1
Предлагаемое изобретение относится к технике измерения малых моментов и предназначено для точного измерения момента авгоротации, создаваемого сферическим аэростатическим подвесом.
Известные способы измерения момента сферического аэростатического подвеса позволяют обнаружить момент авторотации, лишь превышающий момент от неуравновешенности ротора.
Предлагаемый способ отличается тем, что для повышения точности и расширения диапазона измерения поворачивают ротор вокруг вертикальной оси, определяют его горизонтальные угловые отклонения и по разности максимального и минимального отклонений судят об искомом мо.менте, а по относительному расположению ротора и опоры подвеса в момент максимального углового отклонения- о его направлении.
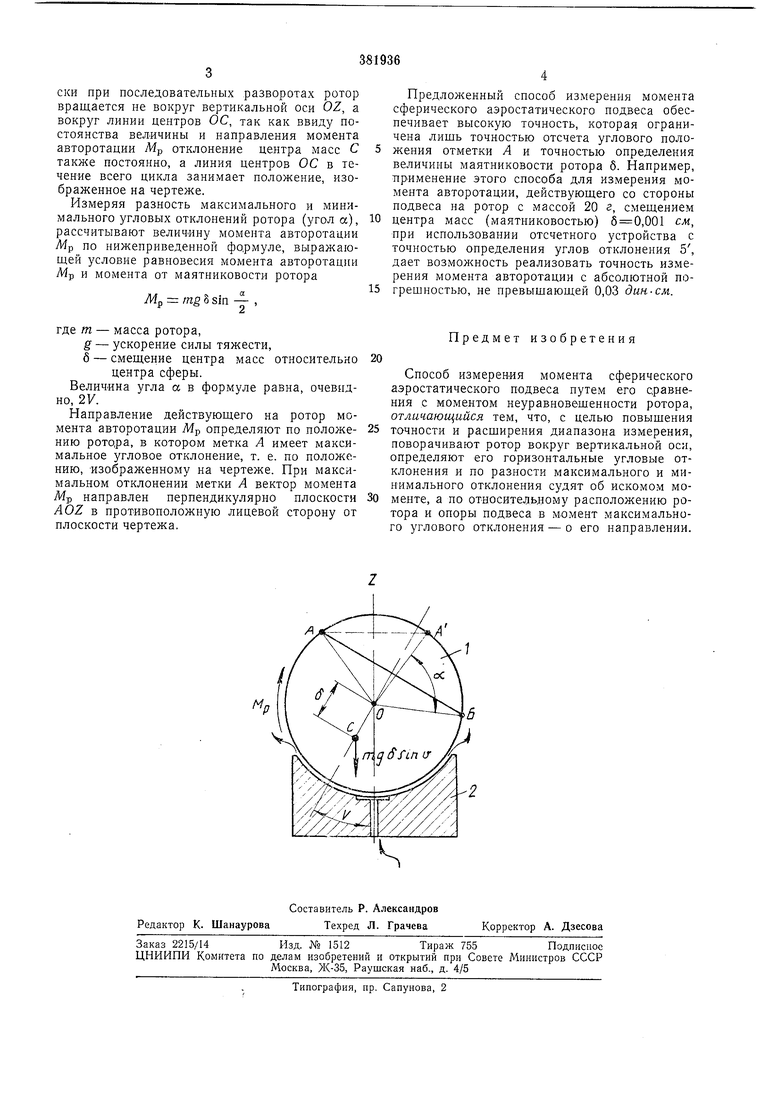
Способ поясняется чертежом, где изображены ротор, находящийся в опоре аэростатического подвеса, а также показана схема взаимодействия моментов.
На ротор /, помещенный в опору подвеса 2, действует момент авторотации Мр, величину и направление которого надлежит определить. Момент Мр связан с асимметрией воздушного потока, обтекающего ротор /, и при любом угловом полол ении ротора / сохраняют
свою величину и направление, показанное стрелкой. Под действием момента М ротор /, имеющий маятниковость (смещение б центра масс С относительно центра сферы О), отклопяется Oj положения, которое он занимал бы при отсутствии момента авторотации (линия центров ОС - вертикальная), на угол в направлении действия момента Мр. Плоскость COZ при равновесии ротора всегда перпендикулярна вектору момента Мр (на чертеже не показан).
Измерение момента авторотации Мр по предложенному способу производят следующим образом. На поверхность ротора / наносят в произвольном месте отметку А, благодаря которой можно следить за угловыми перемещениями ротора / (в качестве метки А могут быть использованы легко различимые элементы конструкции ротора /). Сообщая
ротору последовательно .малые развороты относительно вертикальной оси OZ и добиваясь в калсдом нолол ении равновесного состояния (отсутствия колебаний и непрерывного вращения) следят за угловым полол ением отметки Л в вертикальной плоскости (т. е. измеряют, например, угол AOZ. После совершения ротором полного оборота метка А описывает в пространстве замкнутый круг АБ, плоскость которого наклонена к плоскости горизонта
на угол V. Это объясняется тем, что фактиче
| название | год | авторы | номер документа |
|---|---|---|---|
| Балансировочное устройство | 1971 |
|
SU439715A1 |
| Способ статической балансировки ротора,размещенного в газостатических опорах | 1980 |
|
SU896436A1 |
| Способ уравновешивания сферических роторов | 1973 |
|
SU455257A1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ОТКЛОНЕНИЙ ОСИ ВРАЩЕНИЯ ОБЪЕКТА | 1991 |
|
RU2068990C1 |
| Устройство для уравновешивания изделий | 1978 |
|
SU763711A1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР И СПОСОБ РЕГУЛИРОВКИ ЕГО ДРЕЙФА | 1996 |
|
RU2114394C1 |
| СПОСОБ ДОВОДКИ ДЕТАЛЕЙ ТИПА ШАРОВЫХ РОТОРОВ | 1971 |
|
SU318469A1 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ СТЕНДА ДЛЯ ОПРЕДЕЛЕНИЯ МАССО-ЦЕНТРОВОЧНЫХ И МАССО-ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК ТВЕРДОГО ТЕЛА ВРАЩЕНИЯ | 2010 |
|
RU2445592C1 |
| Прецизионный газостатический шпиндельный узел | 2021 |
|
RU2771708C1 |
| КООРДИНАТНО-ИЗМЕРИТЕЛЬНАЯ МАШИНА | 1990 |
|
RU2068984C1 |
