Р1зобретение относится к области аналоговой вычислительной техники.
Известно устройство для моделирования турбины, содержащее датчик скорости, соединенный с моделью регулятора скорости турбины и с блоками моделирования момента инерции и самовыравнивания турбины, сумматор, соединенный с блоками управления сетевой и роторной групп управляемых вентилей асинхронного двигателя с фазным ротором (асинхронно-вентильный каскад).
Недостатком этого устройства является то, что при моделировании быстроходных турбин с номинальной скоростью свыше 6000 об/мин возникают значительные затруднения моделирования момента инерции первичного двигателя и имеются технические трудности изготовления высокоскоростного асинхронного двигателя с фазным ротором, так как наличие контактных колец затрудняет обеспечение требуемой коммутации. Известные модели, выполненные на базе машин постоянного тока, также не могут быть использованы для моделирования быстроходных первичных двигателей из-за невозможности обеспечения коммутации коллекторного узла.
Предложенное устройство с целью расширения класса решаемых задач и повышения точности отличается тем, что с целью повышения быстродействия и расширения возможностей
моделей по числу оборотов оно содержит бесконтактный двигатель переменного тока (асинхронный либо синхронный), статический преобразователь частоты, блок управления которого соединен с выход,ом сумматора аналоговой модели.
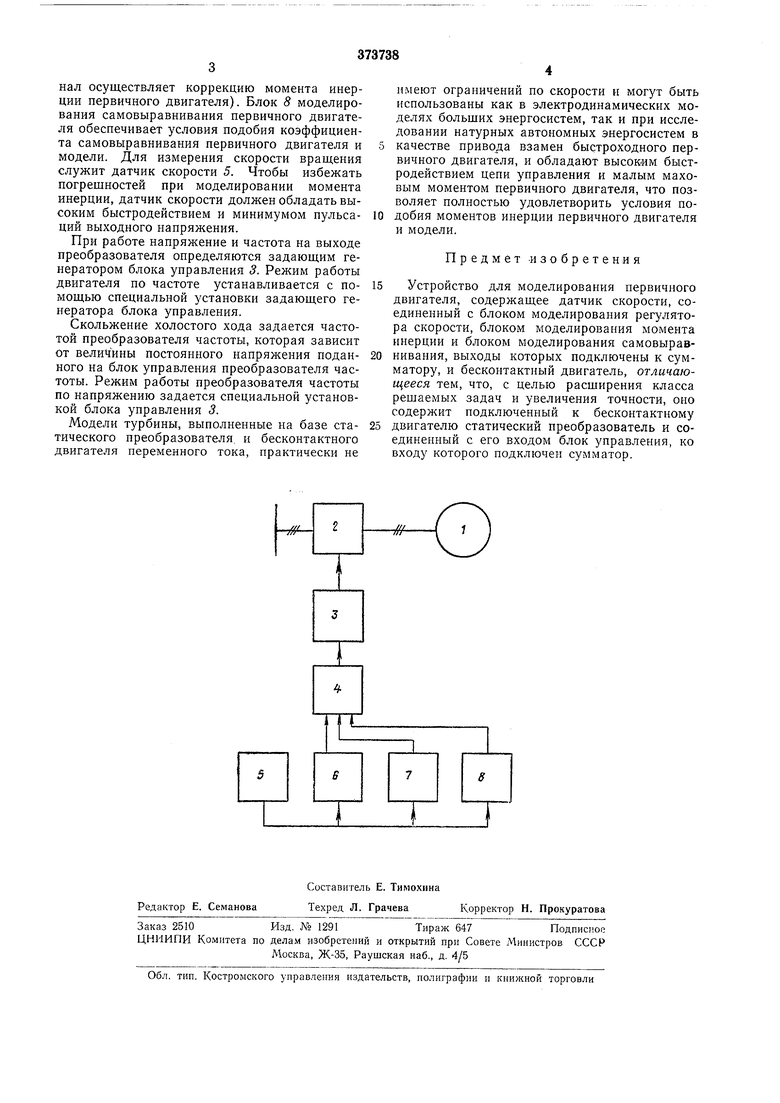
Схема модели изображена на чертеже. Модель состоит из бесконтактного асинхронного либо синхронного двигателя У, статического преобразователя 2, блока управления 3 статическим преобразователем частоты, сумматора 4, датчика скорости 5, блока 6 моделирования регулятора скорости первичного двигателя, блока 7 моделирования момента инерции и блока 8 моделирования самовыравнивання первичного двигателя.
Блок управления 3 задает частоту статического преобразователя 2 и закон регулирования напряжения при использовании асинхронного двигателя, либо задает закон регулирования тока возбуждения при использовании в качестве первичного двигателя / бесконтактную синхронную машину. Сигнал, поступающий на блок управления 3 от сумматора 4, представляет сумму напряжений, полученных от блока 7 моделирования момента инерции и блока 5 и от аналоговой модели блока 6. Блок 7 моделирования момента инерции представляет собой дифференциатор, выходное напрял ение
которого есть производная скорости (этот сиг
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ ТУРБИН | 1970 |
|
SU264811A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА | 2015 |
|
RU2592641C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭДС РОТОРА СИНХРОННЫХ И ТОКА РОТОРА АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ (ЕГО ВАРИАНТЫ) | 2001 |
|
RU2207578C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2002 |
|
RU2231208C2 |
| Способ управления асинхронным электроприводом и устройство для его осуществления | 1984 |
|
SU1458962A1 |
| Устройство для моделирования бесконтактного двигателя постоянного тока | 1980 |
|
SU1035618A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2354036C1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
