I
Изобретение относится к средствам автоматики непрерывного транспорта, в частности к способу контроля пробуксовки ленты.
Известны способы контроля пробуксовки ленты при запуске конвейеров, основанные на сравнении измеряемой величины с эталонной.
Цель изобретения - непрерывный контроль пробуксовки ленты относительно приводного барабана.
Для этого участок наружной поверхности ведущего приводного барабана, выраженный эталонным числом импульсов, сравнивается с равным по длине участком ленты, выраженным соответствующим текущим числом импульсов.
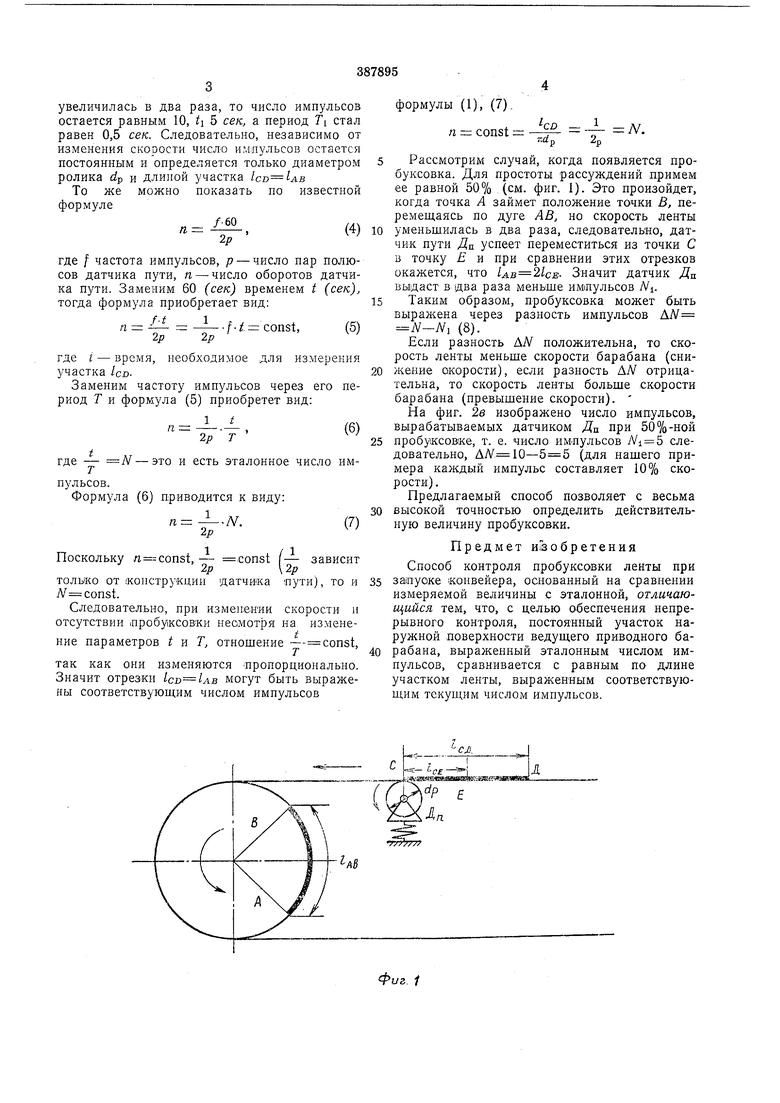
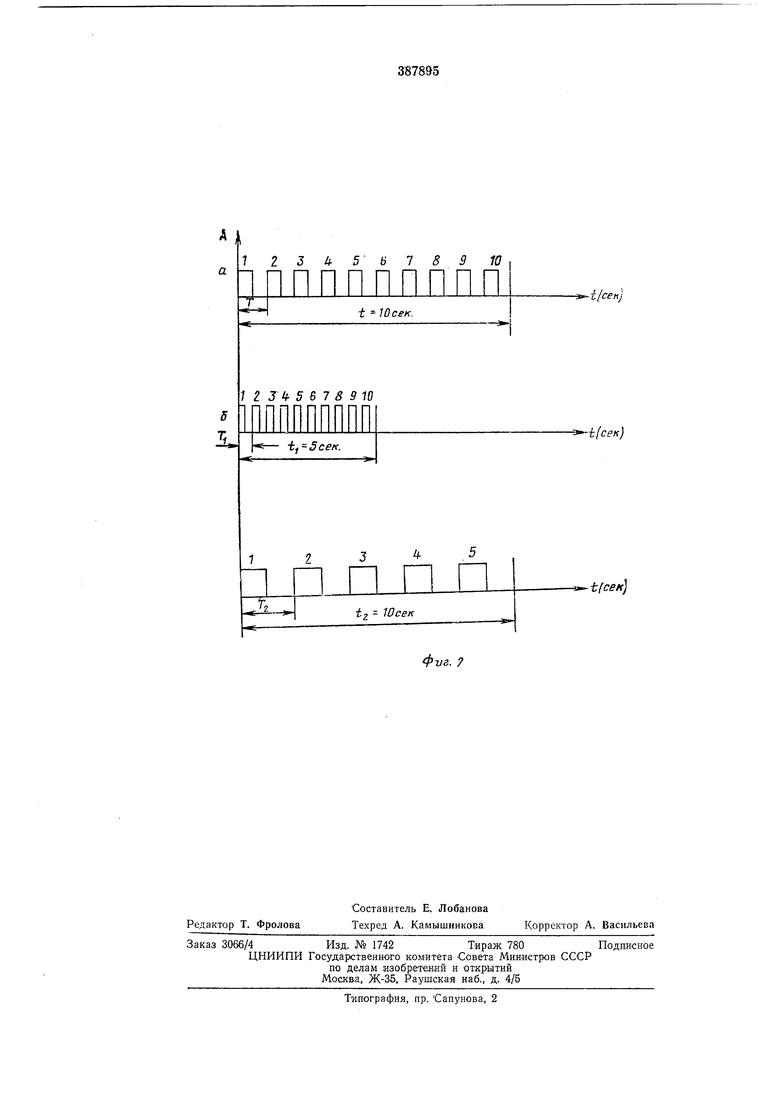
На фиг. 1 изображена схема, поясняющая предлагаемый способ; на фиг. 2 - схема импульсов.
На приводном барабане берется участок наружной поверхности его IAB, а на ленте - участок длины ленты /CD. Длина участка IAB принимается за эталон, а длина участка ленты /CD является измеряемой (переменной) величиной. Эталонное число оборотов получается при фрикционном обкатывании роликом датчика пути Да участка ленты ICD, равного длине участка IAB, и определяется из формулы:
,(1)
где dp - диаметр ролика датчика пути.
Соответственно измеряемое при пробуксовке равно
I.
CE
где ICE равно участку длины ленты, по которому успевает обкатиться ролик датчика пути, когда точка А займет положение точки В дуги АВ на барабане. Если вычесть из формулы (1) формулу (2), то получим пробуксовку ленты, выраженную в оборотах
(/с.д-и,(3)
П
ndr,
Из формул (1), (2) следует, что число оборотов ролика датчика пути Д, который перемещается по участку длины ленты /CD или /СЕ. определяется только конструктивными размерами диаметра ролика d и длиной сравниваемых отрезков и не зависит от абсолютной скорости конвейера. При отсутствии 1Прабуксов1ки числа имдульсов, вырабатываемых датчиком пути Дш не зависит также от скорости движения, ибо при обкатывании ролика по отрезку СД датчик всегда сделает одно и то же число оборотов. На фиг. 2а изображены имлульсы, вырабатываемые датчиком 1пути Дп ори измерении участка ленты /CD без пробуксовки, например, за 10 сек получается 10 импульсов, т. е. длительность имлульса Т 1 сек. Если участок ICD измерить за 5 сек. (фиг. 2 б), т. е. скорость движения увеличилась в два раза, то число импульсов остается равным 10, ti 5 сек, а период TI стал равен 0,5 сек. Следовательно, независимо от изменения скорости число иг.шульсов остается постоянным и определяется только диаметром ролика dp и длиной участка То же можно показать по известной формуле / частота импульсов, р - число пар полюсов датчика пути, п- число оборотов датчика пути. Заменим 60 (сек) временем t (сек), тогда формула приобретает вид: п ---f-t. consi,(5) 2р2р где t - время, необходимое для измерения участка /сд. Заменим частоту импульсов через его период Т и формула (5) приобретет вид: где - N - это и есть эталонное число имТпульсов. Формула (6) приводится к виду: Поскольку n :const, - const I- зависит только от конструкции датчи1ка пути), то и Л/ const. Следовательно, при изменении скорости и отсутствии пробуксовки несмотря на изменение параметров t и Т, отношение - const, так как они изменяются пропорционально. Значит отрезки могут быть выражены соответствующим числом импульсов формулы (1), (7), -- -- ДГ п - const : Рассмотрим случай, когда появляется пробуксовка. Для простоты рассуждений примем ее равной 50% (см. фиг. 1). Это произойдет, когда точка Л займет положение точки В, перемещаясь по дуге АВ, но скорость ленты уменьшилась в два раза, следовательно, датчик пути Дп успеет переместиться из точки С в точку Е и при сравнении этих отрезков окажется, что Значит датчик Дп выдаст в два раза меньше имлульсов Л. Таким образом, пробуксовка может быть выражена через разность импульсов ДЛ/ N-NI (8). Если разность ДЛ положительна, то скорость ленты меньше скорости барабана (снижение скорости), если разность AN отрицательна, то скорость ленты больше скорости барабана (превышение скорости). На фиг. 2б изображено число импульсов, вырабатываемых датчиком Дп при 50%-ной пробуксовке, т. е. число импульсов Ni - b следовательно, (для нашего примера каждый импульс составляет 10% скорости). Предлагаемый способ позволяет с весьма высокой точностью определить действительную величину пробуксовки. Предмет и1зобретения Способ контроля пробуксовки ленты при запуске конвейера, основанный на сравнении измеряемой величины с эталонной, отличающийся тем, что, с целью обеспечения непрерывного контроля, постоянный участок наружной поверхности ведущего приводного барабана, выраженный эталонным числом импульсов, сравнивается с равным по длине участком ленты, выраженным соответствующим текущим числом импульсов.
1 2Л456755 10
ппппппппп
-Цсек
t IDcfK.
фуг.
