1
Изобретение относится к устройствам автоматизации мобильных сельскохозяйственных агрегатов.
Известные устройства для автоматического направления движения трактора, содержаш;ие копирующий щуп и следопрокладчик для прокладки гибкого элемента по полю, укрепленный на боковой консоли, на полевых работах не обеспечивают движение агрегата с беспетлевыми поворотами.
Цель изобретения - обработка поля гоновым способом с беспетлевым.и поворотами.
Это достигается тем, что следопрокладчик выполнен с возможностью перемещения вдоль консоли посредством гибкого элемента, связанного с барабаном, управляемым электромагнитной реверсивной муфтой, приводимой от полуоси ведущего колеса трактора.
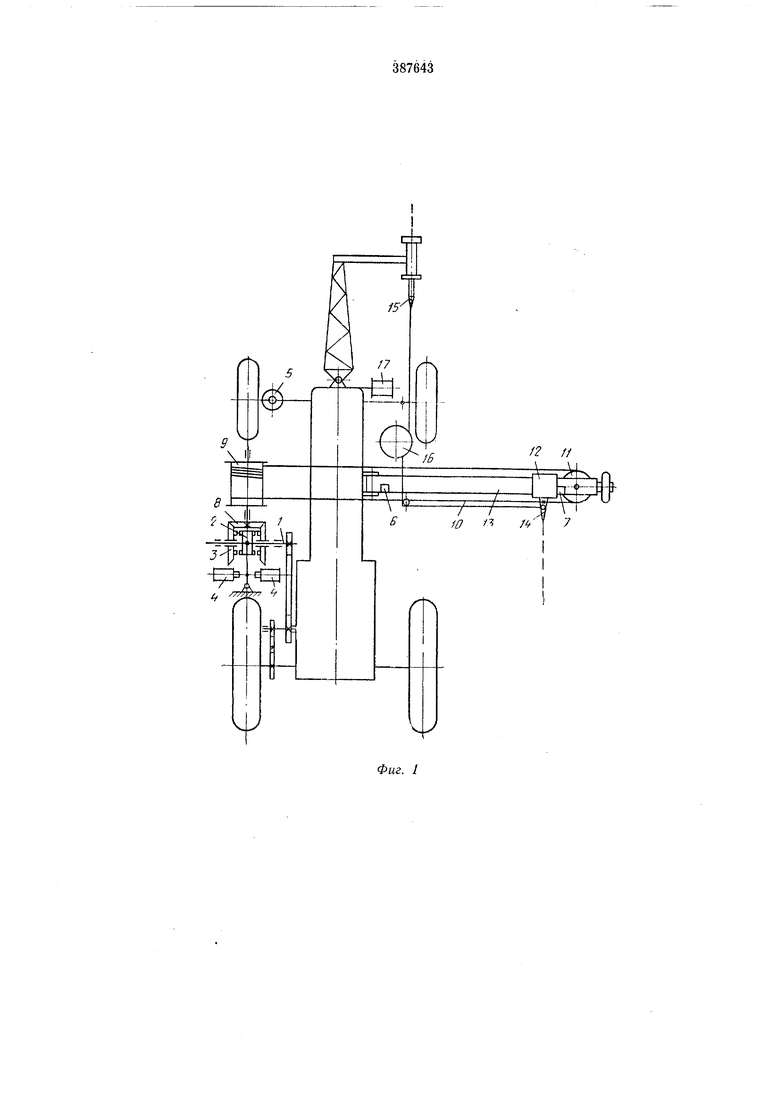
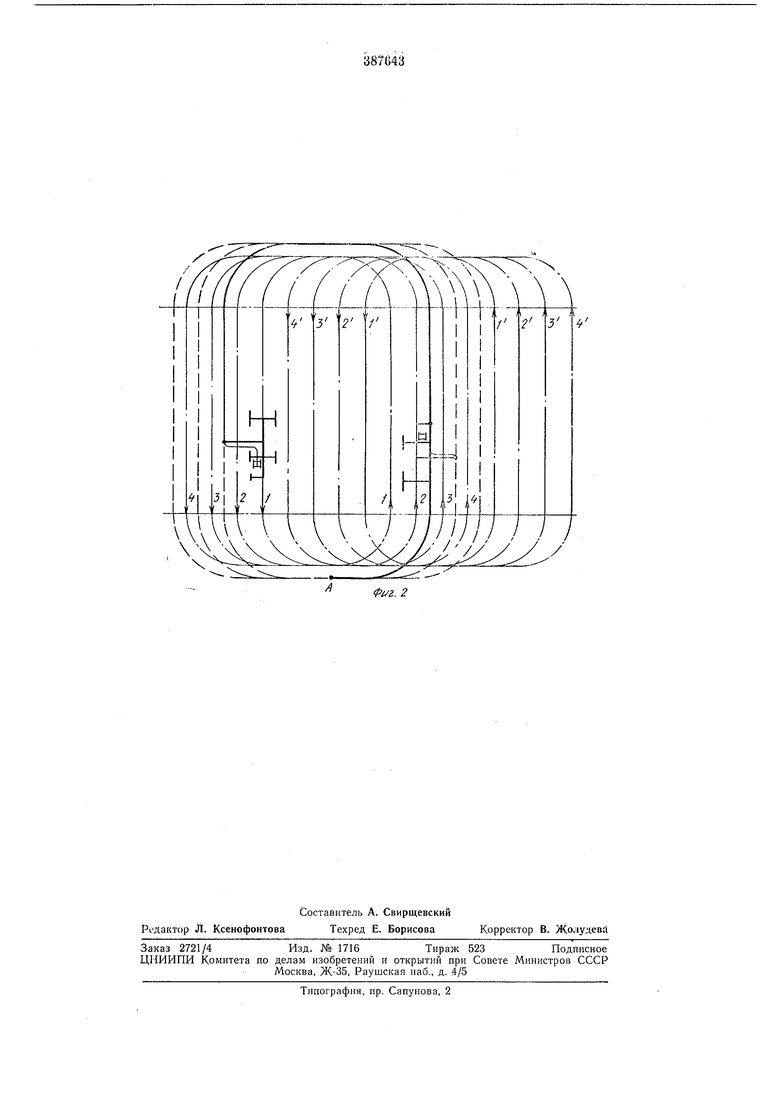
На фиг. 1 показана общая схема предлагаемого устройства; на фиг. 2 - схема движения агрегата но обрабатываемому полю (1, 2, 3, 4, Г, 2, 3, 4 - норядок проходов агрегата по полю).
От полуосн ведущего колеса трактора через передачу приводится во вращение вал /. На валу установлены кулачковая полумуфта 2 на щлицах и конические щестерни 3 на подщинпиках, каждая из которых снабжена кулачковой нолумуфтой. Полумуфта перемещается по шлицам электромагнитами 4, к которым
электрический сигнал поступает от датчика угла поворота управляемых колес 5 или от конечных выключателей 6 и 7. Конические щестерни находятся в зацеплении с щестерней 8, расположенной на одном валу с барабаном 9. На барабане кренятся оба ко1ща троса 10, проходящего через ролик //. С тросом связана каретка J2, которая может перемещаться по направляющей 13. Каретка содержит следонрокладчик 14. При задании программы движения агрегата гибким элементом он проходит через щуп 15, компенсатор 16 и следопрокладчик. В транснортиом положенин гибкий элемент намотан на барабаи 17.
Перед началом работ на обрабатываемом nojiC конец гибкого элемента с барабана 17 пропускается через следопрокладчик и крепится к колыщку в точке Л. Во время первого прохода гибкий элемент разматывается с барабана и укладывается в почву на расстоянии от точки копировапия, равном ширине захвата агрегата. В коице первого прохода агрегат останавливается. Конец гибкого элемента, который был прикреплен к колышку, нропускается через щуп и соединяется с другнм его концом, который находился на барабане 17. Таким образом, получается замкнутая базовая линия, выложенная гибким элементом. Второй, третий и четвертый нроходы осущестпляются автоматически. В начале последнего
прохода агрегат останавливается гибкий элемент разъединяется и конец подбираемой ветви его закрепляется на барабане 17.
При автоматическом вождении агрегата вдоль гона гибкий элемент, которым выложена базовая линия задаваемой программы движения, подбирается щупом и снова укладывается следопрокладчиком в почву на расстоянии от точки копирования, равном ширине захвата агрегата.
При выходе агрегата с гона на новоротную полосу управляющие колеса поворачиваются на определенный угол. От датчика поворота колес поступает сигнал на один из электромагнитов, который вводит в зацепление полумуфту с полумуфтой одной из щестерен 3, которая, в свою очередь, начинает вращаться и приводит во вращение находящуюся в зацеплении с ией щестерню 8, :и, следовательно, барабан 9. При этом каретка перемещается по направляющей, и вместе с ней передвигается следопрокладчик, задавая программу поворота следующего прохода. Каретка со следопрокладчиком, дойдя до конечного выключателя выключает его, тем самым разрывает цепь электромагнита, а нолумуфта нод действием пружины возвращается в нейтральное положение. Барабан не вращается, и каретка со следопрокладчиком останавливается. При выходе агрегата с поворотной полосы на очередной гон от датчика поворота колес сигнал поступает на другой электромагнит, который вводит в зацепление полумуфту с полумуфтой другой шестерни. При этом барабан вращается в другую сторону, каретка перемещается по направляющей в обратную сторону, а вместе с пей перемещается следопрокладчик, задавая программу поворота на очередной гон для следующего прохода.
Пред.метизобретения
Устройство для автоматического направления движения колесного трактора, содержащее копирующий щуп и следопрокладчик для прокладки гибкого элемента по полю, укрепленный на боковой консоли, отличающееся тем, что, с целью обработки поля гоновым способом с беспетлевыми поворотами, следопрокладчик выполнен с возможностью перемещения вдоль консоли посредством гибкого элемента, связанного с барабаном, управляемым электромагнитной реверсивной муфтой, приводимой от полуоси ведущего колеса трактора.
Т и 
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ укладки кабеля, питающего подвижной электроагрегат и устройство для осуществления этого способа | 1957 |
|
SU115592A1 |
| СПОСОБ ДВИЖЕНИЯ АГРЕГАТА ПРИ ОБРАБОТКЕ ПОЧВЫ В ПОЛЕ | 2007 |
|
RU2336681C1 |
| Устройство для поворота трак-ТОРНыХ АгРЕгАТОВ | 1979 |
|
SU808024A1 |
| Устройство для автовождения машинно-тракторных агрегатов | 1986 |
|
SU1405719A1 |
| Поливальщик автоматический фронтальный | 1979 |
|
SU886851A1 |
| Устройство для автоматического управления движением самоходного шасси | 1981 |
|
SU1090275A1 |
| АГРЕГАТ ДОЖДЕВАЛЬНЫЙ КОНСОЛЬНЫЙ | 2003 |
|
RU2234214C1 |
| СТАНОК ДЛЯ НАРЕЗАНИЯ ЗУБЬЕВ КОНИЧЕСКИХ КОЛЕС | 1973 |
|
SU390703A1 |
| Угломерная радионавигационная система автовождения машинно-тракторного агрегата | 1988 |
|
SU1630625A1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
L
J
ж
/ /
X/7 / /
Ф«г. /
И
L
