1
Изобретение относится к области стаНКОстроения и может быть использовано для.автоматической балансировки шлифовального круга при его вращении..
Известны , устройства для автом;атической балансировки шлифовального круга при его вращении, содержащие датчик яеуравновещенности, размещаемый на корпусе щпивделя балансируемого круга, усилитель, которого включен датчик, стробоскопический осветитель, включенный на выхюде. усилителя, фотоэлемент, расположенный в зоне луча осветителя, установленный подвижно о.тНОсительно шпинделя балансируемого круга компенсирующий груз и механизм перемещения |Груза.-.. .:
Иедостаток известных устройств состоит. :В том, что они не имеют специальных элементов, -обеспечивающих выбор необходимого радиального перемещения компенсирующего |Груза, что .приводит к появлению значитея.ь|Ных вибраций шпинделя при его уравновещивании и тем самым снижает надежность ра|боты.устройства. .., . - .: . ,,
Предлагаемое, устройство; отличается от-известных .тем, .что на. компенсирующем inpiyae .выполнены две . взаимно .перпендикулярные лрорези, а. .механизм ..пер,емещения--1|рузаi :вылолнен в виде- кинематически,, гсвяаанных.со .шпинделем двух установленных коаксиально
шпинделю валиков, на торце одного из кото.рых диаметрально противоположно уетанов.лены,два пальца,„а на торце другого эксцентрично, оси валика - один пал:ец, в,займодей,ствующие с прорезями груза, и , установленных на корпусе щпинделя с возможностью вращения и кинематически связанных, :с,: валиками двух дисков, на :,одном из.;:которы-х, .связанном с валиком с двумя пальдами, вы.полнены две радиально : направленные: щелевидные прорези, .находящиеся в одной ,. пло.скости с ,пальцами валика, :на другомсдиске, связанном с валиком с одним палъцем,, вылолнена сегментная в, лол;к,руга opopesbj .а стробоскопический осветитель расположен
между дисками. .,, : ., - - .,-, .:,;Г -,;.
Эти отличия, позволяют полностью автом-атизировать,процесс б.алансировки круга и повысить надежность работы устройства.
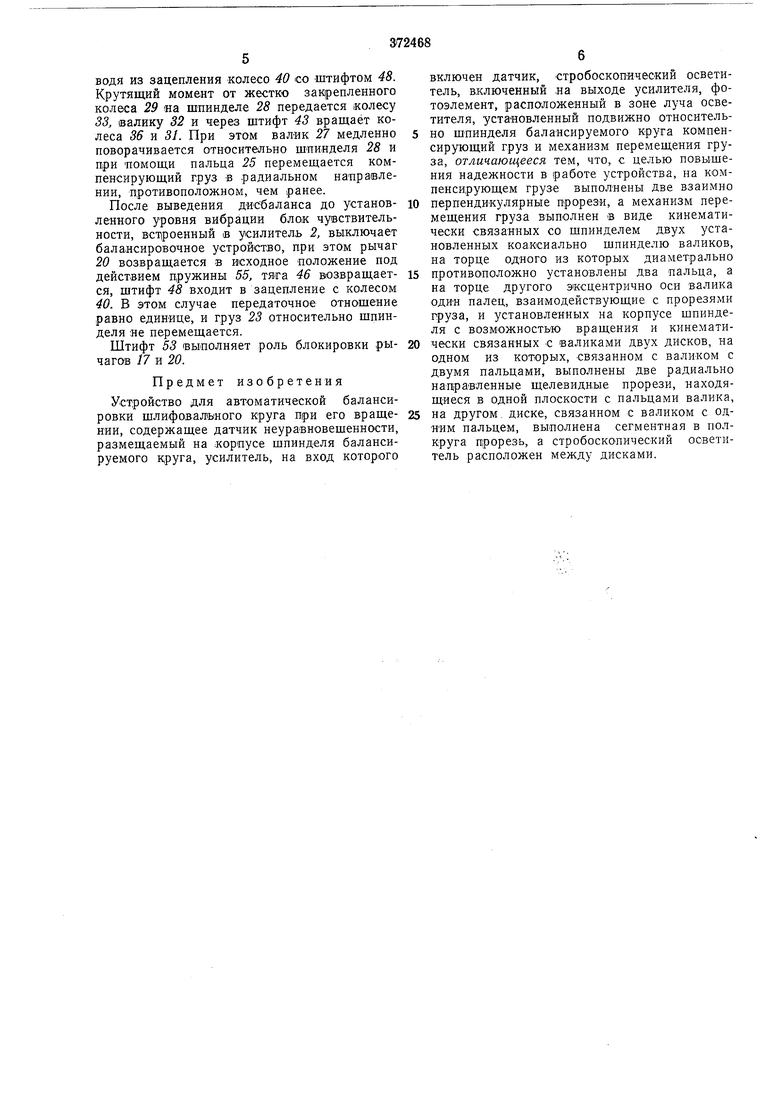
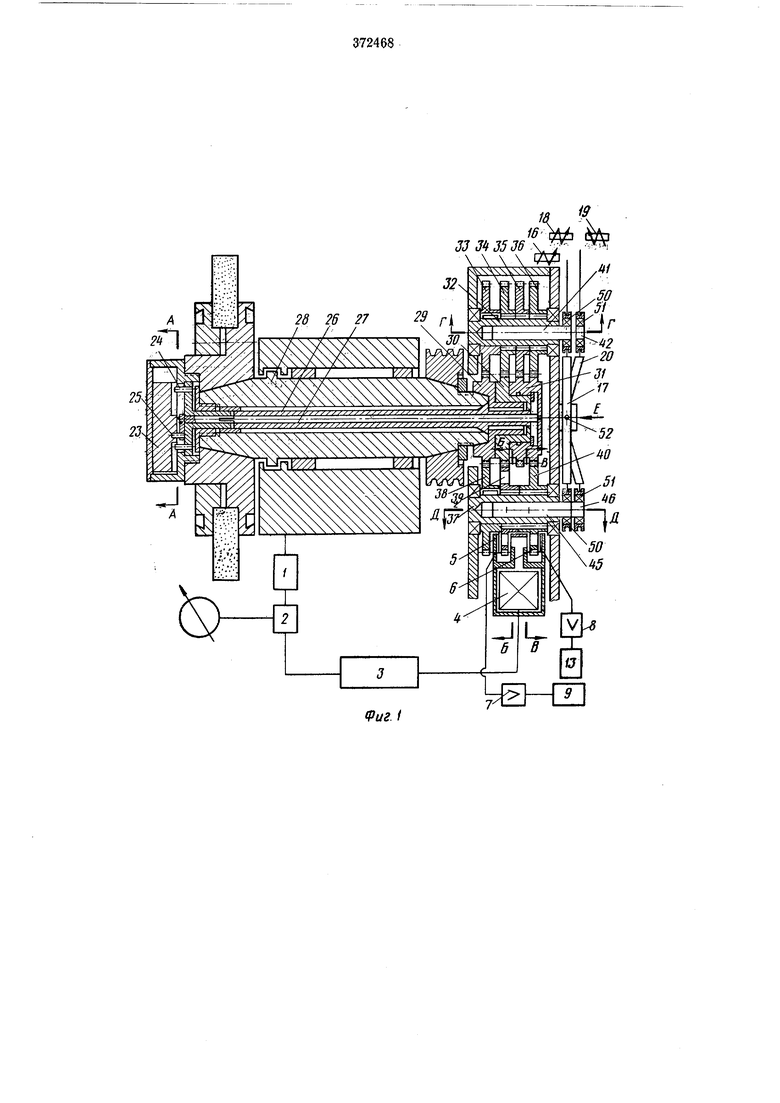
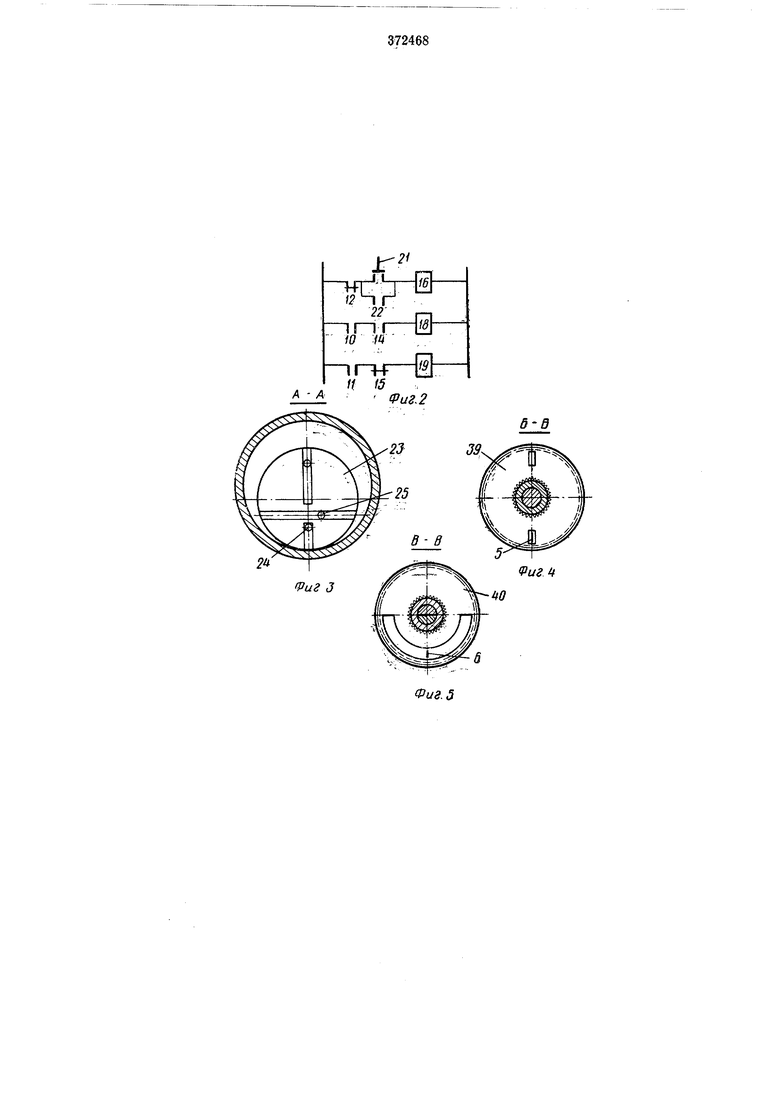
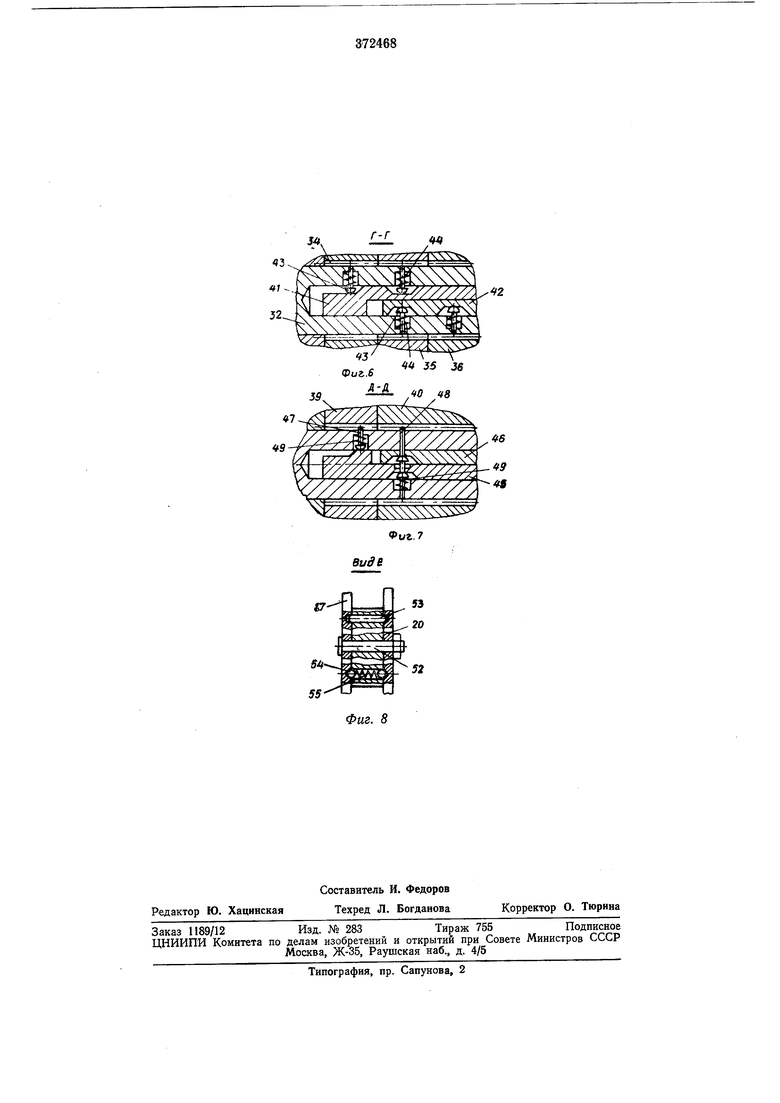
На фиг. 1 изображено-описываем:ое устройство, вид сбоку; на ф.иг. 2:-электрическая .схема включения,-.электромагнитов; на фйГ. .3- разрез по ня фит. 1,; в а фиг. 4:-т-фазрез до Б - Б да фиг..:. Ь: н.а фиг.:-5 фазрез по Р - В на фиг. 1;:на.фиг. 6 - разрез,:по Г - Г а фиг. 1; -на ф.иг.-7:тг-.разре.з .Д--Д на ,фиг. 1; на фиг. 8-вид пю .стрелке на фиг. 1.
Устройство,- для-- автоматической балансировки шлифовального круга включает датчик
неуравновешенности 1, воспринимающий сигналы дисбаланса круга, усилитель 2, формирователь импульсов 3, стробоскопический осветитель 4, фотоэлемент 5, подающий команду на прекращение вращения компенсирующего груза, фотоэлемент 6, дающий команду на радиальное перемещение компеноирующаго груза в одном направлении, два усилителя 7 и 8 сигналов фотоэлементов 5 и 6, реле контактов 9, имеющее два нормально открытых контакта 10 и 11 и один нормально закрытый контакт 12 реле контактов 13, имеющее один нормально -открытый контакт 14 и один нормально закрытый контакт 15 (фиг. 2), электромагнит 16, воздействующий на рычаг 17, электромагниты 18 и 19, воздействующие на рычаг 20, кнопку 21 включения балансирования (фиг. 2), нормально открытый контакт 22 бло1ка порога чувствительности в усилителе 2, компенсирующий груз 23, имеющий две взаимно перпендикулярные п|рорези, два пальца 24, и один палец 25, входящие в прорезь компенсирующего груза 23, один полый валик 26, несущий два пальца 24, валик 27, несущий палец 25, валик 26, несущий два пальца 24, валик 27, несущий палец 25, шпиндель 28, в отверстии которого коаксиально установлены валики 26 и 27, колесо 29, имеющее Z-1 зубьев и жестко связанное со шпинделем 28 колесо 30, имеющее Z зубьев и неподвижно связанное с валиком 26 колесо 31, имеющее два венца с числом зубьев Z и Z-2 и неподвижно связанное с валиком 27, валик 32 с внутренним отверстием, колесо 33 с числом зубьев Z, непоцвижно связанное с валиком 32, колесо 34 с числом зубьев Z+1 и внутренним зубчатым венцом, колесо 35 с числом зубьев Z+1 и внутренним зубчатым венцом, колесо 36 с числом зубьев Z-/ и внутренним венцом, валик 57 с внутренним отверстием, коле-ро 38 с числом зубьев Z-/ и неподвижно связанное с валиком 37, колесо 39 с числом зубьев Z « внутренним зубчатым венцом и имеющее две радиальные прорези, колесо 40 с числом зубьев Z и внутренним зубчатым венцом и имеющее одну сегментную в полкруга прорезь (фиг. 5), тягу 41, входящую в отверстие валика 32 и имеющую две гнездовые прорези, тягу 42, входящую в отверстие валика 32 и имеющую две гнездовые прорези, щтифты 43, имеющие острые углы, входящие во внутренние зубчатые венцы колес 34, 35 и 36, пружины 44, прижимающие щтифты 43 к тягам 41 и 42, тягу 45, имеющую две гнездовые прарези, тягу 46, имеющую одну гнездовую прорезь и сквозное отверстие, штифты 47 и 48, имеющие острые углы, входящие во внутренние зубчатые венцы колес 39 и 40, пружины 49, прижимающие штифты 47 и 48 к тягам 45 и 46, ПОДШИПНИКИ 50, соединяющие тяги 41 и 45 с рычагом 17, подшипники 51, соеди«яюющие тяги 42 и 46 с рычагом 20, ось 52, на которой вращаются рычаги 17 и 20, блокирующий штифт 55, входящий в гнезда рычагов/7
и 20, щарики 54, дружины 55, возвращающие рычаги 17 и 20 ъ исходное положение.
Устройство работает следующим образом.
Сигналы датчика неуравновещенности усиливаются усилителем 2 и подаются в формирователь импульсов 3 и стробоскопический осветитель 4, который указывает угловую координату неуравновешенности круга и подает команду на радиальное перемещение компенсирующего груза 23.
Команда на балансировку шлифовального круга подается нажатием кнопки 21 вручную или автоматически от блока порога чувствительности, встроенного в усилитель 2, который При достижении установленного уровня вибрации соединяет нормально открытые контакты 14. При этом включается электромагнит 16, который через рычаг 17 перемещает тягу 41, тягу 25 и вводит штифты 43 в зацепление с колесами 34 и 55. Крутящий момент от жестко закрепленного колеса 29 на шпинделе 28 передается колесу 55, валику 52 и через щтифты 43 вращает колеса 34 к 35 ti колеса 30 и 31. При этом медленно поворачиваются валики 26 и 27 относительно шпинделя 28. Валики 26 и 27 через пальцы 24 и 25 поворачивают компенсирующий груз 23 до такого положения, пока луч стробоскопического осветителя 4 через щель комса 39 на фотоэлемент 5, который через усилитель 7 подает команду реле Я и нормально закрытый контакт 12 открывается, а нормально открытые контакты 10 и 11 закрываются. В результате этого подготавливается цепь для включения электромагнитов 18 или 19, а электромагнит 16 обесточивается. Рычаг 17 под воздействием пружииы 55 возвращается в исходное положение, одновременно перемещая тяги 41 и 45 и вводя в зацепление колеса 39 к 40 со штифтами 47 и 48 и выводят штифты 43 из зацепления с колесами 34 и 55. В этом случае кинематическая цепь имеет передаточное отношение, равное единице, и груз 23 относительно шпинделя 28 не вращается.
При таком положении схемы при освещенном фотоэлементе 6 импульс с его выхода через усилитель 8 передается реле 13, которое замыкает нормально открытый контакт 14 и размыкает нормально закрытый контакт 15, включая электромагнит 18, который притягивает рычаг 20, перемещающий тяги 42 и 46, вводя в зацепление штифт 43 с колесом 55 и выводя «3 зацепления колесо 40 со штифтом 48. Крутящий момент от жестко закрепленного колеса 29 на шпинделе 28 передается колесу 55, валику 32 и через штифт 43 врашает колесо 55 и 31. При этом валик медленно поворачивается относительно шпинделя 28 и через палец 25 перемещает компенсиру ющий груз 23 в радиальном направлении. При не освещенном фотоэлементе 6 включается электромагнит 19 по ранее подготовленной цепи и притягивает рычаг 20, который пе ремещает тяги 42 и 46, В1водя з зацепления штифт 43 с колесом 36 и выводя из зацепления колесо 40 со штифтом 48. Крутящий момент от жестко закрепленного колеса 29 на шпинделе 28 передается колесу 33, валику 32 и через штифт 43 вращает колеса 36 и 31. При этом валик 27 медленно поворачивается относительно шпинделя 28 и при ПОМОЩИ пальца 25 перемещается компенсирующий груз в .радиальном направлении, противоположном, чем ранее. После выведения дис баланса до установленного уровня вибрации блок чувствительности, вст|роенный в усилитель 2, выключает балансировочное устройство, при этом рычаг 20 возвращается в исходное положение под действием пружины 55, тяга 46 возвращается, штифт 48 входит в зацепление с колесом 40. В этом случае передаточное отношение равно единице, и груз 23 относительно шпинделя не перемещается. Штифт 53 выполняет роль блокировки рычагов 17 и 20. Предмет изобретения Устройство для автоматической балансировки шлифовал1Ьного круга при его вращении, содержащее датчик неуравновешенности, размещаемый на .корпусе шпинделя балансируемого Kipyra, усилитель, на вход которого включен датчик, стробоскопический осветитель, включенный на выходе усилителя, фотоэлемент, расположенный в зоне луча осветителя, установленный подвижно относительно шпинделя балансируемого круга компенсирующий груз и механизм перемещения груза, отличающееся тем, что, с целью повышения надежности в (работе устройства, на компенсирующем грузе выполнены две взаимно перпендикулярные прорези, а механизм перемещения груза выполнен ® виде кинематически связанных со шпинделем двух установленных коаксиально шпинделю валиков, на торце одного из которых диаметрально противоположно установлены два пальца, а на торце другого эксцентрично оси валика один палец, взаимодействующие с прорезями груза, и установленных на корпусе шпинделя с возможностью вращения и кинематически связанных с валиками двух дисков, на одном из которых, связанном с валиком с двумя пальцами, выполнены две радиально направленные щелевидные прорези, находящиеся в одной плоскости с пальцами валика, на другом, диске, связанном с валиком с одним пальцем, выполнена сегментная в нолкруга прорезь, а стробоскопический осветитель расположен между дисками.
33 3it3536
-irni-IM
УО .14
ли -5
1Г-нН
d-d
v
Ф.г.5 «
Жчччч ;:
.NJ to 48
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для балансировки шлифовального круга | 1971 |
|
SU506774A1 |
| УСТРОЙСТВО для БАЛАНСИРОВКИ ШЛИФОВАЛЬНОГО | 1973 |
|
SU364851A1 |
| Устройство для балансировки изделия | 1974 |
|
SU669834A1 |
| УСТРОЙСТВО для БАЛАНСИРОВКИ ШЛИФОВАЛЬНЫХ КРУГОВ | 1972 |
|
SU345396A1 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ ШЛИФОВАЛЬНЫХ КРУГОВ | 1969 |
|
SU415638A1 |
| Счетная машина | 1928 |
|
SU13284A1 |
| АВТОМАТ ДЛЯ КОПИРОВАЛЬНОГО ГРАВИРОВАНИЯ | 1948 |
|
SU85361A1 |
| Способ балансировки роторов иуСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU800754A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РАБОЧИМИ ОРГАНАМИ КРУГЛОВЯЗАЛЬНОЙ МАШИНЫ | 1973 |
|
SU390216A1 |
| Устройство для автоматической подналадки резца | 1974 |
|
SU516471A1 |
«7
Фиг. S
