sin 2т;/,
где // - постоянная пронорцнональности, зависящая от отношения усиления между выходом генератора 14 и выходом 15 трансформатора /; у-скорость неремещбния нодвижр ой части 3; р-полюсное деление. При работе на малой скорости, например в даннол случае со скоростью 200, в течение интервала, соответствующего нескольким периодам колебания сигнала рассогласования может быть представлено с достаточной точностью
функцией НЕ---sin2ir/
5Р
На фиг. 3, а график С представляет модулирующую функцию Н-2п-t, генернруемую скольжением подвижной части 3, т. е. временной график, который мы получили бы для сигнала рассогласования, если бы преобразователь 11 из цифровой формы в аналоговую возбул дался непрерывным сигналом скорее, чем синусоидальным.
5 В соответствии со сделанным ранее предположением понятно, что цифровое содержание счетчика 12 должно соответствовать в каждый момент положению подвижной части 3 относительно неподвижной части 2 в ripe0 делах одного полюсного деления. Указанное положение выражено в десятых и сотых долях миллиметра цифрами, ноявляющимися в декадах 12 и 12 соответственно. Эти цифровые показания даны с точностью до чувствительности системы, которая в рассматриваемом нами примере равна 1/200 полюсного деления, т. е. 10 мкм.
Когда скольжение салазок 10 соверщается с постоянной низкой скоростью У (в данном
0 случае со скоростью меньше 100 .VLW/CUK) вдоль правилыюго направления перемещения, например, в положительном направлении, аналоговый сигнал рассогласования, возникающий на выходе 15 меняется соответственно графику d.
Когда синусоидальная величина превышает значение уровня норога d, схема 40 генерирует импульс временного переключения А, совпадающий но времени с первой положительной вершиной е, и устройство управления может правильно активировать выходы.
Последовательно, на полупериод позже, совпадая по времени с точкой /, схема 40 производит импульс счета на ныходе В, который через вентиль 41, открытый по каналу F, заставляет декады сотенных долей 12 и 43 произвести отсчет одного деления в прямом направлении.
Изменение цифрового содержания счетчика 12 производит через канал 13 изме 1ение
аналоговых сигналов на выходах 7 8 преобразователя из цифровой формы в аналоговую и, следовательно, изменение амплитуды сигнала рассогласования на выходе 15, определяющего положение трансформатора 1.
65 Предположение, ранее сделанное в отношении
13
преобразователя 11, т. е., что его установочное время мало по отношению к периоду генератора, позволяет рассматривать колебание величины амплитуды сигнала рассогласования, как мгновенное. Более того, предположение, что изменение цифрового содержания счетчика 12, происходящее при отсчете этим счетчиком одного деления в прямом направлении, такое, что оно определяет перемену знака указанного сигнала рассогласования и сокращение амплитуды до величины ниже уровня порога а, означает, что будет иметь место опрокидывание фазы на графике d в точке f. Поэтому модулирующая функция снова начнет расти, начиная с более низкого уровня, как это показано на графике g. График g подобен графику с и сдвинут по отношении к последнему на величину oh, :предста вляющую время, необходимое для подвижной части 3, перемещенной пр,и скорости Oi на расстояние, равное 1/200 полюсного деления, т. е. на 1/100 мм. В то время как салазки ,10 продолжают скользить в положительном направлении с постоянной скоростью DI, фун;кциони,роваиие продолжается описанным образом, nipnче-м ясно, что при передвижении подвижной части 3 на одну сотую полюсного деления декада /2 счетчиКа передвигается вперед на одно деление, а тогда, ,копда подвижная часть передвинута на 0,1 мм, декада 12 заставит декаду сдвинуться в прямом напра,влении на одно деление.
При тех же условиях скорость перемещения подвижной части 5 так низка, что счетчик 12, всегда управляемый счетными импульсами В через канал 44, способен функционировать правильным темпом, т. е. адаптировать свое цифровое содержание к действительному положению упомянутой подвижной части. Если же скорость перемещения салазок 10 достаточно высока (в рассматриваемом случае / //200 Uj pf/2Q), условия функционирования системы меняются (см. фиг. 3, б) и сигнал рассогласования, появляющийся на выходе /. трансформатора /, может быть выражен функцией Н Sin для временного интервала, который короче, чем два периода колебания, что показано графиком i. График /
представляет модулирующую функцию Я
генерируемую перемещением подвижной части 3, т. е. временной график, который получился бы, если преобразо:ваталь 11 цифровой формы в аналоговую возбуждался непрерывным сигналом скорее, чем синусоидальным. Уровень напряжения b представляет пороговый уровень схемы 35, т. е. напряжение рассогласования, выще которого устройство управления избирает канал Е.
Таким образом, при скольжении салазок 10 с постоянной и больщой скоростью U2 (например, 0,9 ) вдоль правильного направления перемещения, например в положитель14
НОМ направлении, аналоговый сигнал рассогласования, появляющийся на выходе 15, изменяется в соответствии с графиком i. Когда синусоидальная величина превыщает пороговый уровень Ь, схема 40 генерирует импульсы временного переключения Л в соответствии с первой положительной вершиной k и устройство управления может тогда правильно возбудить каналы С и . Последовательно, поз0же на полупериод в соответствии с моментом е, схема 40 производит счетный импульс В, который через вентиль 42, открытый по выходу Е, заставляет декады десятых долей 122 и 442 произвести отсчет одного деления в пря5мом направлении.
Изменение цифрового содержания счетчика 12 производит через передаточный канал 13 изменение аналоговых сигналов, появляющихся на выходах 7 и 8 преобразователя из циф0ровой формы в аналоговую, и, следовательно, мгновенное изменение амплитуды сигнала рассогласования, возникающего на выходе /5 определяющего положение трансформатора, таким образом, как это было описано для мед5ленного перемещения. Соответствующее фиг. 3, б предположение, что указанное изменение цифрового содержания счетчика 12 при отсчете последним одного деления в прямом направлении таково, что оно уменьшает величи0ну указанного рассогласования до более низкого значения, чем уровень порога Ь, означает, что модулирующая функция начнет возрастать в момент /, начиная с более низкого уровня, как это показано на графике т, который по5добен графику /, но смещен по отношению к нему на величину, зависящую от остаточного рассогласования в момент переключения /.
В то время как перемещение салазок 10 продолжается в положительном направлении
0 с постоянной скоростью V2, функционирование системы продолжается описанным образом, причем ясно, что всякий раз, когда подвижная часть 3 передвигается на одну десятую миллиметра, декада 12 счетчика 12 отсчитывает
5 одно деление в прямом направлении под управлением счетных импульсов с выхода В, поданных с выхода Е на линию 45.
При этом счетная скорость счетчика 12 достаточно высока, чтобы последний функциони0ровал соответствующим темпом, т. е. чтобы его цифровое содержание могло бы следовать за действительным положением упомянутой подвижной части.
Из приведенного описания становится совершенно ясно, что две различных амплитуды сигнала рассогласования соответствуют двум разным скоростям перемещения о, и V2 подвижной части. Это позволяет устройству управлепия 17 автоматически избирать два различных выхода F или Е для управления счетными операциями счетчика 12.
Таким образом очевидно, что счетчик 12 может селективно функционировать на двух разных скоростях счета, соответствующих двум
5 разным скоростям, с которыми Г5ход 9 может
15
-быть возбужден. Обе эти различные счетные скорости могут быть получены известным путем: селективной подачей счетных импульсов В соответственной декаде счетчика через соответственный канал.
Максимально допустимая скорость для перемещения подвижной части 3 равняется jof/20 (что соответствует скорости 1 м/сек в предлагаемом варианте), т.е. скорости, при которой переключения модулирующей функции сигнала рассогласования имеет ту же частоту, что и генератор; при этом счетчик все еще может работать в том же темпе и производить счетные операции. Подходящий предел для упомянутой скорости можно установить, например, с помощью тор-моза, вступающего в действие при максимально допустимой скорости.
Более высокая скорость может быть получена просто увеличением частоты f генератора или увеличением деления, определяющего положение трансформатора. По этим причинам частота генератора должна быть выбрана в связи с делением определяющего положение трансформатора У и с максимально допустимой скоростью перемещения. Во всяком случае увеличение частоты / имеет предел, определяемый временем переключения элементов, составляющих систему.
Соображения, высказанные относительно счетчика 12, могут быть применены к счетчику 43, так как декады 43 и 432 точно соответству ют декадам 12i и, соответствевно, 122, в то время, когда декады 43 и 43, представляющие грубую секцию счетчика 43, производят отсчет под управлением точной секции, представленной декадами 43i и 43. Помимо этого, счетчик 43 снабжен приспособлениями, позволяющимн производить, например вручную, онерацин но возврату в исходное положение или сдвигу, и средствами для автоматического изменения деления отсчета, когда отсчет пересекает нуль; причем указанный счетчик может функционировать как абсолютный или дифференциальный. Поэтому в предлагаемом устройстве для определения положения возможны следующие операции: сдвиг исходной точки и изменение положительного направления оси для постоянного отсчета в прямом направлении без необходимости переполнения содержания внешнего счетчика.
Счетчик 43 позволяет устаиовить приспособление для онределения положения в любое предществующее положение с достаточной точностью и без потерь времени, даже после длительного периода времени или после неполадок в подаче тока, т. е. в тех случаях, когда цифровое содержание указанного счетчика разрушено. Действительно, предполагая, что иеподвижиая часть определяющего положение трансформатора снабжена исходной точкой абсолютного отсчета, представляющей абсолютное нулевое положение оборудования, и, помимо этого, предполагая, что возможно определить с помощью соответствующих средств
16
положение в плане по прямой подвижной части относительно этой нулевой точки, возможно и-повторение установки подвижной части в заранее установленной точке, отстоящей на известном расстоянии от исходной точки абсолютного отсчета. Это возможно при выполнении следующей оиерации. Сиачала указатель подвижной части совмещают с точкой абсолютного отсчета, а счетчик 44 возвращается в исходное положение, затем подвижная часть перемещается в направлении, указанном знаком положения, которое должно быть достигнуто, пока счетчик 43 не покажет цифровое значение, соответствующее упомянутому известному расстоянию. С другой стороны, если положение заранее установленной точки дается посредством ее расстояния относительно исходной точки, координаты которой относительно абсолютной точки отсчета известны, тогда описанная процедура должна быть сначала новторена таким образом, чтобы установить подвижную часть на относительиую исходную точку; когда это достигнуто, счетчик 43 снова возвращается в исходное положение. После этого подвижный элемент перемещается в направлении, указанном знаком ноложения, которое следует достигнуть, пока счетчик не даст цифровое указание, соответствующее указаиному относительному расстоянию.
Точность определения положения подвижной части устройства для определения положения по данному изобретению может быть улучшена известным образом, например путем измерения в аналоговой форме соответствующими средствами остаточного рассогласования, если таковое еще имеется на выходе 15, когда система находятся в своем состоянии равновесия; причем упомянутое рассогласование имеет значение ниже, чем уровень чувствительности данной систел ы.
Следует отметить, что д.1Я качественного функционирования устройства для определения положения требуется принять некоторые меры, чтобы обеспечить правильную инверсию знаков в счетчике 12 или 44. В частности декада десятых долей D должна оставаться обесточенной на короткое время вблизи нуля и одновременно декада сотенных долей должна оставаться возбужденной, чтобы дать возможность декадам l2i и 431 отсчитывать в обратном иаиравлении (к нулю) до того, как произойдет инверсия знака в счетчике.
В отличие от известных устройств предлагаемое устройство является более простым, так как оно требует только одну сервосистему, селективно чувствительную к двум эксплуатационным скоростям; кроме этого, для обнаружения как грубого, так и точного сигнала рассогласования используется толька один определяющий положение трансформатор, и только один преобразователь из цифровой в аналоговую форму требуется для питания упомянутого счетчика. Паконец, наличие порога чувствительности а препятствует
17
системе стать неустойчивой, когда подвижная часть 3 находится в неподвижном состоянии, т. е. он препятствует колебанию счетчиков 12 и 43, а также препятствует счетчику 43 попеременно показывать две точки, соприкасающиеся с действительным положением подвижной части 3. Для того, чтобы правильно устранить эту неустойчивость, влияющую на последнюю цифру, показанную секциями 12 и 45 обоих счетчиков, достаточно установить порог а на значение, содержащееся между 0,5-1,0 напряжения, соответствующего рассогласованию, равному одной единице указанной последней цифры (в данном варианте выполнения изобретения порог должен содержаться между значениями напряжения, соответст вующего рассогласо ванию в 5 и 10 мкм соответственно).
Предмет изобретения
Цифровое устройство для определения положения объекта, содержащее преобразователь перемещения, подвижная часть кото18
рого соединена с объектом, а обмотки неподвижной части соединены с выходами цифроаналогового преобразователя, подключенного к генератору синусоидального напряжения и к двухдекадному счетчику, входы которого подключены к выходам знака рассогласования устройства управления, один из входов которого соединен через усилитель с обмоткой подвижной части преобразователя перемещения, отличающееся тем, что, с целью повышения точности работы устройства, в него введены четырехдекадный счетчик, входы которого соединены со входами двухдекадного счетчика, вентили, формирователь однополярных импульсов и формирователь прямоугольных импульсов, вход которого подключен к генератору синусоидального напряжения, а выход соединен через формирователь однополярных импульсов с другим входом
устройства управления и с первыми входами вентилей, вторые входы которых подключены к выходам величины рассогласования устройства управления, а выходы вентилей - к управляющим входам счетчиков.

| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1987 |
|
SU1425832A1 |
| Регулятор реактивной мощности | 1985 |
|
SU1319010A1 |
| Двухотчетный преобразователь углового перемещения в цифровой код | 1975 |
|
SU526932A1 |
| Устройство для управления многоканальным электроприводом тренажера | 1984 |
|
SU1180846A1 |
| Устройство для измерения линейных перемещений | 1982 |
|
SU1070426A1 |
| Устройство для позиционного управления приводом перемещения объекта | 1985 |
|
SU1287106A1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1411977A1 |
| Преобразователь перемещений в код | 1978 |
|
SU746652A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДАМИ АНТЕННОГО ПОСТА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2587715C1 |
| Устройство для считывания графической информации | 1987 |
|
SU1564661A1 |
ф1/г.2 Фиг.З /
