1
Изобретение относится к области вычислительной техники и может быть использовано в системах автоматического управления объектами, содержащими поворотные механизмы, например револьверную головку дыропробивного пресса.
Известны системы для программного управления поворотными механизмами, содержащие регистры требуемого и фактического положения, выходы которых соединены с соответствующими входами сумматора, подключенного через последовательно соединенные блок выявления нулей и блок формирования команд к приводу.
Цель изобретения - повысить быстродействие системы.
Предлагаемая система отличается от известной тем, что в ней два другие выхода сумматора соединены с соответствующими двумя входами дополнительного сумматора, выход которого подключен к другому входу блока формирования команд.
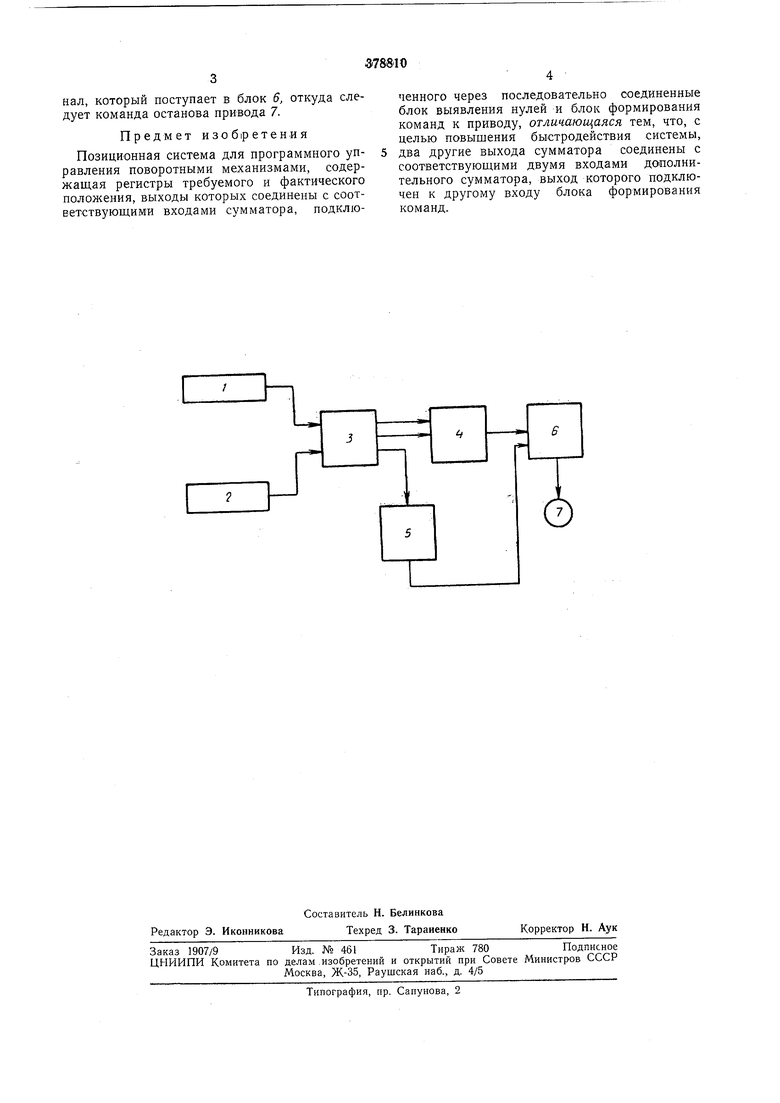
На чертеже представлена блок-схема предлагаемой системы.
Она содержит регистр 1 требуемого положения и регистр 2 фактического положения, сумматор 3, второй сумматор 4, блок 5 выявления нулей, блок 6 формирования команд для управления - приводом 7 поворотного механизма.
Работает система следующим образом. В регистр / требуемого положения заносится прямой, а в регистр 2 фактического положения обратный двоично-десятичный код 8421. В результате сложения двух чисел на выходе сумматора 3 образуется величина рассогласования в коде 8421 с избытком 3 и его знак. При разбивке длины окружности поворотного механизма на 1000 частей, например длины
окружности револьверной головки дыропробивного пресса, половина окружности составляет 500 частей. В коде 8421 с избытком 3 число, меньшее 500, например 499, записывается; 0111 1100 1100; число, равное или большее
500, например 500: 1000 ООП ООП. Следовательно, наличие единицы или нуля в четвертом разряде старшей тетрады может определять, меньше или больше (равна) величина рассогласования половины окружности, т. е. 500.
Сигналы «знак сумматора и «наличие-отсутствие единицы в четвертом разряде старшей тетрады сумматора 3 по соответствующим шинам поступают на второй сумматор 4,
осуществляющий сложение по модулю 2. На выходе сумматора образуется сигнал, определяющий знак поворота револьверной головки в кратчайщем направлении. При величине рассогласования нулевого
значения бло;к 5 выявления нулей выдает сигнал, который поступает в блок 6, откуда следует команда останова привода 7.
Предмет изоб|ретения
Позиционная система для программного управления поворотными механизмами, содержащая регистры требуемого и фактического положения, выходы которых соединены с соответствующими входами сумматора, подключенного через последовательно соединенные блок выявления нулей и блок формирования команд к приводу, отличающаяся тем, что, с целью повыщения быстродействия системы, два другие выхода сумматора соединены с соответствующими двумя входами дополнительного сумматора, выход которого подключен к другому входу блока формирования команд.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления поворотным механизмом | 1979 |
|
SU860008A1 |
| Устройство для умножения | 1988 |
|
SU1578711A1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ КВАДРАТНОГО КОРНЯ | 1973 |
|
SU408305A1 |
| Устройство для умножения | 1988 |
|
SU1670685A1 |
| Устройство для контроля экспоненциальных процессов | 1984 |
|
SU1282087A1 |
| Цифровой регулятор | 1985 |
|
SU1293695A1 |
| Преобразователь двоичного кода в двоично-десятичный и обратно | 1975 |
|
SU708344A1 |
| Устройство для передачи информации | 1975 |
|
SU714494A1 |
| Устройство для умножения | 1985 |
|
SU1309019A1 |
| Устройство для умножения | 1982 |
|
SU1157542A1 |
