Изобретение относится к цифровым автоматическим устройствам и может использоваться в системах автоматического управления, содержащих поворотные механизмы, служащие для вывода объекта управления в заданную точ ку или сектор, а также сканирования в секторе с автоматически регулируемой скоростью. Известны аналого-цифровые следящи устройства, в основу работы которых положен импульсный принцип. Обязательными органами их являются генера тор и счетчик импульсов, что приводи к усложнению систеьи, увеличению аппаратурных затрат, стоимости и сниже нию надежности работы 1. Наиболее близкой к предлагаемой является позиционная система для программного управления ПОВОРОТНЫМИ механизмами, содержащая регистры тре буемого и фактического положения , выходы КОТОРЫХ соединены с соответствующими входами основного сумматора, подключенного через последовательно соединенные блок выявления нулей и блок формирования команд к приводу. Пля повышения быстродействи в систему введен дополнительный сум матор, два входа которого сое.цинены соответствующими двумя выходами основного сумматора, а выход подключен к входу блока формирования команд. В регистры требуемого и фактического положения заносится прямой и обратный двоично-десятичные коды 8-4-2-1. В результате сложения двух чисел на выходе основного сумматора образуется рассогласования в коде 8-4-2-1 с избытком 3 и его знак. Наличие единицы или нуля в четвертом разряде старшей тетрады определяет меньше или больше (равна) величина рассогласования половины окружности. Сигналы Знак -сумматора и Наличиеотсутствие 1 поступают на дополнительный сумматор, где путем сложения по модулю, два определяется кратчайшее направление поворота. При нулевом значении величины рассогласования блок выявления нулей выдает сигнал на остановку привода 2. Однако в такой системе скорость движения не регулируется, что не позволяет исключить перебег точки останова поворотного механизма, и сама она работает в двоично-десятичном коде 8-4-2-i с избытком 3, что определяет избыточность оборудования.
а следовааельно меньшую надежность и большую стоимость, а также меньшую Ътатнческую точность по сравнеииюс системами, работающими в обычном ддвоичном коде при той же р)азрядкости
Lejib изобретеьия - расширение функциональных возможностей„
Поставленная цель достигается тем что в устройство для программного yпpaвлeни поворотным механизмом, содержащее регистр фактического положения поворотного механизма и последовательно соединенные первый логический блок, cyNTMaTop-H блок формирования команд управления, введены триггер и второй логический блок, выходом соединенньп со вторым входом блока выдачи команд, третий вход которого соединен с первыми выходами тригг-ера, вторыми выходами подключен1юго к первым входам первого логического блока, гггорые и треть входы KOTopoio являются Бхода.м.и устройства, выходд-л регистра фактическог положения поворотного мехаггизма с;ое-динены со вторыми входами сумматора, вторые выходды которогс 1;одключе1-1ы ко входам триггера и первым входам второго логического Ьлока, вторыми входами соединенного с реаьими сумматора
1а чертеже представлена функциональная схема предлагаемо1Х) устройства
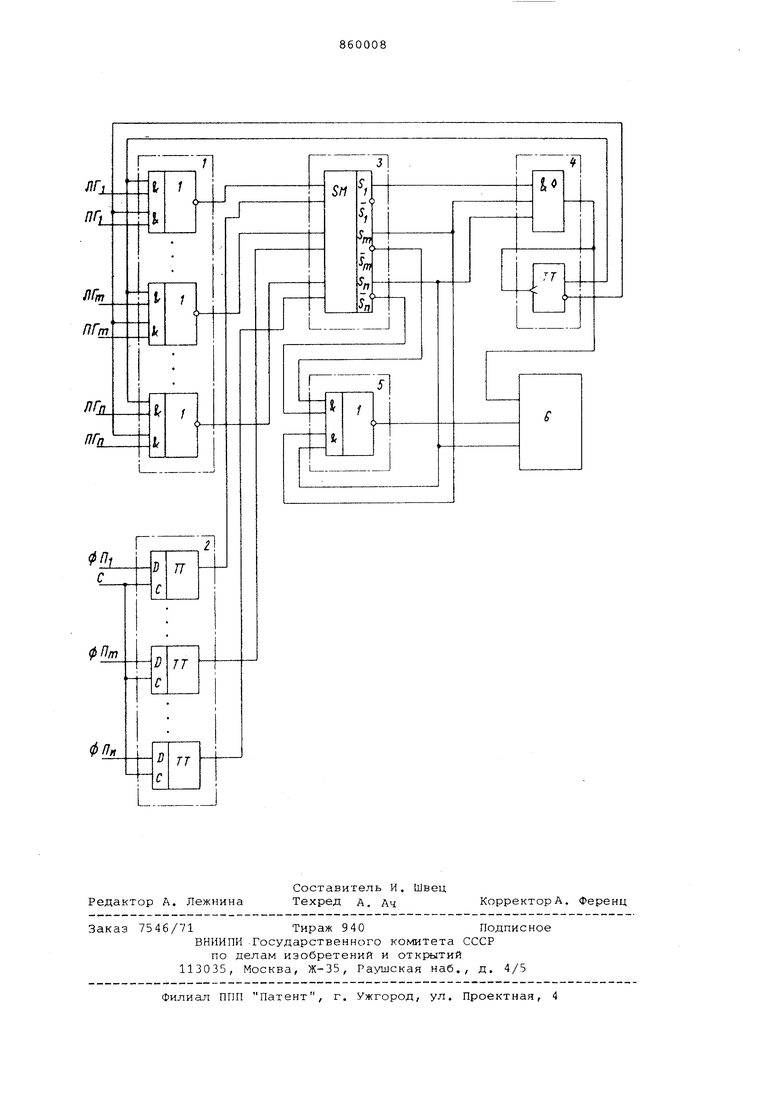
Устоойство С1деожит псовый ческий блок 1, тритгерпый рагистр 2, сумматор 3, три;ч-ер 4. в .горой логический блок 5 и блок 6 формирования команд управленр-гя к приводу.
Первый логический б.г;ок 1 осуществляет поочередное пропус ание заланных ГРДВГИД и состоит и:,: набора логических элементов 2И-2И)И-НЕ, на первые входы ; OTOpriix, соединенные с ДЗУ подаются Tpe6ve. n.5,:i;;Hn сектора ЛГ| и , (где JU - .:еза;т границ csKTOVvar ПГ ,, - ; :;-О1;ан граница сектора), п()г;чс;редиос пропускание которых осуществляется сигналг1М с Tpwi repui А. вторые входил лOiичecкo; 2И-2ИЛИ Чп, обратный код Б;:- бранноГ границы с выхода блжа юступает на первые входы сумматора 3.
Триггерный регистр 2 осу:цесткл){:Т запоминание кода фактическо;:о положения (ФП) поворотного мех.;-)низма и состоит из ликейки трипперов, входы которых по.ясоединепы к соответстByioau-J м в 1-J кодам п. ре обр а: о в а т ел я У ГХ)Л КОД, заггись информации производится по сигнгъту cинxpoн i:зauии С, подаваемому с того же преобразсувателя. ВыхохДЕ триггерного регистра соединены со вторыми входамо--: сумт-/ атора 3; осуществляющего сложен -:е двух двоичных п-раэрядных чисел, Выходк;; гюследнего подключе}1Ы к соответствующим входам
триггера 4 и к входам логического блока 5. Кроме того, инверсный выход старшего разряда сумматора подключен к соответствующему входу блока 6 формирования команд управления.
Триггер 4 предназначен для выработки разрешающих сигналов, подаваемых на первый логический блок 1 в момент совпадения требуемого и фактического положения поворотного механизма, и состоит из Т-триггера и схемы Монтажное И, входы которой подключаются к выходам сумматора 3, выход - на счетный вход триггера и одновременно к блоку 6, выходы триггера Q и Q подключаются к соответствующим вторым входам блока 1,
Второй логический блок 5 предназначен для анализа значений соответствую1цих разрядов сумг- атора 3 и производит вьщачу управляющих сигналов в блок 6, состоящий из логических элементов 2И-2ИЛИ-НЕ и предназначенный для формирования дополнительных команд к приводу о кратчайlUeM ьаправлении вращения, величине скорости отработки и сигнала останова ,
Устройствхо работает следующим образ ом.
При разбивке длины окружности движе.чил объекта на 2 частей каждо части однозначно соответствует п-рарядный код. При сложении кодов требуемого и фактического положения поворотного механизма наличие единицы и-151 нуля в старшем разряде кода а ; ; :ходе cyMjMaTOpa позволяет опрелолить больше (равна) или меньше - J ;:; р. и чина расе о г л а с; о в а и и я по л овин ы окружности, г,е, сразу определяется кр-атчаишее направление вращения привода.
Анализ состояния прямых и инверсных вкхоков старших разрядов сумма;;oi:ia 3 по логической схеме F -- .... X,,, V У.у„..,Х, (где гп п) :1О31золяет осуществить изменение cKopocTvi вращения привохта в зависимс.сти от вс-личины угла рассогласо ; а -:ия в диапазоне скоростей от V, до 0. Так, при Г; 4 анализ содержи;-.г:.чо дзух старших разрядов позволяе -ггогическои схеме регулирования скоpjCTH кьдхавать сигнал на уменьшение Скооости 1.:ри углах рассогласования леньшо
В обц1ем случае количество разря,п,ов двЛИЧНОГО кода определяется требуемой статической точностью страоотки угла (при п 1 статическая топюсть равна 22,5, при п 12 0,0878) „
п-разрядное значение кодов грани сектора сканирования (левая )1Г и иравал ПГ,- ) поступают из запо -тинаю;ii.ero устройства (ЗУ) в параплельном прямом двоичном коде в блок 1. В
зависимости от состояния выходов триггера совпадения границ, параллельный обратный код выбранной границы поступает на соответствующие входы сумматора 3 в виде первого слагаемого. Вторым слагаемым является значение кода фактического положения механизма (ФП).
В результате сложения двух чисел на выходе сумматора 3 образуется двоичный код, анализируя который определяем величину угла рассогласования. Появление на инверсном выходе старшего разряда сумматора нулевого потенциала (нуля) является сигналом в блок б на отработку движения в реверсивном направлении. (Движение по часовой стрелке условно принято за прямое, против - за реверсивное). Блок 5 решает уравнение равнозначности и выдает сигнал в блок формирования команд на изменение скорости.При совпадении значений кодов требуемого и фактического положения, снимаемых с триггерного регистра и схемы пропускания, все прямые выходы сумматора 3 будут в единичном состоянии. Анализ состояния прямых выходов сумматора осуществляется триггером 4. В момент совпадения кодов триггер 4 изменяет свое состояние (работает в режиме Т-триггера). Единичные потенциалы прямого или инверсного выходов триггера являются разрешающими сигналами для ввода второй (первой) границы сектора сканирования и запрещения ввода первой (второй).Одновременно сигнал с выхода триггера 4 выдается в блок б формирования команд как сигнал останова. При введении одинаковых значений кодов левой и правой границ сектора сигнал останова выдается постоянно после выделения поворотного механизма в заданную точку.
При заданном с помощью ЗУ ряда границ можно осуществить их последовательное автоматическое введение в устройство управления. Сигналы на разрешение ввода в этом случае можно снять не с триггера, а с шифратора, единичное состояние выходов которого будет определять ввод соответствующей границы.
Таким образом, после несложных преобразований в схеме устройство управления позволяет осуществить
автоматический, полуавтоматический и ручной режим работы.
Положительный эффект изобретения определяется повышением эффективности работы системы, расширением ее функс циональных возможностей и упрощением ее аппаратурной реализации за счет введения в устройство триггера второго логического блока, позволяющего выполнять более точную отработку заданного угла. За счет возможности регулирования скорости вращения поворотного механизма уменьшается перебег в момент останова. Автоматическое сканирование в пределах заданного сектора осуществляется с более высокой точностью при уменьшенных механи1еских и электрических нагрузках на механизмы привода.
20
Формула изобретения
Устройство для программного управления поворотным механизмом, содержащее регистр фактического положения
поворотного механизма и последовательно соединенные первый логический блок, сумматор и блок формирования команд управления, отличающееся тем, что, с целью расширения функциональных возможностей устройства, в него введены триггер и второй логический блок, выходом соединенный со вторым входом-блока выдачи команд, третий вход которого соединен с первыми выходами триггера,
вторыми выходами подключенного к первым входам первого логического блока, вторые и третьи входы которого являются входами устройства, выходы регистра фактического положения поворотного механизма соединены со вторыми входами сумматора, вторые выходы которого подключены ко входам триггера и первым входам второго логического блока, вторыми входами соединенного с третьими выходами сумматора
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 378804, кл. G 05 В 15/02, 1971.
2. Авторское свидетельство СССР № 378810, кл. G 05 В 19/30, G 05 В 15/02, 1971 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
| ПОЗИЦИОННАЯ СИСТЕМА ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПОВОРОТНЫМИ МЕХАНИЗМАМИ | 1973 |
|
SU378810A1 |
| Цифровое устройство для автоматического управления движением шахтной подъемной машины | 1969 |
|
SU475336A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| УСКОРЕННЫЙ УМНОЖИТЕЛЬ НА НЕЙРОНАХ | 2006 |
|
RU2322688C2 |
| Устройство для программного управления электроприводом | 1985 |
|
SU1260919A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
| Микропрограммное устройство управления | 1983 |
|
SU1108449A1 |
| Устройство для имитации грозовогофРОНТА | 1979 |
|
SU842930A2 |
| Устройство для формирования кодовых описаний изображений объектов | 1983 |
|
SU1080162A1 |