(54) УСТРОЙСТВО ДЛЯ ПОВОРОТА ТРАКТОРНЫХ АГРЕГАТОВ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматизированного поворота тракторного агрегата | 1979 |
|
SU988212A1 |
| Устройство для управления движением трактора | 1980 |
|
SU873908A1 |
| Устройство для автовождения машинно-тракторных агрегатов | 1986 |
|
SU1405719A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Система автоматизированного вождения машинно-тракторных агрегатов | 1982 |
|
SU1060130A1 |
| Устройство для автоматического поворота тракторного агрегата | 1977 |
|
SU727169A1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| Угломерная радионавигационная система автовождения машинно-тракторного агрегата | 1988 |
|
SU1630625A1 |

1
Изобретение относится к устройствам для автоматизированного управления движением мобильных сельскохозяйственных колесных машинно-тракторных агрегатов при выполнении полевых механизированных работ и может быть применено для автоматизации выполнения поворотов колесными тракторами в агрегате с прицепными, полунавесными и навесными сельскохозяйственными машинами.
Кроме того, оно может быть использовано для автоматизации вождения колесных тракторов в составе комплексно автоматизированного машинного агрегата.
Известно устройство для автоматизации поворота травторного агрегата, включающее исполнительные механизмы для привода в движение органов управления трактора, программное устройство, содержащее профилированный диск с редуктором и путеизмерительным колесом. Г1рофилированный диск связан системой тяг с контактным устройством усилителей механизма поворота и через гибкий вал с путеизмерительным колесом или же посредством шагового двигателя с импульсным датчиком скорости 1.
Недостатками известного устройства является то, что и его нельзя применять для автоматизации вождения трактора в агрегате с навесной машиной, а также то, что для изменения программы необходима замена профилированного диска и приводного редуктора.
Наиболее близким по технической сущности к предлагаемому является устройство, содержащее исполнительный механизм, усилитель мощности, программньш блок, регулятор интенсивности управляющего воздействия, ограничители углов поворота направляющих колес. Программный блок выполнен в виде моста сопротивления, в одно плечо которого включен магазин потенциометров с шаговым искателем и переключатель элементов программы, в другое - гироскопический датчик обратной связи и интегрирующее звено, а в диагональ моста - формирователь улравляющего сигнала, соединенный с входом усилителя мощности, причем формирователь управляющего сигнала имеет связь с переключателем элементов программы 2.
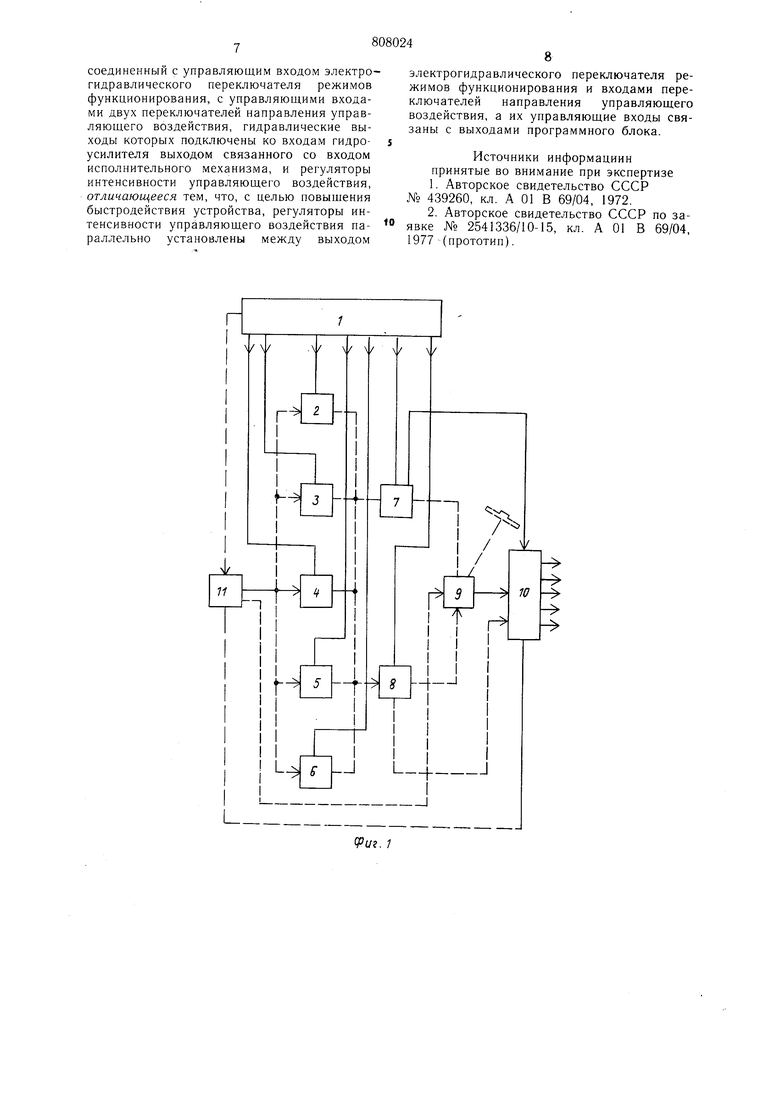
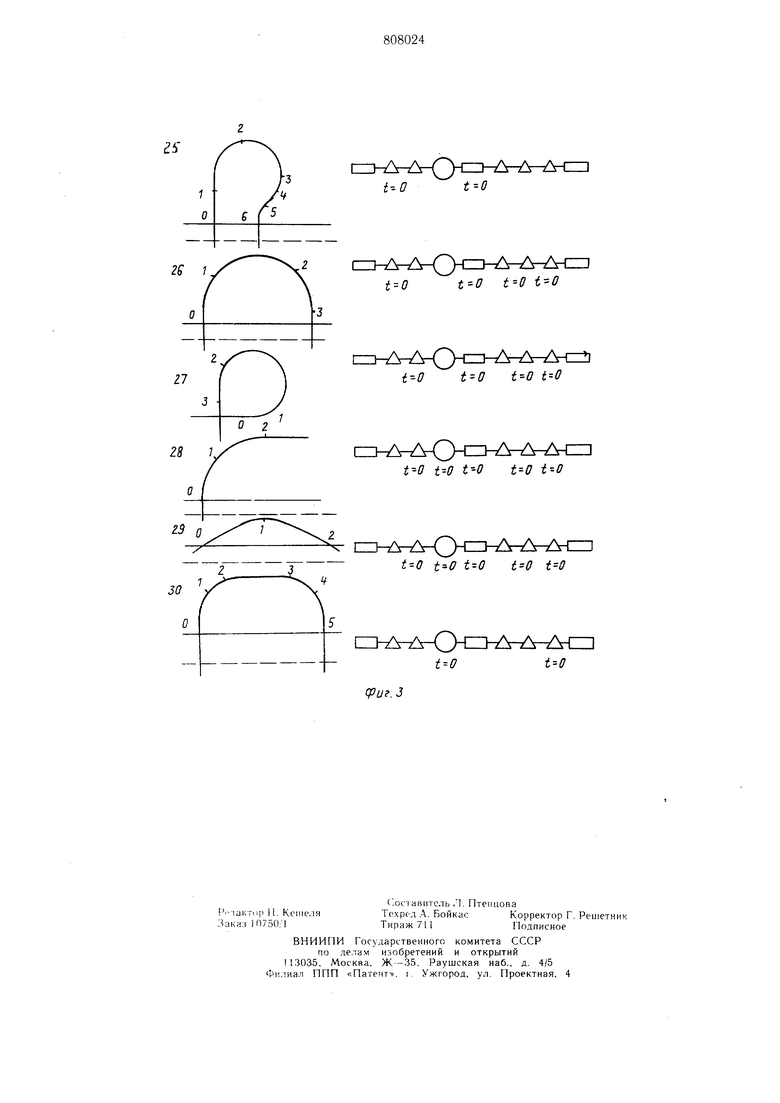
Недостатком известного устройства является то, что для реализации любого вида поворота с оптимальными по затратам времени кинематическими режимами и параметрами необходимо автоматически задавать различные значения интенсивности управляющего воздействия на каждом участке переменной кривизны, что выполнить достаточно сложно. К недостаткам известного устройства можно отнести также отсутствие обычного ручного управления с механической связью между рулевым колесом и механизмом управления. Применение программного блока в виде магазина потенциометров с шаговым искателем и обратной связью по углам поворота продольной оси трактора и направляющих колес предусматривает наличие большого числа контактов. Цель изобретения - повышение быстродействия устройства для поворота тракторных агрегатов. Указанная цель достигается тем, что в устройстве для поворота тракторных агрегатов, содержашем программный блок, соединенный с управляющим входом электрогидравлического переключателя режимов функционирования, с управляющими входами двух переключателей направления управляющего воздействия, гидравлические выхоД.Ы которых подключены к входам гидроусилителя, выходо.м связанного со входом исполнительного механизма, и регуляторы интенсивности управляющего воздействия, последние параллельно установлены между выходом электрогидравлического переключателя режимов функционирования и входами переключателей направления управляющего воздействия, а их управляющие входы связань с выходами програ.ммного блока. На фиг. 1 изображена блок-схема устройства; на фиг. 2 - схема программного блока; на фиг. 3 - траектории различных видов поворотов. Устройство содержит программный блок 1, связанный с включенными параллельно регуляторами 2--6 интенсивности управляющего воздействия, выполненными, например, в виде последовательно включенных регулируемых дросселей и электрогидравлических кранов, переключатели 7 и 8 напряжения управляющего воздействия, имеющие электрическую связь с программным блоком 1 и гидравлическую -- с регуляторами 2 - 6 интенсивности управляющего воздействия, исполнительный механизм, роль которого выполняет цилиндр гидроусилителя 9, имеющий гидравлическую связь с переключателями 7 и 8 направления управляющего воздействия и механическую - с органами ручного управления. Устройство содержит такой объект управления трактора 10, который через механизм рулевого управления и гидроусилитель 9 связан с устройством и через электрогидравлический переключатель 11 режимов функционирования устройства питает его электрической и гидравлической энергией. Програ.ммный блок 1 состоит из реле 12-20 времени, составляющих последовательную цепочку задержки управляющих сигналов, имеющих возможность независимой регулировки времени каждого и связь с логической схемой 21. Завершает цепочку задержки управляющего сигнала из реле 12-20 времени звуковой генератор 22, питание всех цепей осуществляется через стабилизатор 23 напряжения. Реле 20 времени имеет также связь с пультом 24 дистанционного управления, расположенным в кабине трактора 10. Пульт 24 дистанционного управления предназначен для переключения режимов работы программного блока 1 и имеет связь с реле 12 времени Логическая схема 21 состоит из логических элементов И, ИЛИ, НЕТ, ИНВЕРСИЯ и других и предназначена для npjieMa запрограммированной информации в виде электрических импульсов от реле 12 - 20 времени, преобразования ее и выдачи управляющих сигналов на вход элементов устройства. Программный блок 1 осуществляет автоматический поворот мащинно-тракторных агрегатов на поворотной полосе с использованием принципа программирования по времени методом синтеза требуемой траектории поворота из унифицированных элементов. Траектория любого вида поворота состоит из участков переменной кривизны, отрезков прямых и дуг окружности, т. е. из 3-х элементов, которые в различном количестве и в различной последовательности входят в любую траекторию. На фиг. 3 представлены 6 траекторий рациональных видов поворотов и их блок-схемы: петлевой односторонний поворот 25, круговой беспетлевой 26, петлевой на 270° 27, беспетлевой на 90° 28, беспетлевой на угол более 90° и менее 180° 29, беспетлевой с прямолинейным участком 30. Прямоугольниками на блок-схемах траекторий обозначены отрезки прямых, треугольником - участки переменной кривизны, кружком - участки дуги окружности. Знаком X обозначены частные блок-схемы представленных траекторий. Из этих блок-схем путем регулировки длительности движения машинно-тракторного агрегата по каждому участку можно составить одну универсальную схе.му, которую можно привести к любому частному виду. При движении на трактор действуют различные внешние возмущающие воздействия. Трактор имеет нелинейные характеристики. Эти два фактора приводят к изме нению фактических кинематических режимов и параметров движения на повороте относительно номинальных, причем изменение носит вероятностный характер. Несложные расчеты показывают, что вероятность попадания точно в точку 3 кругового беспетлевого поворота 26 составляет около 0,3. Поэтому, если устройство используется только
для автоматизации поворота (т. е. не входит в систему управления комплексно автоматизированного агрегата) и на тракторе имеется водитель, то наиболее целесообразно выбрать на траектории точку, когда основная часть пути пройдена, действия водителя уже не могут привести к значительному сокращению времени , отключить автомат, выполнить ручную корректировку траектории и въехать в новый рабочий гон.
Устройство работает следующим образом.
Трактор 10 двигается на рабочем гоне. В момент, когда его ведущие колеса пересекут контрольную линию поворотной полосы, водитель (или специальное устройство системы направления движения на рабочем гоне) нажимает на кнопку пульта 24 дистанционного управления программного блока 1. Это приводит к подаче напряжения от стабилизатора 23 на реле 12 - 20 времени и звуковой генератор 22. Каждое реле времени регулируется на заданную длительность соответствующего элемента универсальной блок-схемы поворота. Одновременно с подачей напряжения включается реле 12 времени и переключатель 11 режимов функционирования устройства. Срабатывание электрогидравлического переключателя 11 приводит к закрытию трубопровода подачи масла от трактора 10 золотниковому распределителю гидроусилителя 9 и открытию трубопровода подачи масла к регуляторам 2 - 6 интенсивности управляющего воздействия. Это блокирует механизм ручного управления гидроусилителем, «запирает направляющие колеса в положении, соответствующем предществующему прямолинейному движению на рабочем гоне. Движение по прямой длится до тех пор, пока управляющий сигнал проходит через реле 12 времени. Как только управляющий сигнал появится на выходе реле 12 времени, логическая схема 21 передает его регулятору 2 интенсивности управляющего воздействия и переключателю 7 направления управляющего воздействия, что приводит к подаче масла через регулятор 2 интенсивности управляющего воздействия, переключатель 7 направления управляющего воздействия в одну из полостей цилиндра гидроусилителя 9. Шток гидроцилиндра через зубчатую передачу воздействует на поворотный вал, что приводит к повороту направляющих колес с заданной угловой скоростью. Реализуется движение по участку переменной кривизны. Появление управляющего сигнала на выходе реле 12 времени приводит к запуску реле 12 времени, которое регулирует продолжительность движения по участку переменной кривизны 1 - 2 кругового беспетлевого поворота 26. Как только на выходе реле 13 времени появится управляющий сигнал, тотчас регулятор 2 интенсивности и переключатель 7 направления управляющего воздействия отключается и одновременно включится реле 14 времени, которое должно регулировать длительность движения по второму участку переменной кривизны траектории, но в данном случае оно отрегулировано на время tt4 0. Поэтому сигнал без задержки по5 ступит на вход реле. 15 времени, которое регулирует длительность движения по дуге окружности. В этот момент направляющие колеса повернуты на угол d (13 - время задержки сигнала реле 13 времени, « - интенсивность управляющего воздействия, заданная с помощью регулятора 2), новый управляющий сигнал не поступает, трактор движется по дуге окружности 1 - 2 траектории 26. С выхода реле 15 времени сигнал поступает на вход реле 16 времени, которое должно задавать длительность движения по участку прямой, но в данном случае оно отрегулировано на время tte О и сигнал без задержки поступает на вход реле 16 времени, которое должно задавать длительность движения по участку прямой, 20 но в данном случае оно отрегулировано на время t(e О и сигнал без задержки поступает на вход реле 17 времени. Одновременно с включением реле 17 времени логическая схема 21 включает регулятор 4 интенсивности и переключатель 8 направления управляющего воздействия. Происхолит поворот направляющих колес в обратную сторону на угол d intiti - Трактор движется по участку переменной кривизны 2 - 3 траектории 26. Если устройство функциони0 РУ полуавтоматическом режиме (водитель находится в кабине), то реле 17 времени задает интервал tfr tj., (здесь 1г.-звремя движения по участку 2 - 3 траектории 26), а реле 18 - 20 времени установлены таким образом, что tio Uo 0. Тот5 час после появления сигналов на выходе реле 1.7 времени включается звуковой генератор 23, который извещает подачей звукового сигнала водителя о заверщении программы и одновременно подачей сигнала на вход пульта дистанционного управления 24 переключает устройство в режим ручного управление. Водитель вручную корректирует траекторию и въезжает в новый рабочий гон.
Аналогично происходит реализация дру5 гих видов поворотов.
Применение автоматического устройства для управления поворотом колесного мащинно-тракторного агрегата на полевых работах повышает производительность агрегатов в среднем на , снижает утомляемость водителя, уменьшает повреждаемость растений на засеянных поворотных полосах, сокращает необходимую щирину поворотных полос.
Фopмt лa изобретения
Устройство для поворота тракторных агрегатов, содержащее программный блок.
соединенный с управляющим входом электрогидравличеекого переключателя режимов функционирования, с управляющими входами двух переключателей направления управляющего воздействия, гидравлические выходы которых подключены ко входам гидроусилителя выходом связанного со входом исполнительного механизма, и регуляторы интенсивности управляющего воздействия, отличающееся тем, что, с целью повышения быстродействия устройства, регуляторы интенсивности управляющего воздействия параллельно установлены между выходом
электрогидравлического переключателя режимов функционирования и входами переключателей направления управляющего воздействия, а их управляющие входы связаны с выходами программного блока.
Источники информациин принятые во внимание при экспертизе
25 о
t--o
t--0 t-O
i--0 t 0 i--0 t--0
t--0 t--0 t--0 t--0 i--0
t--Q
11Ь 7 :НЭ-С А-Д-А Г
t-ot--o
иг.З
