Изоб)етсние относится к механизации сельского хозяйства и может быть использовано для автоматизации вождения мобильных сельскохозяйственных 1ашинных ai peraTOB при выполпении полевых мехапи- зированных работ.
Цель изобретепия - повыц енне качества автовождения на рабочем гоне и поворопгой полосе.
На фиг. I изображена блок-схема предлагаемого устройства; на фиг. 2 блок-
схема коримутатора инфор.мационных каналов; на фиг. 3-6 - схемы траекторий поворотов (3 - круговой бесцетлевой поворот, 4 - беспетлевой поворот с пря.молинейным. участком (3-4), 5 - петлевой односторонний поворот, 6 - угловой поворот на произвольный угол).
Устройство для автовождения ма 11инно- трактор,ных агрегатов содержит датчики I частоты вращения ведущих колес, 2 бокового крена, 3 положения направляющих колес трактора, 4 положения рабочих органов машины, 5 траекторной ошибки, .многоканальный усилитель 6, звуковой сигнал 7 и исполнительный механизм 8 рулевого управления, а также коммутатор 9 информационных каналов, к которому через преобразователи 10 и 1 I частоты в двоичный код подключены датчики 1 частоты вращения ведущих и 12 направляющих колес, через аналого-циф1ро- вые преобразователи 13-- -17 подключены датчики 2 бокового и 18 продольного крена трактора, 3 положения направлнюни .х колес 19 - веса рабочей мащины, 20 силы тяги, а также датчики 4 положения рабочих органов машины и 5 траекторной ошибки, к шинам об.мепа информацией (на чертеже показаны стрел ;.ами) Г1одк: ючена микроЭВМ 21 с терминалом 22, а к выходам - мно -о- ка11аль1;ый усилитель б, соединенный с входом величины, а через цифровой регулятор 23 с входом интенсивности управляющего воздействия исполиительно го мсханиз.ма 8 повооота направляюп;,их колес трактора с исполнительными .механизмами рсгу.ли- рования продольного 24 и поперечного 25 выноса 704Kii :опирования траектории рабочего гона, с вязанных с датчиком 5 траек- торной ошибки :; со звуко;;Ы.м сигналом 7, причем непочтительный механизм 8 поворота направляющих колес трактора имеет дополнительную механическую связь с датчиком 5 тр.аекторной онлкбкк.
Коммутатор 9 информационных каналов содер.к;1т .дешифратор 26 оггератора вво.ча, входом соединенный с выхо.дом микроЭВМ 21, а в1-:ьч:одом - с селектором-мультиплексором 27 информационных каналов, выходом связанным с входом микроЭВМ 21, а также дешифратор 28 оператора вывода, входол- связанный с микроэвм 21, а .выходом - с селектором-мультиплексором 29 каналов выхода, другими входами связанным с микроЭВМ. 21, а выхода. -- с многоканальным усилителем 6.
5
5
0 0
п 5
0
5
В предпочтительном варианте исполнения в качестве датчиков 1,12 частоты вращения ведущих и направляющих колес, 4 положения рабочих органов .машины использовались бесконтактные путевые выключатели типа КВД-6/12.
В качестве датчиков бокового 2 и продольного 18 крена трактора использовались датчики типа ДКБ разработки ВНИИСтрой- дормаша.
В качестве датчика 3 положения направляющих колес трактора использовался датчик типа ДШБ разработки ВНИИСтрой- дормаша.
В качестве датчика 20 силы тяги на крюке использовался датчик усилия сжатия в верхней тяге гидронавесной системы трактора, выполненный в виде пружины и электромеханического преобразователя.
В качестве датчика 5 траекторной ощиб- ки использовалось устройство разработки ВСХИЗО, но может быть использован фотооптический датчик разработки института механики машин АН ГрузССР или другой, например радионавигационный. При этом важно, чтобы датчик выдавал информацию, пропорциональную величине траекторного рассогласования в цифровом виде.
В качестве управляющего устройства 21 и 22 может быть использована любая быст- родействую1цая цифровая микроЭВМ встраиваемый Б технологическое оборудование вариант.
В качестве исгюлнительных механизмов 24 и 25 используются цили;1 дры с элект- роунравляемыми золотниками. Исполнительный .механиз.У; 8 поворота направляющих колес трактора - разработка н изготовление по МТЗ.
Цифровой регулятор 23 интенсивности управляющего воздействия - разработки ВСХИЗО.
Устройслво работает следующим образом.
Посредством TepM i;;a;ia 22 устройство .может функционировать в одном из режимо.у: автовождение на гоне; автовожде1;ие на по- ворогной полосе; подготовка к работе.
Подготовка ;( работе. Вариант А.
д1ля подготовки предлагаемого устройства к работе необходи.мо выполнить сле/1ую- щее.
1.Включить питание управляющего устройства от бортовой электрической сети трактора, после прогрева мккроЭВМ 21 к -течение 3-5 мин посредством клавишно;-, устройства, входящего в состав терминала 22, ввести в нее директиву RUN 1з далном техническом рещении для управления движения М ТА используется алгоритмический язык БЭЙСИК). Микроэвм начнет выполнение первой части программь - ввод исходных данных.
2.На экране дисплея, Бх. также FJ состав тер.минала 22, появится вопрос:
«Какой вид поворота Вы выбираете для данного МТА
Программа для микроЭВМ предусматривает выполнение кругового беспетлевого поворота, беспетлевого с прямолинейным участ- ком и петлевого одностороннего.
Посредством клавишного устройства ввести в микроэвм ответ на ее вопрос, например: «Круговой беспетлевой. Нажать клавишу ;ВК.
3.На экране дисплея появится следующий вопрос: «Какой способ движения Вы выбираете
Программа для микроЭВМ предусматривает реализацию способов движения челноком (или змейкой, различия только в пара- метрах траектории поворота), всвал и враз- вал. В зависимости от ответа на вопрос микроЭВМ управляюш,ее устройство будет реализовывать: при движении челноком - повороты поочередно вправо и влево, всвал - только вправо, вразвал - только влево.
Посредством клавишного устройства ввести в микроэвм ответ, например: «Змейкой. Нажать клавишу :ВК.
4.После нажатия клавиши ;ВК на экране дисплея появится текст инструкции водителю: «Прошу выполнить заезд агрегата
в транспортном положении по размеченной на поверхности поля траектории. Это нужно для ввода параметров поворота в память. Ввод параметров начинается сразу после нажатия клавиши ;ВК.
Выполняя инструкцию водитель должен поднять навесную машину в транспортное положение, а у прицепной - выглубить рабочие органы. Затем включить передачу (можно не рабочую, а более низкую - на ней легче точно проехать по заранее размеченной траектории), начать движение агрегата к поворотной полосе.
При пересечении задними колесами трактора контрольной линии поворотной полосы нажать клавишу ;ВК и вести агрегат по размеченной траектории. В-конце траектории, при вторичном пересечении трактором контрольной линии поворотной полосы, еш,е раз нажать клавишу ;ВК. Процесс ввода в микроэвм параметров траектории пово- рота прекратится.
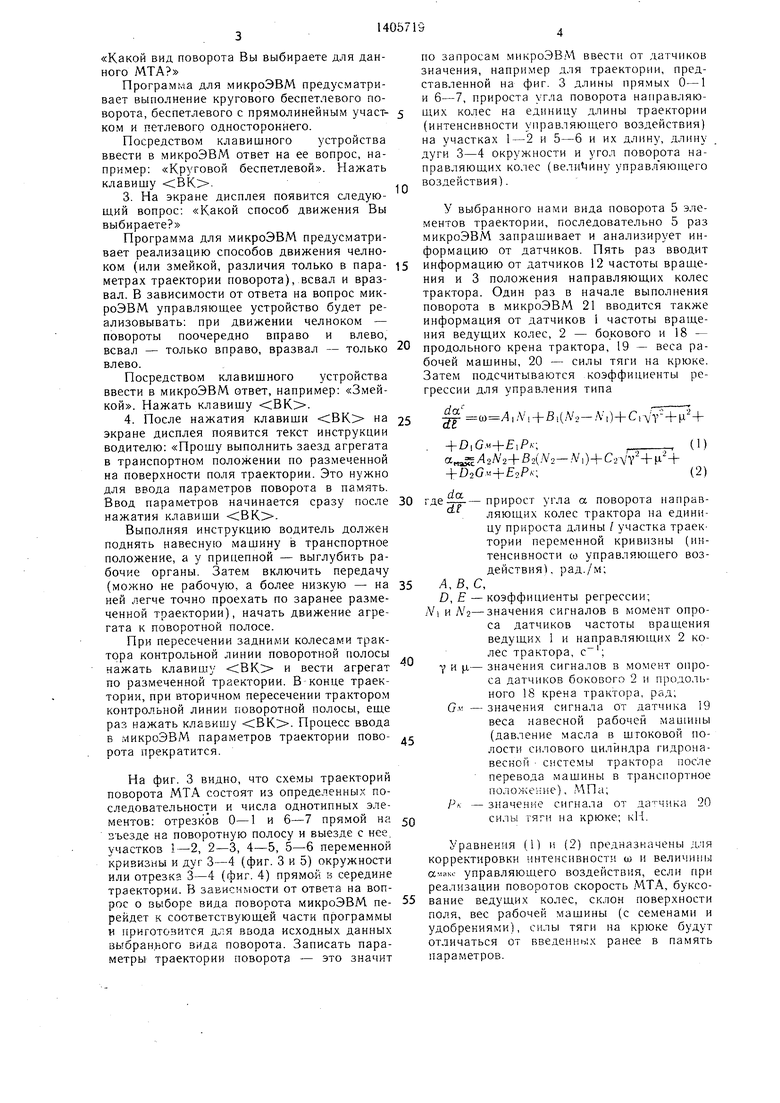
На фиг. 3 видно, что схемы траекторий поворота МТА состоят из определенных последовательности и числа однотипных элементов: отрезков О-1 и 6-7 прямой на зъезде на поворотную полосу и выезде с нее, участков 1-2, 2-3, 4-5, 5-6 переменной кривизны и дуг 3-4 (фиг. 3 и 5) окружности или отрезка 3-4 (фиг. 4) прямай в середине траектории. В зависимости от ответа на вопрос о выборе вида поворота микроЭВМ пе- рейдет к соответствующей части программы и приготовится для ввода исходных данных выбранного вида поворота. Записать параметры траектории поворота - это значит
по запросам микроЭВА ввести от датчиков значения, например для траектории, представленной на фиг. 3 длины прямых О-1 и 6-7, прироста угла поворота направляющих колес на единицу длины траектории (интенсивности управляющего воздействия) на участках 1-2 и 5-6 и их длину, длину дуги 3-4 окружности и угол поворота направляющих колес ( управл яющего воздействия).
У выбранного нами вида поворота 5 элементов траектории, последовательно 5 раз микроэвм запрашивает и анализирует информацию от датчиков. Пять раз вводит информацию от датчиков 12 частоты вращения и 3 положения направляющих колес трактора. Один раз в начале выполнения поворота в микроэвм 21 вводится также информация от датчиков 1 частоты вращения ведущих колес, 2 - бокового и 18 - продольного крена трактора, 19 - веса рабочей машины, 20 - силы тяги на крюке. Затем подсчитываются коэффициенты регрессии для управления типа
)i;V|-fB,(A 2-,V|)+C,VrTi +
+ )|0.м+,Рл-;.,
ar«S 2 2+S2(.V2-/Vl)+C2VV4n4
+ D2G.«-f 2P «; da
(2)
где.-прирост угла а поворота направ- ляющих колес трактора на единицу прироста длины / участка траектории переменной кривизны (интенсивности со управляющего воздействия) . рад./м:
Л, В, С,
D, Е - коэффициенты регрессии; Л ) и Л 2-значения сигналов в момент опроса датчиков частоты врацхения ведущих 1 и направляющих 2 колес трактора,
7 и |j,- значения сигналов в момент опроса датчиков бокового 2 и продольного 18 крена трактора, рад; G.V - значения сигнала от датчика 19 веса навесной рабочей машины (давление масла в шгоковой полости силового цилиндра гидронавесной системы трактора после перевода машины в транспортное положение), МПа;
РК - значение сигнала от 20 силы на крюке; Kli.
Уравнения (1) и (2) предназначены для корректировки интенсивности, ш и величин1 1 а-акс управляющего воздействия, если при реализации поворотов скорость МТА, буксование ведущих колес, склон поверхности поля, вес рабочей машины (с семенами и удобрениями), силы тяги на крюке будут отличаться от введенных ранее в память параметров.
Г), па экране дж-илея гьоявится вопрос: «Будет . 1и повторять заезд по траектории поворота Отвечайте только или . Если по мнению водителя заезд был выполнен неудачно (неточно), то можно на вопро-с микроэвм ответить ;Да и заезд повторить. При этом только что сделанная занись параметров сотрется и на ее место будет записана другая.
Допустим, вводится ответ: «Нет. Нажать клавишу ВК.
6. На экране дисплея появится сообщение водителю: «К работе готова.
Подготовка к работе. Вариант .Б.
Предлагаемое устройство предусматривает возможность предварительного расчета режимов движения и параметров поворотов без заездов по размеченной на поверхности поля траектории. Для этого микроЭВМ оснащается другим программным обеснечение.м (новым или дополненным). Тогда по запро- саг.1 микроЗВМ посредством клавишного устройства терминала 22 водитель вводит исходные данные. Машина выполняет необходимые в этом случае расчеты, полученные результаты вводит в память и использует их в холе автовождепия аналогично описанному.
Автовождение на поворотной полосе.
Водитель вводит МТА а первый рабочий гон, заглубляет рабочие органы и выполняет тех1п)лог :ческую операсчю в течение первого рабочего прохода без liOMOiij.H предлагаемого устройства.
В конце рабочего , в момент пересечения задними .;Vi трактора контрольН.ОЙ Л(-;КИИ iiOBOpf r:-;.;H ПОЛОСЫ, ВОДИТЕЛЬ рЫчагом уаравтйния гидрч навесной системой it T рабочие органы машины. Это к выдаче датчиком 4 положения орга:иов ма1пины через коммут а- 1нформационных каналов сигнала на вход микроэвм 21.
Передача сигналов коммутаторо.м 9 ин- dpopMauKOiiHbix каналов осуществляется с.е дующим образом.
После вь1Г1Ол; ения в указанной последо- вате. Пзмос 1 й операций ги;дготов1 :и .ляк;- . теге устройства к работе г; появления ка )ане дисплея сообщения: «К работе J-OTC- ва микроэвм 2 переводится в cocTO v n;e Г1рерыва;:ня вьп олнения программы. Прерывание работы здесь осущес ; вляется снера I opOM IT -iPIJT. После оператора слсдуе™ адL)ec, по ксугорому будет записано значение вводимой переменное.
Как только на микроЭВМ IIOHEHT- ся д8О 1чкь1Й код оператора INPUT ден1 ф- ратор 26 оператора злода пропустит на в:- од селектора-мультиплексор а 27 инфор: и:,цион- ных каналов адрес переменной. Этот же адрес одновременно является и адресом ветству О Цего информя тронного дагчи; ;:-:.. Получив от дешифратора 26 оператора .ввода разрешение и адрес переменной, селекторвыг;lyблприводи рабочй.х тор 9
5
0
мультиплексор 27 инфор:лационных сигналов передает информацию от соответствующего датчика на вход микроЭВМ 21.
В данном случае, получив сигнал от датчика 4 положения рабочих органов машины, микроэвм начинает управление движения МТА на поворотной полосе --- реализует универсальный алгоритм:
Если то и .
Если , то а а)(( -/i).
Если (, то СС - Ш(/ -г з).
Если , то a const и (3)
Если , то (/-/4).
Если , то а -са(/ -/б).
Если /G(7, то и а)0.
Если . то происходит автоматический переход на режим прерывания работы с одновременным включением на 2 с звукового си1 нала.
Если сх амакс, то w-(signa)0.
Здесь / - текупьее значение суммы сигналов от датчика 12 частоты вращения на- правляюш.их колес трактора - путь, пройденный МТА. от начала поворота, м; - длина представленных на фиг. 3 элементов траекторий поворотов, автоматически введенная в память микроэвм 21 в ходе заезда по размеченной на поверхности поля траектории; ш - интенсивность управляющего воздействия, вычисленная по зависимости (1) с использование.м информации от датчиков, рад/м; а - текуш.ее значение сигнала от датчика 3 положения направляющих колес трактора, рад: «макс - макеи.мальный угол поворота направляющих колес трактора, вычисленный по зависимости (2) с ис- нользованиегл информации от датчиков, рад; sign - знак (плюс, нуль или минус).
Унк версальный алгоритм (3) автовождения МТ.А. на поворотной полосе в общ,ек виде солаержит 7 значений длины эле:-,енто1; траекторий, поэтому при получении на вопрос о выборе вида поворота, например для кругового беспетлевого, лмкроЭВМ 21 в пч- мяти автоматически записывает и . Этим универсальный алгоритм преобразуется к виду алгоритма автовождения iVVFA по траектории выбранного водителем вида поворота -- кругового бес ;стлевого.
Реализация, униаеосального алгоритма (3j автовождения МТА на повооотной полосе осуществляется следую 1:;,;-;м обра:грм.
Коммутатор 9 информационных кана.пов по команде --- запросу .микроЭВМ 21 «опра- п ивает .датчики частоты враще1:.;я веду- 1дих 1 и па)равляюших 12 холес, бокового 2 -: придо./;ьно1-о iS KiieHa, пси1оженкя направ- ,чх KOJiec. веса 19 рабочей машины, си.гь; 20 тяг;; «на крюке. Информация от датчиков .iianHCbiBaeriw и п мпй-; микроЭВМ ; ПС соответствующим адрес::;м.
Пои этом по зависимостям (Пи (2) для н тенсивности и ве.. кмак.- управ. щего воздействия зьшслкяются расчет ы с учетом полученной и}и ;срмации. Одновре
менно в одной ячейке памяти накапливается значение пройденного пути:
l l-}-dl,
где rf/ - число сигналов от датчика 12 частоты вращения направляющих ко- лес трактора за единицу времени.
Одновременно периодически проверяются условия
, (, .
При достижении МТА пройденного пути микроэвм 21 выдает на выход вычнс- ленное значение интенсивности управляющего воздействия. Дещифратор 28 оператора вывода PRINT выдает сигнал - разрешение на один из выходов селектора- мультиплексора 29 каналов выхода. На дру- гие его входы подаются адрес назначения цифрового регулятора 23, значение интенсивности ы управляющего воздействия и ее знак.
Селектор-мультиплексор 29 через многоканальный усилитель 6 передает значение интенсивности со управляющего воздействия на вход цифрового регулятора 23, а его знака - на вход исполнительного механизма 8 поворота направляющих колес. Цифровой регулятор 23 устанавливает подачу соответствующего потока масла на гидравличе- ский вход (в силовой гидроцилиндр) исполнительного механизма 8 поворота направляющих колес трактора. На электрический вход этого исполнительного механизма (па один из двух электромагнитов) подается знак управляющего воздействия. Начинается поворот направляющих колес.
Благодаря тому, что многоканальный усилитель 6 выполнен с триггерами на входах, значения управляющих сигналов сохраняются до их смены другими. Это дает возможность посредством одного коммутатора 9 информационных какалов управлять несколькими исполнительными механизмами.
Одновременно с поворотом направляющих колес микроэвм вычисляет
а(о(/-/,)
Пройденный путь постепенно уве.тичи- вается, пропорционально пути увеличивается и величина а управляющего воздействия.
Одновременно проверяется условие . Как только пройденный МТА путь достигает хранящегося в памяти значения /2, микро- ЭВМ 21 через коммутатор 9 информационных каналов и многоканальный усилитель б выдает на вход цифрового регулятора 23 новое значение интенсивности о) управляющего воздейсгв-ия
(.
Величина управляющего воздействия (угол поворота направляющих колес трак- торг) при этом сохраняется такой, какой она была в момент Непрерывно контролируется выполнение условия .
В момент, когда пройденный МТА путь достигнет , микроэвм 21 через коммутатор 9 информационных каналов, много
0 5
0
5
50
0
55
канальный усилитель 6 выд;1ст на входы цифрового регулятора 23 и ислолпитемьш). механизма 8 новые значения величины п знака управляющего воздействия на направляющие колеса, последние начнут поворачиваться в сторону среднего ноложсния (угол а будет уменьщаться до ).
Контролируется выполнение условия .; В момент, когда пройденный Путь достигнет /6, микроэвм 21 выдаст следую1цее значение интенсивности управляющего воздействия .
При этом проверится условие . Контролируется условие / /7. В момент, когда пройденный путь достигнет , мик- роЭВМ 2 через коммутатор 9 информационных каналов и многоканальный усилитель 6 даст команду включения звукового сигнала 7, а через 2с - выключения. Круговой беспетлевой поворот завершен. Посредством оператора STOP реализация программы прервалась до поступления команды водителя нажатием клавиши ;ВК терминала 22 о переходе в режим автовожден.ия на рабочем гоне.
Автовождение на рабочем i OHC.
Услыщав звуковой сигнал, водите. ш будет информирован об окончании поворота и о переходе управляюн1его устройства на ручного управления направлением движения. По этому сигналу водите.ль должен убедиться в точном въезде МТА в следующий рабочий гон, если нужно, то подкорректировать траекторию агре1 ата, заглубить рабочие органы п нажать па K.iaBiiiiiy ВК на клавшнном устройстве ввода терминала 22. Это приведет к переходу управляющего устройства на ре.ж1 .м автовождения на рабочем гояе.
В режиме автозо 5 дения МТ.4 па рабочем гоне управляющее устройсгво реализует следующий алгоритм:
f(t)(t)dt + {y((4)
i
ш: signf sign(o;
где Т :, Т-2, Тз - постоянные времени интегрирования сигналов от датчиков 5 траекторией ошибки, 3 положения направляю1цих колес, 2 бокового крена трактора соответственно (экспе- ря ментально устаиов.чено, что. например, для культив;;- торного МТА на базе трактора МТЗ-80 наи.тучщее качество автовождения соответствует значениям постоянных времени 0,25, 0,25 и 8 с); Р, а, V - значения еигна,тов от датчиков 5 траекторной ощибкн, 3 положения направлнюндих колес, 2 бокового крена трактора:
А, В - коэффициенты усиления;
(О- интенсивность управляющего воздействия на направляющие ко леса трактора, вычисленная по зависимости (4).
В процессе автовождекия непрерывно описанным образом производится опрос датчиков, вычисление значения и знака интенсивности управляющего воздействия и передача результатов от микроЭВМ 21 через коммутатор 9 информационных каналов и многоканальный усилитель 6 на входы цифрового регулятора 23 и исполнительный механизм 8 поворота направляющих колес трактора.
Исполнительный механизм 8 воздействует на направляющие колеса трактора, с которыми связан датчик 3 положения направляющих колес. Поворот направляю- 1ЦИХ колес приводит к уменьщению траекторного рассогласования и к постепенному уменьщению угловой скорости их поворота, таким образом устранение траекторного рассогласования происходит с минимальным перерегулированием и в режиме затухающих колебаний.
Стабилизации движения МТА на гоне способствует также механическая связь между датчиком 5 траекторной ощибки и направляющими колесами трактора: поворот направляющих колес трактора в сторону базовой борозды гфиводит к соответствующему повороту датчика 5 траекторной ошибки к умс кьщению сигнала траекторного рассогласования е еще до уменьщения собственно траекторного рассогласования, т. е. с упреждением.
Одновременно микроЭВМ 21 вычисляет следующие зависимости: L/ CA/T-bO;V|-fE;
(5) и поперечный
Pr /cfy -f , где и, Р- продольный
BbiHoc точки копирования багзОЕОЙ борозды, м;
С. D, Е, К. Л1, L-коэффициенты регрессии; Л :- частота вращения направляющих колес трактора, с- .
Вычисленные по зависимостям (5) значения гфодольного и поперечного в з;коса 1ОЧКИ копирования подаются от микроЭВМ 21 через коммутатор 9 информационных каналов и .многоканалычый усилитель 6 на входы исполнительных механизмов 24 и 25, которые поддерживают необходимое для высокого качества автовождения положение -датчика 5 траекторной ошибки.
В конце рабочего гона, когда колеса трактора пересекут контрольную линию поворотной полосы, водитель рычагом управления гидронасосной системы выглубляет рабочие органы машины. Это приводи :- выдаче на вход микроЭВМ сигнала от дат чина 4 положения рабочих органов и автоматическому пере;коду управляющего уст
0
5
0
5
0
0
ройства на режим автсво.ждения на ПОБО- ротной полосе. Одновременно автоматически направление поворота меняется на противоположное, так как ранее водителем был вьь бран способ движения змейкой.
Формула изобретения
. Устройство для автовождения мащин- но-тракторных агрегатов, содержащее датчики 1 астоты вращения ведущих колес, бокового 1-рена и положения направляющих колес трактора, положения рабочих органов машины, траекторной ощибки, многоканальный усилитель, звуковой сигнал и исполнительный механизм рулевого управления, отличающееся тем, что, с целью повышения качества автовождения на рабочем гоне и поворотной полосе, устройство содержит датчики частоты вращения направляющих колес, продольного крена трактора и веса рабочей мащины, коммутатор информационных каналов, микроЭВМ с терминалом, исполнительные механизмы регулирования продольного и поперечного выноса точки копирования траектории рабочего гона, цифровой регулятор, два преобразователя частоты в двоичный код и пять аналого-цифровых преобразователей, при этом к входам коммутатора информационных каналов через преобразователи частоты в двоичный код подключены датчики частоты вращения ведущих и направляюидих колес, через аиа- лого- цифровые преобразователи ны датчики бокового и продольного к)ена трактора., положения направляющих колес, веса рабочей мащины и силы тяги, а также датчики положения рабочих органов машины и траекторной ощибки, к шинам обмена информацией подключена микроЭВМ с тер- .ми1-1алом, а к выходам - многоканальный усилитель, соединенный с входом величины, а через цифровой регулятор - с входом интенсивности управляющего воздействия исполнительного механизма поворота направляющих колес трактора, с исполнительными механизмами регулирования продольного и поперечного выноса точк л копирования траектории рабочего гона, сьязан-:ыми с датчиком траектор ЮЙ ошибки, к со звуковым сигнало / , прц|- ем исполнительный механизм поворота направл 1ющкх колес трактора имеет дополнителькую связь с датчиком траекторной ошибки.
2. Устройстро по п 1, о гл {чающееся тем, что коммутатор информационных каналов сол.ер-жит дешифраторы операторов ввода и вывода информации к селектсры-мультк- алечсоры инфорнационных каийлов и кана- л;;з вывода, при этом вход дешифратора оператора ввода соединен с выуллоы микро- ЭВМ, а выход - с сел-ектором-му.тьтиплек- сором информационных каналов, выход ко- тс-рого связан с входом микроЭВхМ, вход дешифратора оператора вывода связан с микро.ЭВМ, а выход - с се;1ектором-культиплексором каналов выхода, который другими входами связан с микроЭВЛА, а выходами - с многоканальным усилителем.
3. Устройство 110 п. 1, отличающееся тем, что многоканальный усилитель вынолнен с триггерами на входе.



| название | год | авторы | номер документа |
|---|---|---|---|
| Угломерная радионавигационная система автовождения машинно-тракторного агрегата | 1988 |
|
SU1630625A1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Устройство для автовождения колесных машинно-тракторных агрегатов | 1984 |
|
SU1235458A1 |
| Система автоматизированного вождения машинно-тракторных агрегатов | 1982 |
|
SU1060130A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Устройство для поворота трак-ТОРНыХ АгРЕгАТОВ | 1979 |
|
SU808024A1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| Устройство для управления движением трактора | 1980 |
|
SU873908A1 |


Изобретение относится к механизации сельского хозяйства. Цель изобретения - повышение качества автовождения на рабочем гоне и поворотной полосе. В режиме освобождения на рабочем гоне устройство реализует алгоритм, заложенный в память микроэвм. В процессе автовождения микро- ЭВМ 21 посредством коммутатора 9 информационных каналов опрашивает датчики 1, 12 частоты враш,ения ведуших и направляющих колес через преобразователи 10, 11 частоты в код, датчики 2, 18 бокового и продольN2 Ni ного крена, 3 - положения направляющих колес трактора, 5 - траекторной ошибки, 19 - массы рабочей машины, 20 - силы тяги через аналого-цифровые преобразователи 13, 14, 15, 16 и 17 соответственно. Выходные сигналы микроэвм через многоканальный усилитель 6 подаются на входы исполнительных механизмов 8 рулевого управления, 24, 25 - регулирования продольного и поперечного выноса точки копирования траектории и на звуковой сигнал 7. Для управления на поворотной полосе в память микроэвм 21 при первом развороте закладывается универсальный алгоритм, для чего коммутатор 9 по запросу микроЭВМ 21 опрашивает датчики частоты вращени.я ведущих 1 и направляющих 12 колес, бокового 2 и продольного 18 крена, положение 3 направляющих колес, массы 19 рабочей машины, силы 20 тяги на крюке. После завершения оператором разворота по команде с терминала 22 эта информация заносится по соответствующим адресам и в последующем используется для реализации разворота в автоматическом режиме. 2 з. п. ф-лы, 6 ил. Sfi (Л сд со
Фи,.2
2/J
6 (
аг.Ъ
К г1инро-ЭВМ 21
J
О5
6
1
Фи. .5
l5
О
Фаг 5
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
