1
Изобретение относится к автоматизированному электроприводу при управлении скоростью вращения двигателя постоянного тока независимого возбуждения изменением напряжения на якоре и может быть использовано в ответственных механизмах, производительность которых определяется временем протекания переходных процессов (металлургический привод станов горячей прокатки, привод металлорежущих станков с числовым программным управлением (ЧПУ) и др.), а также в устройствах, где требуется механическая характеристика определенного вида (электротяга и подъемно-транспортные устройства).
Известны управляемые электроприводы постоянного тока, содержащие соединенные последовательно задатчиК скорости и ускорения, вервый сумматор, регулятор скорости, второй -сумматор, регулятор тока, силовой преобразователь, к выходу которого через щунт подключен якорь электродвигателя независимого возбуждения, с валом которого связан датчик скорости, выход которого соединен с первым входом первого сумматора, шунт подключен ко входу датчика тока, выход которого подключен к одному из входов второго сумматора. Однако при малой величине электромеханической постоянной свойства привода ухудщаются, что проявляется в уменьщении быстродействия но управлению и
смягчению механических характеристик. Меры, принимаемые в известных электроприводах для снижения статизма системы по нагрузке, одновременно снижают быстродействие привода по управлению. Кроме того, динамическая просадка скорости при приложении нагрузки и время восстановления скорости весьма велики. Это ограничивает область применения известных электроприводов.
Целью изобретения является повышение быстродействия привода и расширение области применения путем независимой компенсации управляющего сигнала по управлению и нагрузке. Это достигается тем, что электропривод содержит интегродифференцирующее звено, блок компенсации нагрузки и эталонную модель, вход которой связан с выходом задатчика скорости и ускорения, первый и второй выходы соединены соответственно с
первым и вторым входами блока компенсации нагрузки, к третьему входу которого подсоединен выход датчика скорости, к четвертому- выход датчика тока, а выход блока компенсации нагрузки связан с соответствующим
входом первого сумматора, связанного через интегродифференцирующее звено с эталонной моделью. того, в нем эталонная модель содержит усилитель и последовательно соединенные сумматор модели, инерционное звено
модели и интегратор, выход которо-го подключен к одному из входов сумматора модели и ко второму выходу эталонной модели, вход которой связан с другим входом сумматора модели, к первому выходу эталонной модели подсоединен выход усилителя, вход которого связан с выходом инерционного звена модели, а блок компенсации нагрузки содержит сумматор, соответствующие входы которого связаны со вторым и третьим входами блока компенсации нагрузки, инерционное звено и усилитель-сумматор, один вход которого соединен с выходом сумматора непосредственно, а второй - через последовательно включенные инерционное звено и инвертор, соединенные последовательно усилитель-формирователь, функциональное звено и задатчик интенсивности компенсации, выход которого связан с выходом блока компенсации нагрузки, примем его первый и четвертый входы и выход усилителя-сумматора соединены с соответствующими входами усилителя-формирователя.
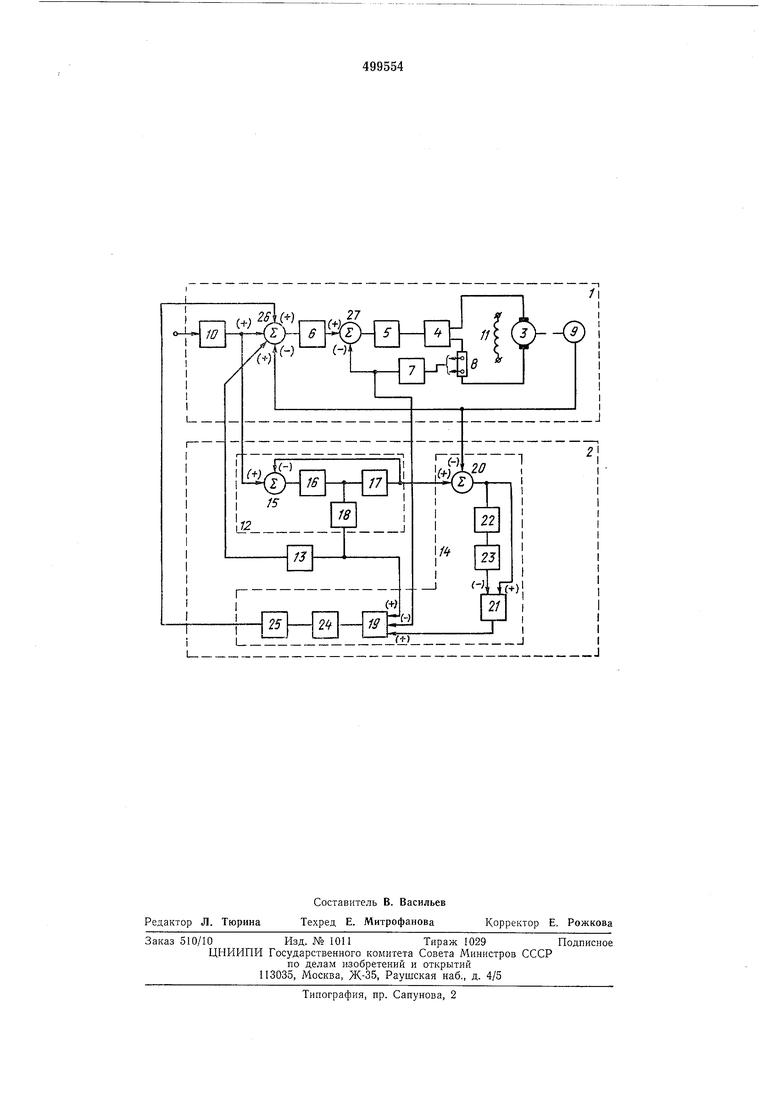
На чертеже изображена функциональная схема управляемого электропривода постоянного тока.
Она содержит известный (типовой) привод 1, и компенсирующее устройство 2. Типовой привод 1 содержит электродвигатель независимого возбуждения 3, силовой преобразователь 4, регулятор тока 5, регулятор скорости 6, датчик тока 7, который присоединен к шунту 8 в якорной цепи электродвигателя 3, замкнутого обратной связью по скорости через датчик скорости 9, задатчик скорости и ускорения 10, на который подается ступенчатый сигнал, и обмотку возбуждения 11 электродвигателя 3. Эталонная модель 12 связана со входом типового привода 1 через интегродифференцирующее звено 13. С другим входом привода 1 соединен выход блока компенсации нагрузки 14. Эталонная модель 12 содержит сумматор модели 15, инерционное звено модели 16, интегратор 17, обратной связью подсоединенный к сумматору модели 15, и усилитель 18. Блок компенсации нагрузки 14 содержит усилитель - формирователь 19, который соединен с сумматором 20 через усилитель-сумматор 21, а также через инерционное звено 22 и инвертор 23, функциональное звено 24 и задатчик интенсивности компенсации 25. Алгебраическое суммирование сигналов управления, компенсации и обратных связей производится на сумматорах 26 и 27.
Принцип действия управляемого электропривода заключается в следующем.
Управление типовым приводом 1 производится регулятором тока 5, регулятором скорости 6 с помощью отрицательных обратных связей: связи по току двигателя, снимаемой с датчика тока 7 при использовании шунта 8 в якорной цепи, и связи по скорости двигателя 3, снимаемой с датчика скорости 9. Управление скоростью двигателя осуществляется выходным напряжением задатчика скорости и ускорения 10 интегрального типа, на вход которого подается ступенчатый сигнал. Эталонпая модель 12 приближенно, но с достаточной точностью описывает свойства типового привода 1 но управлению. На вход сумматора модели 15 подается выходной сигнал с задатчика скорости и ускорения 10. Напряжение на выходе инерционного звена модели 16 пропорционально динамическому току но управлению двигателя 3. Оно усиливается до необходимой величины усилителем 18. По сигналу усилителя 18 осуществлена компенсирующая связь через интегродифференцирующее звено 13, напряжение с выхода которого подается на вход регулятора скорости 6 через сумматор 26.
Напряжение обратной связи с выхода интегратора 17 имитирует скорость двигателя 3 по управляющему сигналу - выходному сигналу задатчика скорости и ускорения 10.
БлОК комненсации нагрузки 14 реализует зависимость
(р -г. i,R, (р) СеГ„/7Л«д (р),
В соответствии с которой косвенным способом формируется возмущающее воздействие на валу двигателя IcRoЗдесь /с - ток двигателя, вызванный действием нагрузки;
Дпд - текущее изменение скорости двигателя при изменении нагрузки; /с - установившийся ток нагрузки; - полное сопротивление якорной цепи преобразователь - двигатель;
Се - коэффициент э. д. с. двигателя; Гм - электромеханическая постоянная
времени.
Первый член нравой части зависимости в блоке 14 выделяется как разность двух сигналов- сигнала полного тока двигателя 3 с датчика тока 7 и сигнала с выхода усилителя
18,имитирующего ток двигателя по управлению. Алгебраическое сложение этих сигналов производится в усилителе - формирователе
19.Второй член в правой части уравнения образуется следующим образом. На входы сумматора 20 с разными знаками подаются: выходной сигнал эталонной модели 12 и сигнал обратной связи по скорости. Выход сумматора 20 пропорционален изменению скорости двигателЯ Аид. Операция неявного дифференцирования сигнала и усиление сигнала производной реализуется усилителем-сумматором 21, на входы которого подаются с разными знаками сигнал с выхода сумматора 20 непосредственно и через инерционное звене 22 и инвертор 23. На выходе усилителя - формирователя 19 в соответствии с уравнением образуется сигнал, пропорциональный возмущению по нагрузке на валу двигателя IcRoНанряжение с выхода усилителя-формирователя 19 далее проходит через функциональное звено 24 на задатчик интенсивности компенсации 25, сигнал с которого подается на вход сумматора 26. Задатчик 25 определяет скорость нарастания тока двигателя 3. Функциональная зависимость звена 24 зависит от характера требований к механическим характеристикам двигателя. Если требуются прямолинейные механические характеристики различной жесткости, то функциональное звено 24 реализует пропорциональную зависимость. В других случаях функция звена 24 определяется Конкретными требованиями к форме механических характеристик. Если привод работает вхолостую, то алгебраическая сумма сигналов на входе усилителя-формирователя 19 равна нулю. Блок 14 не оказывает тогда влияния на работу привода. При приложении нагрузки на вал двигателя 3 осуществляется компенсация изменения скорости по нагрузке. Вследствие того, что рассчитывается возмущающее воздействие на валу двигателя, компенсация осуществляется по разомкнутому циклу. Она не затрагивает процесса управления. Преимущество моделирования возмущающего воздействия IcRo состоит и в быстроте начала действия компенсации, что обеспечивает малое динамическое изменение скорости при высоком быстродействии управления. Указанное преимущество наиболее значительно при резкоменяющейся нагрузке. В результате обеспечивается высокое быстродействие привода и регулируются свойства системы по нагрузке, ттричем оказывается возможным получение без влияния па управление прямолинейных механических характеристик, а также и криволинейных характеристик различной формы (например, характеристик, подобных характеристикам двигателя постоянного тока с последовательным возбуждением). Компенсация по нагрузке не только обеспечивает заданную статическую точность, но и малую динамическую ощибку по скорости при изменении нагрузки на валу двигателя.
Формула изобретения
1. Управляемый электропривод постоянного тока, содержащий соединенные последовательно задатчик скорости и ускорения, первый сумматор, регулятор скорости, второй сумматор, регулятор тока, силовой преобразователь, к выходу которого через щупт подключен якорь электродвигателя независимого возбуждения, с валом которого связан датчик
скорости, выход которого соединен с первым входом первого сумматора, шунт подключен ко входу датчика тока, выход которого подключен к одному из входов второго сумматора, отличающийся тем, что, с целью повыщения быстродействия привода и расширения области применения путем независимой компенсации управляющего сигнала по управлению н нагрузке, он содержит иптегроднфференцирующее звено, блок компенсации нагрузки и эталонную модель, вход которой связан с выходом задатчика скорости и ускорения, первый и второй выходы соединены соответственно с первым и вторым входами блока компенсации нагрузки, к третьему входу которого подсоединен выход датчика скорости, К четвертому - выход датчика тока, выход блока компенсации нагрузки связан со вторым входом первого сумматора, с третьим входом которого через интегродифференцирующее звено связан первый выход эталонной модели.
2.Управляемый электропривод по п. 1, отличающийся тем, что, эталонная модель содержит усилитель и последовательно соединенные сумматор модели, иперционное звено модели и интегратор, выход которого подключен к одному из входов сумматора модели и ко второму выходу эталонной модели, вход которой связан с другим входом сумматора модели, к первому выходу эталонной модели подсоединен выход усилителя, вход которого связан с выходом инерционного звена модели.
3.Управляемый электропривод по пп. 1 и 2, отличающийся тем, что блок компенсации нагрузки содержит сумматор, входы которого связаны соответственно со вторым и третьим входами блока компенсации нагрузки, инерционное звено и усилитель-сумматор, один вход которого соединен с выходом сумматора непосредственно, а второй - через последовательно включенные инерционное звено и инвертор, соединенные последоват ельно усилитель - формирователь, фупкциопа чьпое звено и задатчик интенсивности компенсации, выход которого связан с выходом блока компенсации пагрузки, причем его первый и четвертый входы и выход усилителя-сумматора соединены с соответствующими входами усилителя-формирователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система регулирования скорости | 1981 |
|
SU1007083A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РЕЖУЩЕГО ИНСТРУМЕНТА ПРИ ОБРАБОТКЕ ДЕТАЛЕЙ НА СТАНКЕ | 2010 |
|
RU2432233C2 |
| Электропривод | 2019 |
|
RU2713185C1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1290255A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С ФРИКЦИОННОЙ НАГРУЗКОЙ | 1992 |
|
RU2079961C1 |
| Устройство для управления электроприводом робота | 1987 |
|
SU1491693A1 |
| ЭЛЕКТРОПРИВОД С АДАПТИВНЫМ РЕГУЛИРОВАНИЕМ ТОКА | 1993 |
|
RU2095930C1 |
| Электропривод постоянного тока | 1985 |
|
SU1339853A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |