Изобретение относится к области автоматики.
Известны устройства для моделирования углового координатора с коническим сканированием луча антенны, содержащие датчик диаграммы направленности антенны, оптически связанный через щелевую диафрагму с фотоприемником, модель радиоприемника углового координатора, фазовые детекторы, соединенные с моделями каналов автосопровождения по углу места и азимуту, платформу с горизонтальным и вертикальным приводами, двигатель, связанный с платформой и управляющий щелевой диафрагмой, установленной на платформе, блоки сравнения, одни из входов которых соединены с соответствующими выходами вычислителя, и генератор опорных напряжений.
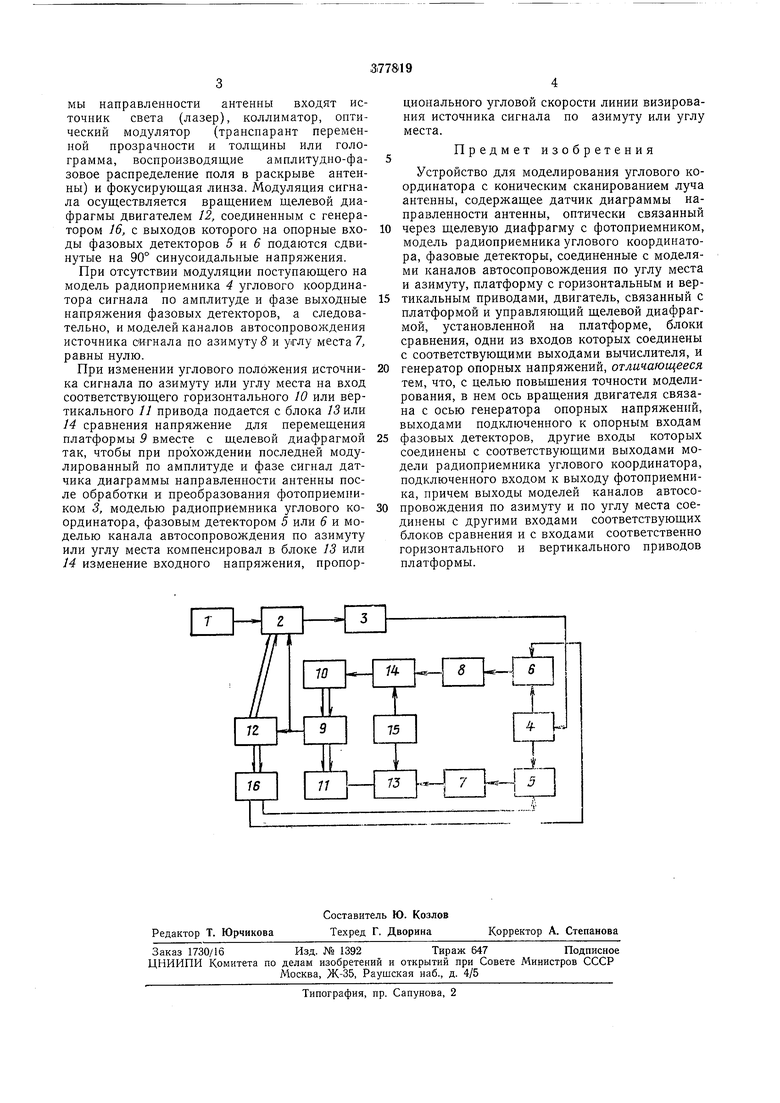
Предлагаемое устройство отличается от известных тем, что в нем ось вращения двигателя связана с осью генератора опорных напряжений, выходами подключенного к опорным входам фазовых детекторов, другие входы которых соединены с соответствующими выходами модели радиоприемника углового координатора, подключенного входом к выходу фотоприемника. Выходы моделей каналов автосопровождения по азимуту и по углу места соединены с другими входами соответствующих блоков сравнения и с входами соответственно горизонтального и вертикального приводов платформы. Это позволяет повысить точность моделирования. Блок-схема устройства показана на чертеже.
Устройство содержит датчик / диаграммы направленности антенны, оптически связанный через щелевую диафрагму 2 с фотоприемником .; модель радиоприемника 4 углового координатора; фазовые детекторы 5 и 6, соединенные
с моделями каналов автосопровождения по углу места 7 и азимуту S; платформу 9 с горизонтальным 10 и вертикальным // приводами; двигатель 12, управляемый сигналом с платформы 9 и управляющий диафрагмой 2, установленной на платформе; блоки 13 и 14 сравнения, одни из входов которых соединены с соответствующими выходами вычислителя 15; и генератор 16 опорных напряжений. В исходном состоянии, когда на входе блоков 13 и 14 сравнения напряжения, пропорциональные угловым скоростям линии визирования источника сигнала, равны нулю, щелевая диафрагма 2, установленная на подвижной платформе 9, занимает такое положение, при
котором фотоприемник 5 принимает немодулированные по амплитуде и фазе сигналы оптического датчика / диаграммы направленности антенны, что равнозначно нахонсдению источника сигнала на равносигнальном направлении. В оптический датчик диаграммы направленности антенны входят источник света (лазер), коллиматор, оптический модулятор (транспарант переменной прозрачности и толщины или голограмма, воспроизводящие амплитудно-фазовое распределение поля в раскрыве антенны) и фокусирующая линза. Модуляция сигнала осуществляется вращением щелевой диафрагмы двигателем 12, соединенным с генератором 16, с выходов которого на опорные входы фазовых детекторов 5 и б подаются сдвинутые на 90° синусоидальные напряжения.
При отсутствии модуляции поступающего на модель радиоприемника 4 углового координатора сигнала по амплитуде и фазе выходные напряжения фазовых детекторов, а следовательно, и моделей каналов автосопровождения источника сигнала по азимуту S и углу места 7, равны нулю.
При изменении углового положения источника сигнала по азимуту или углу места на вход соответствующего горизонтального 10 или вертикального 11 привода подается с блока 13 или 14 сравнения напряжение для перемещения платформы 9 вместе с щелевой диафрагмой так, чтобы при прохождении последней модулированный по амплитуде и фазе сигнал датчика диаграммы направленности антенны после обработки и преобразования фотоприемником 3, моделью радиоприемника углового координатора, фазовым детектором 5 или 6 и моделью канала автосопровождения по азимуту или углу места компенсировал в блоке 13 или 14 изменение входного напряжения, пропорционального угловой скорости линии визирования источника сигнала по азимуту или углу места.
Предмет изобретения
Устройство для моделирования углового координатора с коническим сканированием луча антенны, содержащее датчик диаграммы направленности антенны, оптически связанный через щелевую диафрагму с фотоприемником, модель радиоприемника углового координатора, фазовые детекторы, соединенные с моделями каналов автосопровождения по углу места и азимуту, платформу с горизонтальным и вертикальным приводами, двигатель, связанный с платформой и управляющий щелевой диафрагмой, установленной на платформе, блоки сравнения, одни из входов которых соединены с соответствующими выходами вычислителя, и генератор опорных напряжений, отличающееся тем, что, с целью повышения точности моделирования, в нем ось вращения двигателя связана с осью генератора опорных напряжений, выходами подключенного к опорным входам фазовых детекторов, другие входы которых соединены с соответствующими выходами модели радиоприемника углового координатора, подключенного входом к выходу фотоприемника, причем выходы моделей каналов автосопровождения по азимуту и по углу места соединены с другими входами соответствующих блоков сравнения и с входами соответственно горизонтального и вертикального приводов платформы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО | 2005 |
|
RU2304792C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛИ | 1992 |
|
RU2020506C1 |
| Устройство автосопровождения | 1975 |
|
SU568029A1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2013 |
|
RU2515291C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 2011 |
|
RU2476826C1 |
| СИСТЕМА ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163353C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ИСТИННОГО МЕРИДИАНА И ВОЛОКОННО-ОПТИЧЕСКИЙ ГИРОКОМПАС, РЕАЛИЗУЮЩИЙ СПОСОБ | 1996 |
|
RU2115889C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ И РАДИОЛОКАЦИОННЫЙ КООРДИНАТОР ЦЕЛИ | 2020 |
|
RU2753370C1 |
| Оптико-электронная многоканальная головка самонаведения | 2020 |
|
RU2756170C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ЦЕЛИ МОБИЛЬНОЙ РЛС | 2008 |
|
RU2410711C2 |
