Изобретение относится к управлению горной техникой, а именно к управлению электроприводами механизмов одноковшовых экскаваторов, в которых требуется ограничение токов, возникающих в режимах с управляющими и воз- мущающими воздействиями, и может быть также использовано при управлении электроприводами драг и других землеройных машин.
Цель Изобретения - повышение точности управления за счет учета температуры внешней среды.
Сущность изобретения заключается в том, что измеряют ток, скорость и температуры двигателя, осуществляют сравнение последнего с по.роговым значением и в случае превьш ения его те-, кущего значения осуществляют сложение с сигналом тока, и в случае пре- вьш1ения этой суммы над величиной ограничения вь-читают полученный сигнал, сигналы обратных связей по току и скорости из задающего сигнала и формируют сигнал управления, а учет температуры внешней среды осуществляют
О5
ю со
4::
СО
за счет измерения температуры воздуха, сравнения ее с пороговым значением и в случае превышения этого значв- ния изменяют коэффициент обратной связи по току.
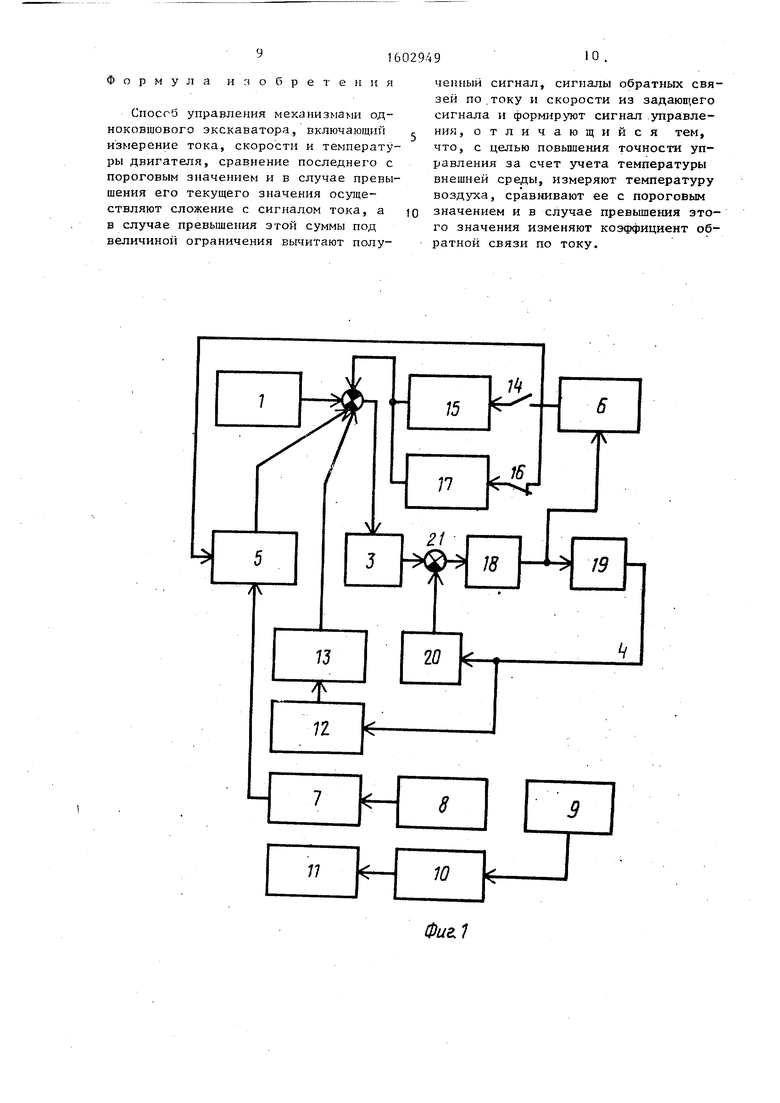
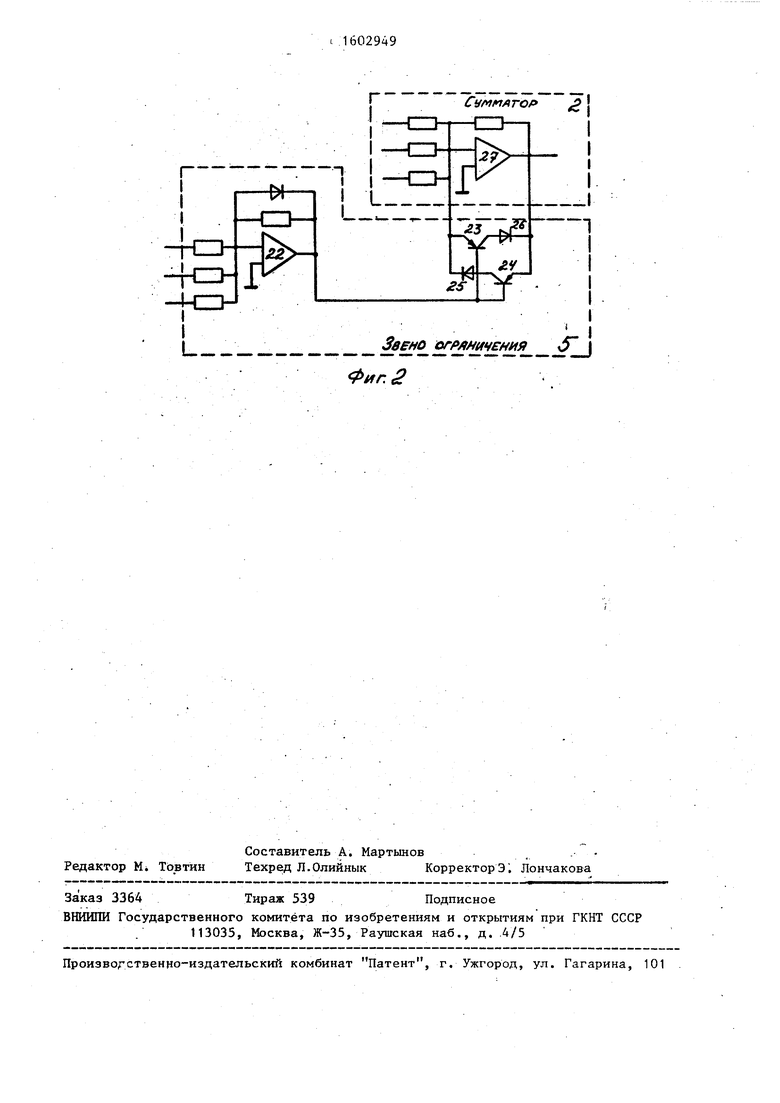
Ма фиг. 1 представлена структурная схема устройства, реализующего предлагаемый способ; на фиг. 2 - схема звена ограничения и сумматора.
Устройство содерткит последовательно соединенные командоаппарат 1 и сумматор 2, -выход которого подключен к электроприводу в составе преобразователя 3 и электродвигателя 4. К другому входу цумматора 2 подключен выход звена ограничения 5, к выходам которого подключены датчик тока 6 и выход порогового элемента 7, вход которого соединен с датчиком температуры двигателя 8. Датчик температуры воздуха 9 через второй пороговый элемент 10 соединен с обмоткой коммутационного элемента 11.
Устройство дополнительно снабжено датчиком скорости 12, через усилитель 13 соединэнным с третьим входом сумматора 2-, а датчик тока 6 дополнительно соединен через параллельные каналы, включающие последовательно соединенные замыкающий контакт 14, коммутационный элемент 11 и второй усилитель 15, размыкаю1Щ1Й контакт 16 и третий усилитель 17 - с четвертым входом сумматора 2.
Электродвигатель 4 представлен апериодическим звеном 18 с передаточной функцией , интегрирующим
р + а
«
звеном 19 с передаточной функцией
agi
, пропорциональным звеном
Р
20 с пе0
5
0
5
транзисторов 23, 24, а параллельно соединенные цени эмиттер - коллектор транзистора 23, анод-катод диода 26 и катод-анод диода 25, коллектор-эмиттер транзистора 24 соединены с входом и выходом операционного усилителя 27. Сумматор 2 собран на операционном усилителе 27. В устройстве могут быть использованы в качестве командоаппарата 1 - потенциометр, датчика тока 6 - шунт в якорной цепи двигателя, датчика скорости 12 - тахо- генератор, пороговых элементов 7 и 10 - стабилитроны, датчиков температуры 8 и 9 - термопары.
Способ управления механизмами одноковшового экскаватора осуществляется следующим образом.
На вход сумматора 2 подают задающий сигнал с командоаппарата 1, арифметически вычитают из него сигналы обратных связей по току с выхода усилителя 15 или 17 и по скорости с выхода усилителя 13. Коэффициенты усиления усилителей.13 и 15 (17) устанавливают такими, что коэффициенты обратных связей по скорости и току становятся оптимальными. Методика синтеза оптимальных обратных связей приведена ниже.
Электропривод с силовым тиристорным преобразователем в якорной цепи может быт ь представлен системой уравнений:
dig. dt
dW dt
и
,
М - M(j
+ L,
Т .;
L 1 ,
+ E;
40
Приведя систему к относительным единицам получим

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1420127A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1382919A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| Устройство управления электроприводом копающего механизма экскаватора | 1989 |
|
SU1656084A1 |
| Устройство управления электроприводами эскаватора | 1986 |
|
SU1432150A1 |
| СПОСОБ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ПРИВОДА ОДНОКОВШОВОГО ЭКСКАВАТОРА В ЭКСПЛУАТАЦИОННЫХ РЕЖИМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376422C1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Способ ограничения динамических нагрузок механизма поворота экскаватора и устройство для его реализации | 1990 |
|
SU1781393A1 |
Изобретение относится к управлению электроприводами механизмов одноковшовых экскаваторов и других землеройных машин. Цель изобретения - повышение точности управления за счет учета т-ры внешней среды. Для этого измеряют ток, скорость и т-ру двигателя и сравнивают последнюю с ее пороговым значением. В случае превышения текущим значением т-ры ее порогового значения осуществляют сложение с сигналом тока. При превышении этой суммой величины ограничения вычитают полученный сигнал, сигналы обратных связей по току и скорости из заданного сигнала и формируют сигнал управления электроприводом. Для учета т-ры внешней среды измеряют т-ру воздуха, сравнивают ее с пороговым значением и в случае превышения этого значения изменяют коэффициент обратной связи по току. Сформированный таким образом сигнал управления электроприводом обеспечивает оптимизацию квадратичных отклонений скорости и тока двигателя от их установившихся значений при минимуме расхода энергии. Это уменьшает нагрев двигателя в переходных процессах и динамические броски двигателя и усилия в механизмах экскаватора. 1 ил.
редаточным коэффициентом а,, и сумматором 21 ,
Апериодическое звено 18 представляет собой якорную цепь электродвигателя и характеризуется электромагнитной постоянной времени привода. Интегрирующее звено 18 представляет механическую часть двигателя в виде якоря и характеризуется электромеханической постоянной времени, а пропорциональ- ное звено 20 -. внутреннюю обратную СВЯЗЬ -по ЭДС двигателя и характеризуется конструктивной постоянной двигателя.
Звено ограничения 5 включает суммирующий операционньй усилитель 22, выход которого соединен с базами
где, R
с,, Ьа активное и индуктивное
сопротивления якорной цепи;
1602949 6 . .
С - конструктивная посто- Подставив (3) в систему исходных
янная двигателя; уравнений (1) I - момент инерции привода;
, 03 g - базовые значения напряжения, тока и скорости двигателя. Тогда исходная система уравнений
i, (-а„+Ь), ) х +(-а,+Ь,,) х
X,, а,х,.
Характеристический определитель оптимизированной системы
запишется в виде
( м 1 . , + Ьи;
Xg -
15 Характеристический многочлен опти- где а,,, а ,2. 2 параметры электро- мизированной системы
привода в относительных единицах; д(у)у -( +Ь-у), )у-(-а,.)а2,. Х(, Xg - соответственно ток
якоря и скорость 20 Расширенная система исходных и двигателя в относи- сопряженных уравнений тельных единицах; и - управляющее воздействие. Примем критерий оптимальности 25
X, -а , X -а X 2 + j ф, ;
X 2 а 2J Хд ;
I
OtJ
Г 5 J (K,xf+ ) dt, ,
о
где К, Kg, - весовые коэффициенты критерия оптимальности. Kg принимаем равным единице, а К равен 1, или 2, по которому решается задача аналитического конструирования регулятора.
Составляем функцию -Гамильтона
Н I (-К х -К х -КциЪ +
+ tf . (-а ,. х.-а,о х„+Ьи) + W а х . ,,
D(y)y + у Щ1М; + Л О, (4)
оптимальное управление
и -|-V..(2)
Система сопряженных уравнений
V .К,х,+ а,,ц, - 5 V Kj,x + a,t,;, .
45
где М ; - миноры второго порядка.
Уравнение (4) имеет четыре корня два из которых, отрицательны илк в о щем случае лежат в левой полуплоско ти комплексных корней
D(y)d(y) ..dgCy),
Иредполоксим, что закон оптимального уравнения имеет вид . полином отрицательных
корней;
SS , /.
(3)
в правой полуплоскости,
где N, , У2. коэффициенты оптимальныхz
обратных связей.(у)У -у(у,+Уг) + , х,+ х.
d (у) - полином корней, лежащих
внений (1)
i, (-а„+Ь), ) х +(-а,+Ь,,)
X,, а,х,.
Характеристический определитель оптимизированной системы
-а„ +b, -у
(1)
d(y)
гl
-у
Расширенная система исходны ряженных уравнений
X, -а , X -а X 2 + j ф, ;
Расширенная ряженных ур
X 2 а 2J Хд ;
I
Ц), К,х, +a,,Q;,- аг.у; (J)2 + а,2Ц;,,
Матрица расширенной системы уравнении
D
35
45
где М ; - миноры второго порядка.
Уравнение (4) имеет четыре корня, два из которых, отрицательны илк в оЬ- щем случае лежат в левой полуплоскости комплексных корней
корней;
, /.
в правой полуплоскости,
d (у) - полином корней, лежащих
Для того, чтобы оптималь.ная система бьиа устойчивой, а именно асимптотически устойчивой, необходимо характеристический многочлен оптимизированной системы приравнять к многочлену корней расширенной матрицы, лежащих в левой полуплоскости,
d«(y)(1)
п
d,(y).
В последнем тождестве приравняем коэ(рфициенты при неизвестных, имеющих одинаковые показатели степени, в результате получим систему уравнений 15
ГХ
-а„ + b-i, .у, + -а, (-3,4+ Ь }2.) .
(5)
Из (5) определяем коэффициенты
: - ZJ ±-22 ±-iiJ. X
(6)
:Л a2i..Zi
1-J i.
г а.Ь
Если подставить значения параметов электромеханической системы, то олучим конкретные численные значения зо птимальных обратных связей по току корной цепи и скорости двигателя. Ко- эсрфициенты усиления усилителей 15 и 17 устанавливаются различными, поэтому для усилителя 15 ), j , получен- ного при Кд 1, а для усшштеля 17 , , полученного при К 2. Сформированный таким путем сигнал управления электроприводом обеспечивает оптимизацию квадратичных отклонений дд скорости и тока двигателя от их установившихся значений, при минимуме расхода энергии, что уменьшает нагрев двигателя в переходных процессах. , .. - Работа устройства заключается в 45 следующем.
В гфоцессе разгона привода и резкого стопорения сигнал с датчика тока 6 на входе звена ограничения 5 превьшает сигнал с выхода первого по- Q рогового элемента 7, который зависит от температуры двигателя и определяет стопорное значение тока двигателя. Звено ограничения 5 уменьшает напряжение на выходе сумматора 2 и соот- , ветственно напряжение на выходе преобразователя 3, ограничивая таким образом текущее значение тока двигателя на уровне стопорного.
0
5
20
25
зо дд .. - 45
Q ,
При превышении температурой двигателя заданного значения сигнал с датчика температуры двигателя 8 превышает опорный сигнал в первом пороговом элементе 7 и проходит на вход звена ограничения 5, уменьшая сигнал с выхода сумматора 2 При уменьшении температуры воздуха ниже заданного значения сигнал с датчика температуры воздуха 9 становится больше опорного сигнала во втором пороговом элементе 10 и вызовет включение коммутационного элемента 11, размыкание контакта 16 и замыкание контакта 14. В результате этого сигнал с датчика тока 6, который усиливался усилителем 17, будет усиливаться усилителем 15. На вход сумматора 2 поступают сигналы с командоаппарата 1, с датчика скорости 12 через усилитель 13, с датчика тока 6 через усилитель 15 или 17. Результирующий сигнал с выхода сумматора 2, в необходимых случаях ограниченный выходным сигналом звена ограничения 5, поступает на вход преобразователя 3 и через него управляет электродвигателем 4.
Звено ограничения 5 работает следующим образом. На входе операционного усилителя 22 сравниваются сигналы с датчика тока 6 двигателя, с выхода первого порогового элемента 7 и опор- ньш сигнал. По мере повьш1ения температуры двигателя напряжение на выходе звена ограничения 5 увеличивается.. Этот сигнал вычитается из опорного сигнала, формируя сигнал задания опорного тока двигателя. При увеличении текущ. го значения тока двигателя до ,стопорного значения напряжение на вы- |ходе опера дионного усилителя 22 снижается. С этим напряжением сравнивает- ся напряжение на выходе операционного усилителя 27, на основе которого построен сумматор 2. Если напряжение на выходе операционного усилителя 27 становится большенапряжения на выходе усилителя 22, то открьшается транзистор 23 или 24 в зависимости от полярности напряжения на выходе усилителя 27, на его вход проходит напряжение с его выхода, не позволяя этому напряжению больше увеличиваться.
Действие звена ограничения и оптимальных .обратных связей уменьшает динамические броски тока двигателя и усилия в механизмах.
16029
Формула изобретения
Способ управления механизмами одноковшового экскаватора, включающий измерение тока, скорости и температуры двигателя, сравнение последнего с пороговым значением и в случае превышения его текущего значения осуществляют сложение с сигналом тока, а Q в случае превышения этой суммы под величиной ограничения вычитают полу/7
49
10
ченный сигнал, сигналы обратных связей по.току и скорости из задающего сигнала и форм11руют сигнал .управления , отличающийся тем, что, с целью повышения точности управления за счет учета температуры внешней среды, измеряют температуру воздуха, сравнивают ее с пороговым значением и в случае превьш1ения этого значения изменяют коэффициент обратной связи по току.
Ю
Фиг.1
| Устройство управления электроприводами эскаватора | 1986 |
|
SU1432150A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
