1
В основном авт. св. № 354087 приведено описание устройства для контроля наполнения ковша сыпучим материалом, преимущественно установки горизонтального бурения, снабженного датчиком усилия -перемещения материала по ковшу и датчиком отклонения ковша от вертикали, причем датчик усилия соединен через усилитель с релейным блоком сравнения, к которому, в свою очередь, подключен задатчик и интегратор, связанный с датчиком отклонения через функциональный блок.
Цель изобретения - повышение точности.
Для этого к интегратору через умножитель, соединенный с функциональным блоком, подключен датчик скорости.
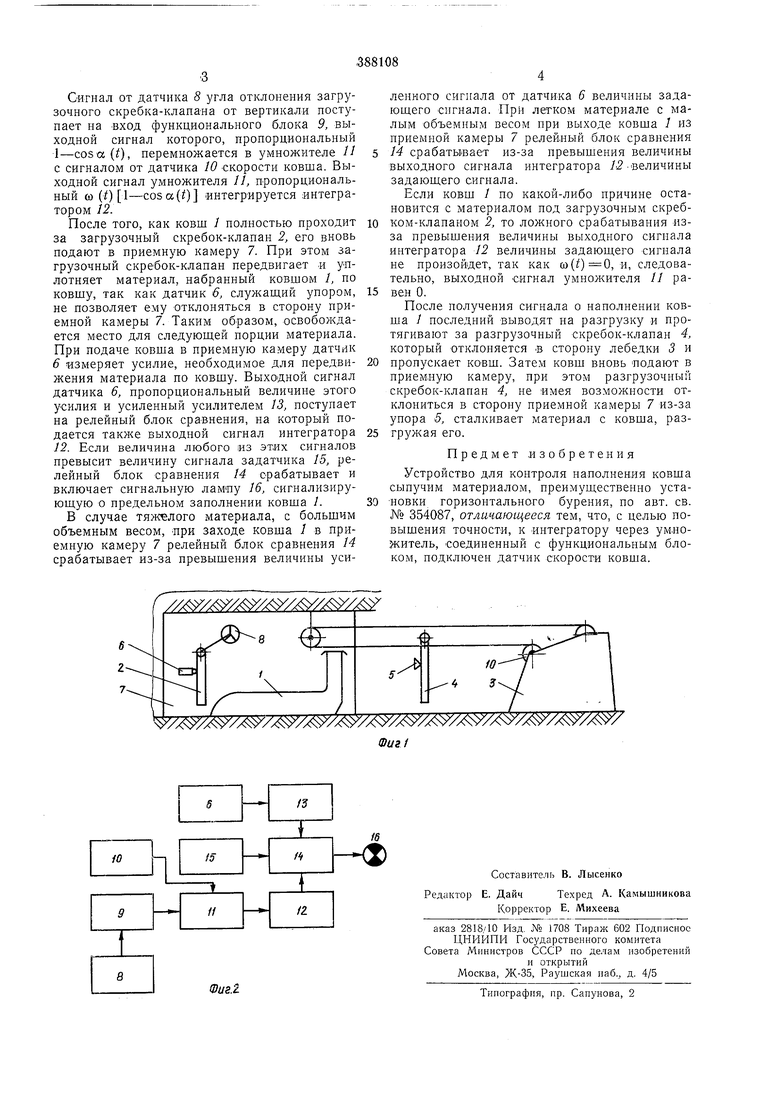
На фиг. 1 изображена установка горизонтального бурения с датчиками; на фиг. 2 - блок-схема устройства.
Устройство состоит из ковша 7 загрузочного скребка-ковша 2, лебедки 3 и разгрузочного скребка-клапана 4 с упором 5.
Упором для загрузочного скребка-клапана 2 служит датчик 6 усилия перемещения материала по ковшу /.
Кроме того, в устройстве имеется также приемная камера 7, датчик 8 отклонения, функциональный блок 9, датчик 10 скорости ковша 1, умножитель 11, интегратор 12, усилитель 13, релейный блок сравнения 14, задатчик 15 и сигнальная лампа 16.
Сыпучий материал поступает в приемную камеру 7. Ковш подают в приемную камеру 5 лебедкой 3, при этом ковш набирает первую порцию грунта. Затем его выводят из приемной камеры, при этом загрузочный скребокклапан 2 отклоняется от вертикального положения, пропуская ковш / и копируя контур 0 порции материала, набранного ковшом. Высота слоя материала под загрузочным скребкомклапаном 2 определяется выражением:
h(f)l -COSa(),
где h(t) - высота слоя материала;
/ - длина загрузочного скребка-клапана;a(t)-угол отклонения загрузочного
скребка-клапана от вертикали; t - время.
Объем материала набранного ковшом быть выражен следующей зависимостью:
V K (f)ll - cos7.(О JafA о
5 где V - объем материала, набранного ковщом
за время t; (i)(t) - скорость движения ковша;
К- коэффициент пропорциональности, учитывающий физико-механические свойства грунта.
Сигнал от датчика S угла отклонения загрузочного скребка-клапана от вертикали поступает на вход функционального блока 9, выходной сигнал которого, пронорциональный 1-cos а (t), перемножается в умножителе И с сигналом от датчика 10 -скорости ковша. Выходной сигнал умножителя 11, пропорциональный (О (t) 1-cosa() интегрируется интегратором 12.
После того, как ковш / полцостью проходит за загрузочный скребок-клапан 2, его вновь подают в приемную камеру 7. При этом загрузочный скребок-клапан передвигает и уплотняет материал, набранный ковшом /, по ковшу, так как датчик 6, служащий упором, не позволяет ему отклоняться в сторону приемной камеры 7. Таким образом, освобождается место для следующей порции материала. При подаче ковша в приемную камеру датчйк 6 измеряет усилие, необходимое для передвижения материала по ковшу. Выходной сигнал датчика 6, пропорциональный величине этого усилия и усиленный усилителем 13, поступает на релейный блок сравнения, на который подается также выходной сигнал интегратора 12. Если величина любого из этих сигналов превысит величину сигнала задатчика 15, релейный блок сравнения 14 срабатывает и включает сигнальную лампу 16, сигнализирующую о предельном заполнении ковша 1.
В случае тяжелого материала, с большим объемным весом, лри заходе ковша / в приемную камеру 7 релейный блок сравнения 14 срабатывает из-за превышения величины уси//./../.
W/..
ленного сигнала от датчика 6 величины задающего сигнала. При легком материале с малым объемным весом при выходе ковша / из приемной камеры 7 релей.ный блок сравнения 14 срабатывает из-за превышения величины выходного сигнала интегратора /2-величины задающего сигнала.
Если ковш / по какой-либо причине остановится с материалом под загрузочным скребком-клапаном 2, то ложного срабатывания изза превышения величины выходного сигнала интегратора 12 величины задающего сигнала не произойдет, так как й)()0, и, следовательно, выходной сигнал умножителя // равен 0.
После получения сигнала о наполнении ковша 1 последний выводят на разгрузку и протягивают за разгрузочный скребок-клапан 4, который отклоняется в сторону лебедки 3 и
пропускает ковш. Затем ковш вновь подают в приемную камеру, при этом разгрузочный скребок-клапан 4, не имея возможности отклониться в сторону приемной камеры 7 из-за упора 5, сталкивает материал с ковша, разгружая его.
Предмет изобретения
Устройство для контроля налолнения ковша сыпучим материалом, преимущественно установки горизонтального бурения, по авт. св. № 354087, отличающееся тем, что, с целью повышения точности, к интегратору через умножитель, -соединенный с функциональным блоком, подключен датчик скорости ковша.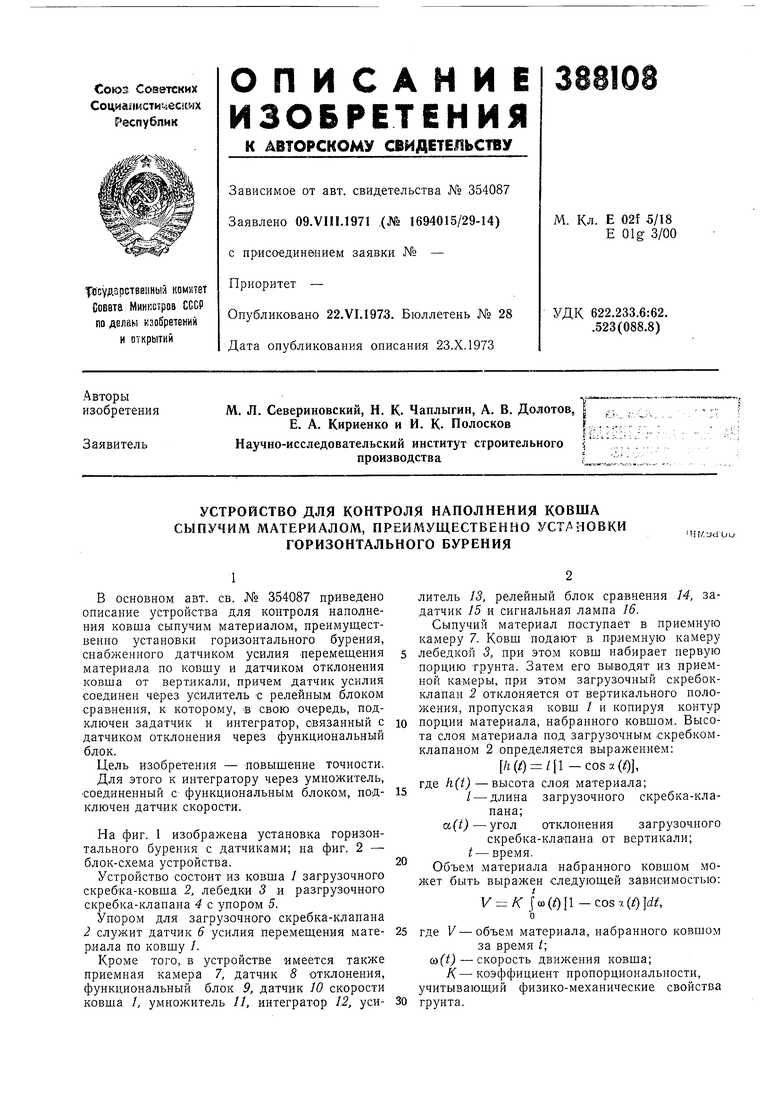
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для КОНТРОЛЯ НАПОЛНЕНИЯ КОВША СЫПУЧИМ МАТЕРИАЛОМ | 1972 |
|
SU354087A1 |
| Устройство для контроля наполнения ковша сыпучим материалом | 1978 |
|
SU724653A2 |
| Система стабилизации бурового судна | 1986 |
|
SU1360405A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2006 |
|
RU2332542C1 |
| Способ дозирования компонентов агломерационной шихты | 1984 |
|
SU1206625A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ЭКСКАВАТОРА-ДРА ГЛАЙ НА | 1970 |
|
SU281600A1 |
| Устройство для охлаждения сыпучей смеси | 1981 |
|
SU1016041A1 |
| Установка для бестраншейной прокладки труб | 1959 |
|
SU130060A1 |
| Устройство для управления рабочим оборудованием экскаватора-драглайна | 1985 |
|
SU1313962A2 |
| Весовой порционный дозатор | 1980 |
|
SU879316A1 |
