Предлагаемый прибор предназначен для автоматического вычерчивания интегральных кривых любого обыкновенного диференциального уравнения первого порядка, разрешенного относительно производной y′ искомой функции, т.е. уравнения вида:  при произвольно заданных начальных значениях х=х0, у=y0, иными словами, для вычерчивания интегральной кривой, проходящей через произвольно заданную точку (х0, у0).
при произвольно заданных начальных значениях х=х0, у=y0, иными словами, для вычерчивания интегральной кривой, проходящей через произвольно заданную точку (х0, у0).
Пусть будет дано диференциальное уравнение:

Его интегральные кривые, т.е. графики его интегралов вида y=F(х), характеризуются тем свойством, что в каждой точке М(х, у) такой кривой направление касательной к ней составляет с осью ОХ угол φ, для которого tgφ=f(х, у), то есть:

где arctg есть главное значение функции арктангенс, так что  . Итак, уравнением (1) или, вернее, его правой частью f(х, у), в каждой точке на плоскости ХОУ (по крайней мере в известной ее части) определяется этот угол φ. Если плоскость колесика с острым ребром, стоящего вертикально на бумаге, положенной на плоскость ХОУ, будет в каждом своем положении составлять с осью ОХ угол, равный, углу φ, определяемому формулою (2), т.е. будет проходить через касательную к искомой интегральной кривой, то, колесико, будучи подталкиваемо в направлений оси ОХ, будет катиться по бумаге, описывая как раз одну из таких интегральных кривых, ибо острое ребро колесика не позволит ему скользить по бумаге в сторону от направления его плоскости (дрейфовать).
. Итак, уравнением (1) или, вернее, его правой частью f(х, у), в каждой точке на плоскости ХОУ (по крайней мере в известной ее части) определяется этот угол φ. Если плоскость колесика с острым ребром, стоящего вертикально на бумаге, положенной на плоскость ХОУ, будет в каждом своем положении составлять с осью ОХ угол, равный, углу φ, определяемому формулою (2), т.е. будет проходить через касательную к искомой интегральной кривой, то, колесико, будучи подталкиваемо в направлений оси ОХ, будет катиться по бумаге, описывая как раз одну из таких интегральных кривых, ибо острое ребро колесика не позволит ему скользить по бумаге в сторону от направления его плоскости (дрейфовать).
Итак, все сводится к тому, чтобы прибор автоматически устанавливал колесико в каждый момент в требуемом направлении (т.е. под углом φ к ОХ). Достижение такой автоматической регулировки направления колесика в предлагаемом приборе достигается тем, что это колесико укрепляется в нижней части пружинящего вертикального сложного стержня переменной длины, оканчивающегося наверху другим колесиком, которое упирается в поверхность:

Благодаря особому устройству этого стержня (винтовые прорезы) он автоматически укорачивается или удлиняется, в зависимости от характера поверхности (3), и в то же время поворачивается около своей оси вместе с обоими колесиками таким образом, что последние все время находятся в требуемой плоскости; поэтому нижнее колесико, катясь, описывает искомую кривую.
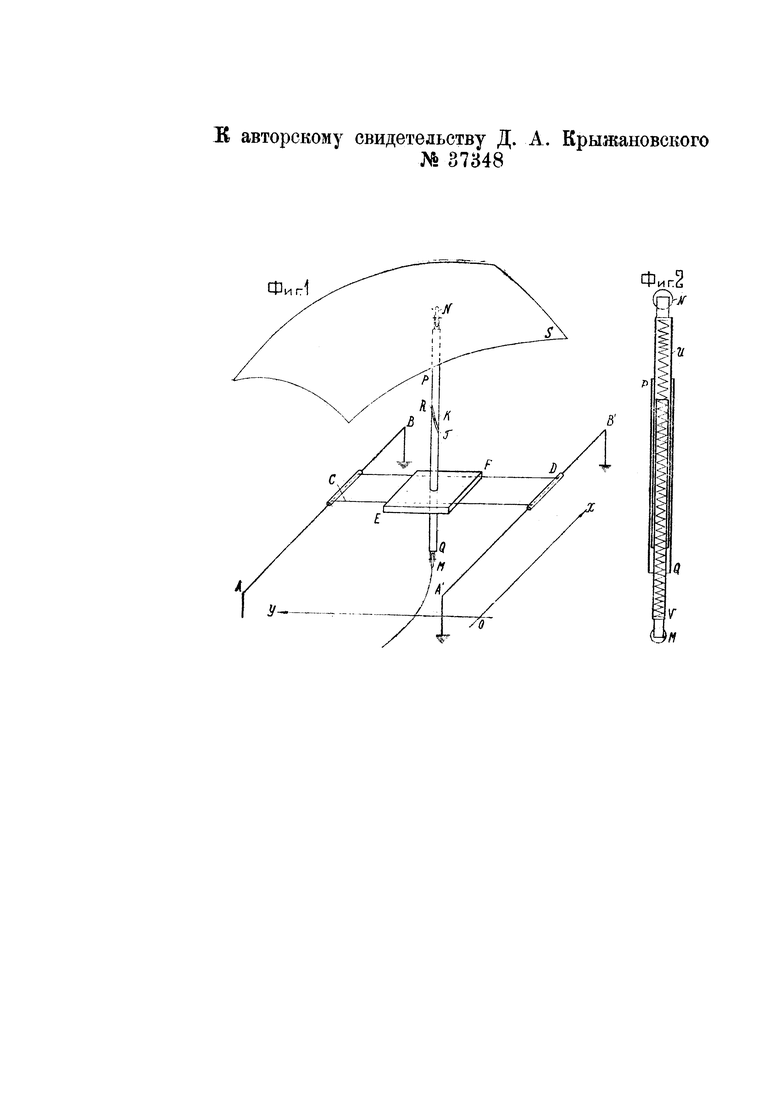
На фиг. 1 чертежа изображен схематический вид предлагаемого прибора; на фиг. 2 - стержень прибора.
Прибор состоит из двух горизонтальных направляющих АВ и А′В′, параллельных оси ОХ, вдоль которых могут передвигаться направляющие CD, оставаясь все время параллельно своему начальному положению. По направляющим может перемещаться (скользить, либо катиться) с минимальным трением втулка EF, с которой наглухо соединена наружная трубка PQ вертикального сложного стержня. Последний состоит (фиг. 2) из трех частей: наружной трубки PQ с прорезом RT (или двумя диаметрально противоположными прорезами) по винтовой линии с шагом 2π (в некотором масштабе), средней трубки U, открытой снизу, а сверху заканчивающейся вилкой с резиновым колесиком N в ней, и внутренней трубки V, также открытой сверху и оканчивающейся снизу вилкой со стальным колесиком М с острым ребром.
Внутри средней и внутренней трубок помещена спиральная пружина, распирающая обе эти трубки в разные стороны. Вдоль наружной поверхности внутренней трубки идут две диаметрально противоположные канавки для помещения двух соответствующих выступов, так что эти две трубки могут только сдвигаться или раздвигаться, но не вращаться одна относительно другой.
Снаружи средняя трубка снабжена шипом K, входящим в винтовую прорезь наружной трубки (или два шипа, входящие в две прорези). Поэтому средняя трубка, поднимаясь или опускаясь, одновременно будет вращаться около своей оси, так как наружная трубка наглухо соединена со втулкой EF и потому не меняет своей ориентировки относительно осей ХОУ. Так как шаг винтового прореза равен 2π, то при поднятии средней трубки на 2π она одновременно делает полный оборот, т.е. поворачивается на 2π радианов, а потому вообще поворот ее (в радианах) всегда численно равен ее поднятию или опусканию.
Доска прибора изображает плоскость ХОУ. На нее кладется лист белой бумаги, поверх нее копирка и еще лист бумаги. Над доской укрепляется на стойках металлическая или гипсовая модель S поверхности:

точнее: обращенная книзу поверхность модели должна изображать поверхность (4), где С - произвольная постоянная, превосходящая  (в масштабе, принятом для винтового прореза). Так как всегда
(в масштабе, принятом для винтового прореза). Так как всегда  то Z>О, т.е. вся поверхность (модель) лежит над плоскостью ХОУ.
то Z>О, т.е. вся поверхность (модель) лежит над плоскостью ХОУ.
Оба колесика устанавливаются в одной вертикальной плоскости, а именно так, чтобы в то время, как верхняя точка верхнего колесика находится на высоте, равной С (над плоскостью ХОУ), общая плоскость колесиков была параллельна плоскости XOZ. Штифт и винтовой прорез устанавливаются в таких местах, чтобы в это же время штифт находился ровно посередине всего прореза, который от этого места должен продолжаться вверх и вниз (по вертикали) на  (т.е. на
(т.е. на  оборота). Но в силу равенства (4) и (2):
оборота). Но в силу равенства (4) и (2):

т.е. изменение координаты Z точки N (находящейся все время на поверхности S) равно изменению угла φ между касательной к искомой интегральной кривой и осью ОХ; а с другой стороны, изменение (т.е. вертикальное перемещение средней трубки) равно повороту этой трубки около ее оси. Следовательно, эта трубка, а с нею и оба колесика все время поворачиваются на такой же угол, на какой поворачиваются касательная. А так как при Z=C колесики находятся в плоскости XOZ и в то же время угол φ=С, т.е. колесики проходят через направление касательной, то и вообще колесики всегда будут направлены по касательной, что и требовалось от прибора.
Работа с прибором заключается в том, что, установив нижнее колесико М над, точкой (x0, у0), перемешаем (непосредственно руками, или, лучше, посредством двух шнуров, укрепленных к направляющим С и D и перекинутых через блоки и соединенных затем в один шнур, за который надо тянуть), направляющие С вдоль направляющих АВ, А′В′. При этом средняя трубка все время то вдвигается, то выдвигается из наружной, в зависимости от поднятия или опускания поверхности S, в которую упирается колесико N; ее шип перемещается по винтовому прорезу, что вызывает поворачивание средней и внутренней трубок, а с ними и обоих колесиков. Усилие, оказываемое направляющими C,D через посредство втулки EF и стержня на нижнее колесико в направлении оси ОХ, встречает сопротивление бумаги, в которую более или менее врезается острое ребро колесика; слагающая названного усилия, нормальная к плоскости колесика, уничтожается этим сопротивлением бумаги, а слагающая, лежащая в плоскости колесика, заставляет его катиться в этом направлении, а тележку перемещаться вдоль направляющих. На нижнем листе бумаги колесико через копирку рисует свою траекторию, т.е. требуемую интегральную кривую, проходящую через заданную точку (x0, у0).
Практически работоспособность прибора обусловливается сведением к возможному минимуму всех вредных трений в автоматически движущихся частях. С этой целью можно рекомендовать: а) направляющие C,D установить на колесах, охватывающих сверху и снизу направляющие АВ и А′В′, имеющие квадратное сечение с вертикальною и горизонтальною диагоналями; б) наружную трубку заменить двумя кольцами (на одной вертикали) с тремя колесиками на каждом, обращенными внутрь; а на средней трубке сделать три параллельные канавки вдоль винтовых линий с ходом 2π; при движении средней трубки вверх и вниз эти колесики должны катиться по канавкам, что представляет весьма значительное уменьшение трения по сравнению с трением шипа в прорези; в) скольжение выступов средней трубки по канавкам внутренней тоже следует заменить катанием соответствующих колесиков по бороздам.
Как видно из описания, интегрирование помощью этого прибора требует изготовления для каждого конкретного уравнения, подлежащего интегрированию, соответствующей поверхности. На естественно возникающий вопрос об экономичности предлагаемого способа интегрирования возможно дать ответ, что если для данного конкретного уравнения типа (1) требуется найти только один или два-три интеграла, то дешевле и скорее будет выполнить это интегрирование обычным графическим, либо приближенным вычислительным путем. Если же одно и то же уравнение указанного типа требуется интегрировать десятки (или даже сотни) раз при различных начальных данных (другими словами, если требуется провести десятки его интегральных кривых через заданные точки), то будет, повидимому, проще изготовить соответствующую поверхность (3) и с ее помощью построить требуемые кривые. Но совершенно несравнимое преимущество предлагаемый способ будет представлять в тех случаях, когда требуется изучить вообще все семейство интегралов данного уравнения с точки зрения их особенностей, например, определить интегральную кривую, которая имела бы тот или другой заранее заданный характер.
Для нахождения квадратур
т.е. интегралов уравнений типа у′=f(x), требуется построить цилиндрическую поверхность (с образующими параллельными оси ОУ).

которую, конечно, изготовить можно легче, чем в общем случае, когда f(х, у) зависит от двух аргументов. А именно, достаточно изготовить два плоских лекала (шаблона), вырезав их по кривой (3) и, поместив одно параллельно другому, покрыть их металлическим листом.
Столь же упрощается дело и в случае уравнений вида:

для чего надо построить тоже цилиндрическую поверхность Z=arctgf(у)+С,С образующими, параллельными оси ОХ, вместо того, чтобы заменять интегрирование уравнения (1′) интегрированием уравнения 
Но и в случае функции f(x, y) от двух аргументов возможны аналогичные упрощения, а именно в тех случаях, когда поверхность (3) представляет тоже цилиндр, но как-либо повернутый в пространстве (т.е. с образующими, не параллельными ни одной из осей); независимо от практической ценности прибор имеет несомненное демонстративно-методическое значение, так как с его помощью (имея хотя бы одну поверхность или небольшой набор таковых), можно наглядно выяснить учащимся самую идею интегрирования диференциальных уравнений и семейства его интегралов, а также определения одного из них уклоном его в данной точке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интеграф | 1949 |
|
SU97011A1 |
| Полярный интеграф | 1958 |
|
SU120653A1 |
| Устройство для решения интегральных уравнений | 1939 |
|
SU70321A1 |
| ДИПОЛЬНЫЙ ИЗЛУЧАТЕЛЬ | 2011 |
|
RU2472261C1 |
| ГАРМОНИЧЕСКИЙ АНАЛИЗАТОР СЛОЖНЫХ ПЕРИОДИЧЕСКИХ КРИВЫХ | 1924 |
|
SU3606A1 |
| ПРИБОР ДЛЯ ВЫЧЕРЧИВАНИЯ ТЯГОВЫХ КРИВЫХ | 1916 |
|
SU3500A1 |
| ВИБРАТОРНАЯ АНТЕННА | 2014 |
|
RU2571156C2 |
| Прибор для вычерчивания различного рода кривых | 1930 |
|
SU34151A1 |
| МАЛОГАБАРИТНЫЙ СНЕГОУБОРОЧНЫЙ АГРЕГАТ | 2006 |
|
RU2301295C1 |
| ДЕЛИТЕЛЬ ЛЬНОУБОРОЧНОЙ МАШИНЫ | 2009 |
|
RU2385562C9 |
1. Прибор для вычерчивания интегральных кривых обыкновенных диференциальных уравнений первого порядка  отличающийся тем, что ось чертящего интегральную кривую колесика М укреплена на одном из концов вертикального стержня, составленного из двух распираемых помещенной внутри них пружиной трубчатых стержней U и V, один из которых снабжен шипом K, пропущенным в винтовую прорезь передвижной в двух взаимно перпендикулярных направлениях трубки PQ с той целью, чтобы при перемещении колесика М на бумаге, а противоположного конца стержня по поверхности Z=arctgf(x, y)+С плоскость колесика М всегда совпадала с направлением касательной к вычерчиваемой интегральной кривой.
отличающийся тем, что ось чертящего интегральную кривую колесика М укреплена на одном из концов вертикального стержня, составленного из двух распираемых помещенной внутри них пружиной трубчатых стержней U и V, один из которых снабжен шипом K, пропущенным в винтовую прорезь передвижной в двух взаимно перпендикулярных направлениях трубки PQ с той целью, чтобы при перемещении колесика М на бумаге, а противоположного конца стержня по поверхности Z=arctgf(x, y)+С плоскость колесика М всегда совпадала с направлением касательной к вычерчиваемой интегральной кривой.
2. Форма выполнения прибора по п. 1, отличающаяся тем, что противоположный колесику М конец стержня снабжен колесиком N.
