П
1.1оПретг: 1ие отпосглтся к судовой .Т(, м,)тике н может быть использовано для аьгом Чтическш о удержания буро- Tioro судна в точке проледеиня работ по пол,род.иому буреии и.
Целью изобр(тения является новы-- иепие точности системы стабилизации за счет уменьшения времени несоответствии вырабатываемых парирующих усили -изменяющимся внешним воядей- стииям.
На фиг. 1 представлена блок-схема системы стабилизации;на фиг. 2 - пример реализацией следящего устрой- стна;на фиг. 3 - неподвижная и связанная с судном система коо рдинат
Система (см, фиг. 1) содержит три контура курсовой,продольной и поперечной стабиди. задии, каждый из кото- рых состоит иг третьего сумматора 1 (2,3), четвертого и первого интеграторов 4,5 (6,7; 8,9), первого сумматора JO (1, 12)5второ.го и третьего интеграторов 13, 14 (15, 16; 17,18) и второго сумматора 19 (20,21).Система имеет вращающийся трансформатор (ВТ) - датчик 22 курса, и ВТ- прием т:к 23 курса, связаннЕЛ синхронггой связью с ВТ-датпиком 22, а также последовательно соединенные фазочув- ствительный усилитель. 24, ключ 25, усил1ггель мощности 26 и электродвигатель 27, механически подсоединенньш к ВТ-приемнику 23 курса. Синусная обмотка ВТ-приемпика 23 курса связана с фазочунстсительным усилителем 24, а косинусная обмотка с фа- зочувствителыгым усилителем 28,подключенным к восьмому сумматору 29, к второму входу которого подсоединен источник опорного напряжения (не показан) .,
В составе систе -1ы имеется задат- чик 30 курса, под5слгоченное к нему первое следящее устройство 31, связанное с четвертым сум1 1атором 32 непосредственно к с. вторым сумматором 19 через третий ключ 33„
Система содержит следящие устройства - шестое 34, второе 35, четвертое 36; второй блок 37 переключения первый блок 38 переключени триггеры 39, второй нуль-орган 41, первый нуль-орган 42, кнопку ввода A3, второй ключ 44, последовательно включенные второй инвертор 45, Первый умножш ель 46, пятый сумматор 47, шестой cyrwaTop 48 и тре
5 0
5
g
5
0
0
т1-,е гледлс1ее устройство 49, третий умножитель 50, последовательно включенные второй умножитель 51, шестой и седьмой сумматоры 52, 53 и пятое следящее устройство 54, четвертый умножитель 55, nepBbtfi инвертор 56, датчик 57 рассогласования продольной координаты и датчик 58 рассогласования поперечной координаты.
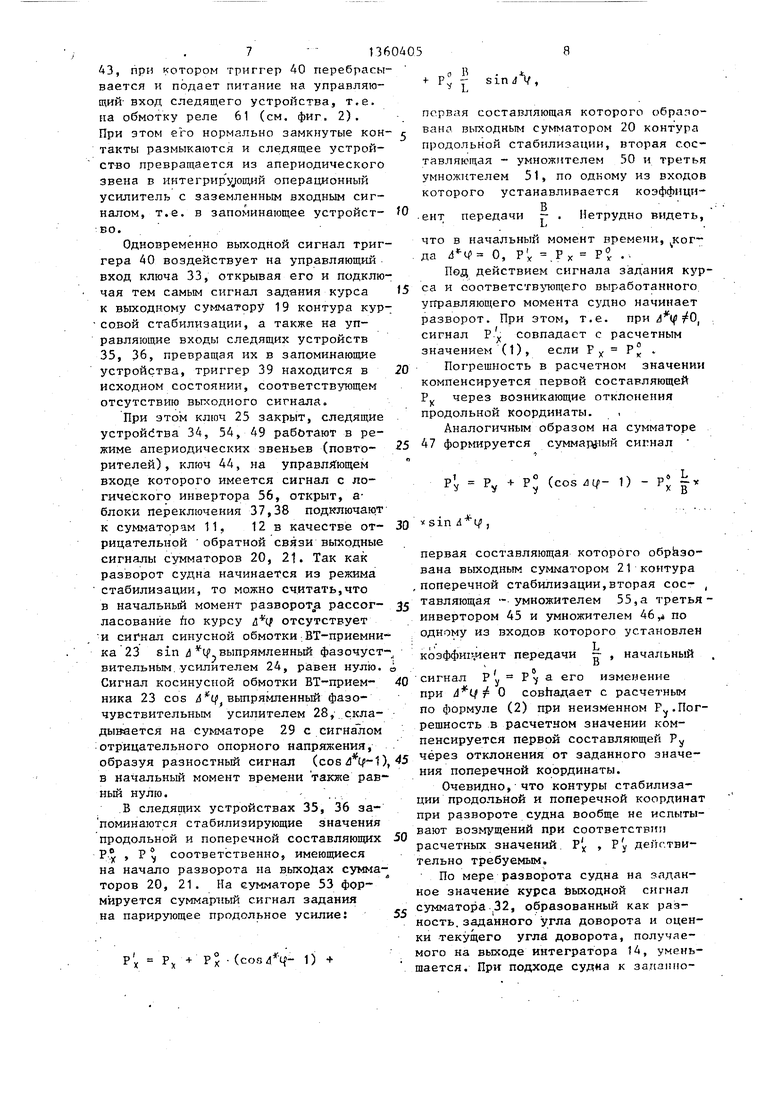
Сумматоры, интеграторы, инверторы нуль-органы, ключи, фазочувствитель- ные усилители, усилитель мощности, умножители и триггеры реализуются на известных элементах микроэлектроники путем их типо.вого включения . Блоки переключения 37, 38 могут представлять собой обьмные неполяризованные реле. Следящее устройство (см. фиг. 21 может быть выполнено на основе стан- дар тного операционного усилителя 59, в обрат} ую связь которого включен интегрирующий конденсатор 60 и параллельно ему через нормально замкнутый контакт 61 реле 61 резистор 62.
Входной сигнал подается через второй нормально замкнутый контакт реле 612 и резистор 63,
Датчики .57, 58 рассогласований продольной и поперечной координат могут быть построены на ра-зличных физических принципах.
В этом качестве, например, могут быть использован стандартные. инер- и альные системы, В качестве датчика курса 22 может быть применен судовой гирокомпас.
Задатчик курса 30 может быть выполнен в виде потенциометра, движок которого связан с рукояткой.
Система работает следующим образом.
Сигнал рассо ласования курса Л V, получаемый на синусной обмотке ВТ- приемника 23 курса и выпрямленный фазочувствительным усилителем 24, через открытый ключ 44 поступает на входной сумматор 1 контура стабилизации курса 5 преобразуясь в этом контуре в сигнал задания парирующего момента Рц .Сигналы рассогласования продольной /)х и поперечной /3 у координат, вырабатываемые соответствующими датчикаьш 57, 58,преобразуютг- ся в контурах стабилизации продольной и поперечной координат в сигналы задания па-рирующих продольного Р и поперечного Р , усилий, по.пучае, на сумматорах 19 20, 21. ПресПразова31
ние сигналов рассогласования ji, i (/, X, у производится по следующему закону:
Р, - К,. - h,./i - ,
где с/, Л оценки величины рассогласования и его первой производной, получаемые на выходе интеграторов 14 (16; 18) и 13 (15, 17) соответственно;у - оценка внешнего воздействия на судно, получаемая на выходе интегратора 5 (7; 9);
Ki,h,.,i
коэффициенты закона
стабилизации,выбирае
мые из условия устои- чивости регулируемого процесса.
Оценки о/ 5 /1S J находятся из 25 системы дис ференциальных уравнений, реализованных контурами стабилизации
1
fti + ;р ( d ; - о/) ;
tt
/а С,. (Р-. + J ) + 1- (. -of).;
i-
1 т
( &. );
Ь L
т,
де
(Л.; - 0( )j
оценка скорости измене- 40 ния внеганего воздействия, получаемая на интеграторе 4 (6; 8) I
To/.T/i.
ТЛ,,ТР - постоянные времени интег- 45 т раторов 14 (16; 18),
13 (15; 17), 3(7; 9) и 4 (6; 8) соответственно, выбираемые из условий сходимости оценок к ис- 50 тиннь М значениям и фильтрации, волновых форм в сигналах рассогласования
Р. - коэффициент,определяю- 55
щий эффективность стаби.-. лизирующих усилий по со- ответствуюп им координатам.
1
5
П
5
0
5
0
5
0
5
Сходимость оценок обеспгчипаеггп за счет формирования на нходиом сумматоре 1 (2, 3) каждого контура ста- билияацяи разности мгжду истинной величиной пассогласопании и ее оценкой ( Л - (У ) и использованием этой разности как отрицательной обратной связи во всех диф41еренциаль- ных уравнениях.
Заданное значение парирующего мо-. мента Р f через следящее устройство 34, работающее как апериодическое звено, в .котором его выходной сигнал следит .за входным сигналом, в качестве сигнала отрицательной обратной связи поступает в сумматор 10.
Заданное значение парируемого усилия Р, (Р,) через блок переключения 37 (38) в качестве сигнала отрица-i тельной обратной связи поступает в су1Ф1аторе 11(12).
Режим динамической стабилизаххии характеризуется поддержанием вблизи нуля как величин рассогласований Ai, i Ч, X, у, так суммарных входных сигналов интеграторов 4 (6,8), 5 (7,9), 13 (15, 17) и 14 (16, 18) в контурах стабилиза1: ии,что , означает выполнение равенств
О, Р -7
т.е. заданная величина парируюя1его усилия равна по величине и противоположна по знаку внешнему воздействию.
Эти равенства устанавливаются в результате переходного процесса по стаб1шизируемой координате,в течение которого интегратор 5 (7-, 9) переписывает на свой выход величину внешнего возм тцажщего воздействия. Скорость и время этой записи зависят от принятой модели внешнего возмуще- . ния, а точнее от степени соответствия этой модели реальной картине внешнего возь{ущения. В предположении, что внешнее возмзпцение судна неизменно по величине, то в течение длительного времени (например, постоянные ветровая нагрузка и течение) наилучшей моделью является уравнение первого порядка .i О с решением l А ,, где А - постоянная,эпияоди- чески корректир- укш- ая свое значение (коррек ция производится с помотью сигнала отрицательной обратной зи(Д;-с;).
51360
Однако при развороте судна над точкой бурения внеган.ее силовое воздействие на судно существенно и быстро меняется. Для лучшего приближе- ния к нему;в предлагаемой системе используется дифференциальная модел-ь лозмущения второго порядка
3- 0
с решением j A + Bt, где A,В - постоянные,также эпизодически корректирующие свои значения (с помощью сигнала ( j с/) .
Очевидно, что решение указанной модели г для случая быстроменяющегося внешнего воздействия требует более резкой корректировки значений Аи В, нежели решение дифференциальной мо- дели первого порядка, уменьшая тем .самым суммарное время обусловленйого корректировкой переходного процесса, а значит и время несоответствия, парирующего усилия внешйему воздействию. Это,в свою очередь, уменьшает величину отклонения судна от точки стаби при изменении внешнего воздействия.
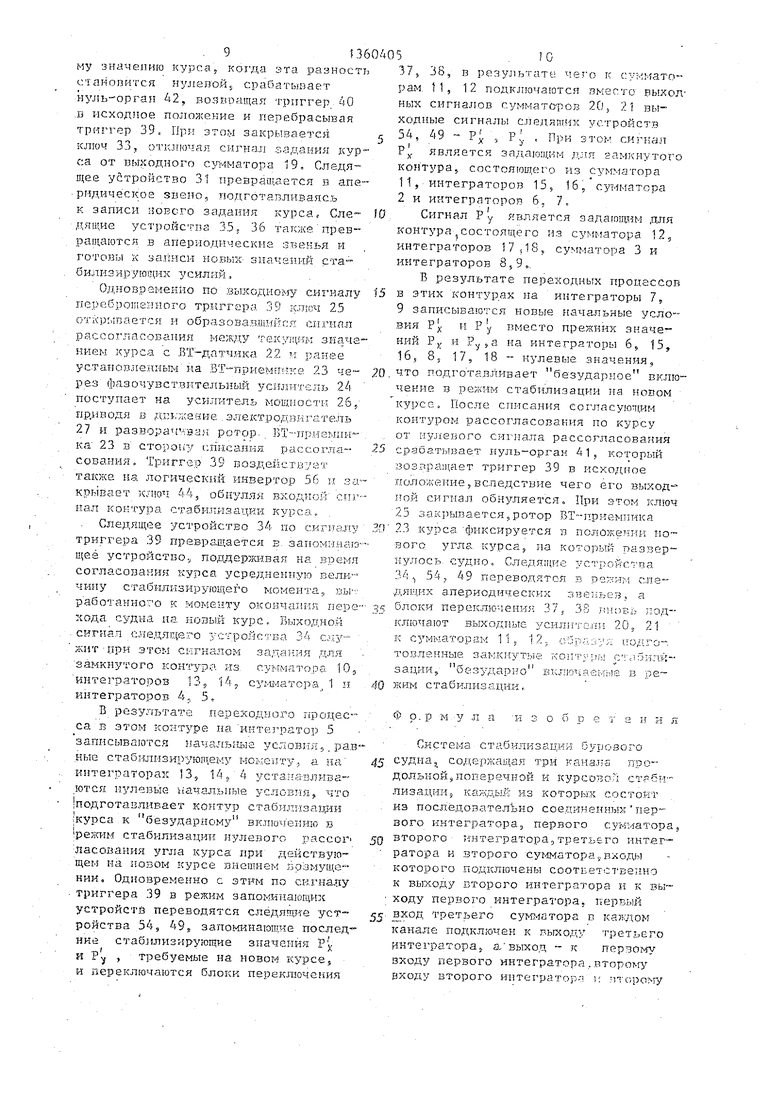
Получаем аналитическое описание этого изменения, вызванного разворотом судна на новый курс, в предположении, что вектор внешнего силового давления р на судно от ветра и течения сохраняется на время разворо, та неизменным. Тогда продольная y-j,- и поперечная у составляющие внешне го воздействия по отношению к судну могут быть выражены формулами t
у р В sin If
р L cos cp,
где В и L - эффективные площади воздействия вектора р в соответствующих направ- лениях, пропорциональные в первом приближени ширине и длине бурового судна.
Здесь условно принято,что вектор р направлен вдоль неподвкл ной оси Y.(CM, фиг. 3), а°отсчет угла курса производится от неподвижной оси X. При развороте иа новое значение курса ( V ) изменившиеся состав ляющие внешнего воздействия по отношению к судну . -yV и .j могут быть выражены через прежние значения у„
и f по формулам:
r
sin (tf + ) р
xcos 4 t/-i- рВ cos I/
В sin Ч j ,cos )+
T
V L
sin
y y pL cos ( Ц + ) p I-
. X, .-r , - iLJO
xcos д(/- p L sin (f sin
yv
cos ,
sin .
Соответственным образом новые установившиеся значения парирующих усилий равны
Русоз +
1
)
5
0
,
5
0
р ,, РуСОБ Р - sin J(,(2)
что требует значений лишь прежних
стабилизирующих усилий Ру и PV и
угла доворота курса А if , Это обстоятельство непосредственно используется в предложенной системе, вырабатывающей при развороте судна новые установившиеся значения парируюпсик усилий не за счет отклонения стабилизируемой координаты от заданного значения, как в прототипе,а путем вьfчиcлeния их по приведенным формулам. Благодаря этому в контурах стабилизации возникают переходные процессы, обусловленные лишь несоответствием вычисленных значений парирующих усилий действительно требуемым, которое,очевидно существенно меньше того-несоответствия,которое возникло бы,в отсутствие пересчета установившихся значений.
Именно это. уменьшение степени несоответствия выработанных в конту- pax стабилизации величин парирующих усилий имеющимся внешним воздействиям и соответственное уменьшение . переходных процессов является фиаи-- ческой основой повышения точности . предложенной системы.
Функционально разворот судна на новьш курс с использованием указанного пересчета выглядит следующим образом. Оператор отклоняет рукоятку заДатчика курса 30 на угол желаемого доворота. Сигнал задания, пропорциональный этому углу, повторяется СледЯЕЩм устройством 31 и запоминается на нем после нажатия кнопки
7 - 3f)0ft05 43, при котором триггер 40 перебрасывается и подает питание на управляющий- вход следящего устройства, т.е. па обмотку реле 61 (см. фиг, 2). При этом его нормально замкнутые кон- такты размыкаются и следящее устройство превращается из апериодического звена в интегрир ууощий операционный усилитель с заземленным входным сигналом, т.е. в запоминающее устройст- О во.
Одновременно выходной сигнал триггера 40 воздействует на управляющий вход ключа 33, открывая его и подключая тем самым сигнал задания курса 15 к выходному сумматору 19 контура кур совой стабилизации, а также на управляющие входы следящих устройств 35, 36, превращая их в запоминающие устройства, триггер 39 находится в исходном состоянии, соответствующем отсутствию вьп одного сигнала.
При этом ключ 25 закрыт, следящие устройства 34, 54, 49 работают в режиме апериодических звеньев (повторителей) , ключ 44, на управлягющем входе которого имеется сигнал с логического инвертора 56, открыт, а- блоки переключения 37,38 подключают к сумматорам 11, 12 в качестве отрицательной обратной связи выходные сигналы сумматоров 20, 21. Так как разворот судна начинается из режима
стабилизации, то можно считать,что в начальный момент разворота рассогласование fio курсу отсутствует и сигнал синусной обмотки ВТ-приемни- ка 23 sin /1 if выпрямленный фазочуст- витальным.усилителем 24, равен нулю, о Сигнал косинусной обмотки ВТ-прием- 40 ника 23 cos ti вьшрямленный фазо- чувствительным усилителем 28,-.скла- дывается на сумматоре 29 с сигнаЪом
:отрицательного опорного напряжения.
20
25
30
35
Р L
sin
А,
первая составляющая которого образо вана выходным сумматором 20 контура продольной стабилизации, вторая сос тавляющая - умножителем 50 и треть умножителем 51, по одному из входо которого устанавливается коэффици В
ент
передачи гИетрудно видеть
что в начальный момент времени, когда О, Р ,Р Р .,
Под действием сигнала задания кур са и ооответствутощего выработанного угтравляющего момента судно начинает разворот. При этом, т.е. при (( 0 сигнал Р , совпадает с расчетным значением (1), если РХ Р° .
Погрешность в расчетном значении компенсируется первой составляющей Pj через возникающие отклонения продольной координаты.
Аналогичным образом на сумматоре 47 формируется суммащ1ый сигнал
PV Р.
sin .
Р° (cos 1) D L В
первая составляющая которого o6pti3O- вана выходным сумматором 21 контура поперечной стабилизации,вторая сое- тавляющая - умножителем 55,а третья инвертором 45 и умножителем 46 по одному из входов которого установлен
коэффш иент передачи - ,
1Ь
начальный
сигнал
при о
Р vf а его изменение совЬадает с расче7 ным
по формуле (2) при неизменном Р.Пог
решность в расчетном значении компенсируется первой составляющей Ру
образуя разностный сигнал (cosdVl), через отклонения от заданного значе- в начальный момент времени также рав- поперечной координаты, ный нулюОчевидно, что контуры стабилизаВ следящих устройствах 35, 36 запоминаются стабилизирующие значения продольной и поперечной составляющих 50
ции продольной и поперечной координат при развороте судна вообще не испытывают возмущений при соответствии
P v
демствирасчетных значений. Р, тельно требуемым.
соответственно, имеющиеся
рс
на начало разворота на вьгходах сумматоров 20, 21. На сумматоре 53 формируется суммар1 мй сигнал задания на парирующее продольное усилие:
Р + РХ (cos 1)
Р L
sin
А,
О
5
0
5
первая составляющая которого образована выходным сумматором 20 контура продольной стабилизации, вторая составляющая - умножителем 50 и третья умножителем 51, по одному из входов которого устанавливается коэффици- В
ент
передачи гИетрудно видеть,
что в начальный момент времени, когда О, Р ,Р Р .,
Под действием сигнала задания курса и ооответствутощего выработанного угтравляющего момента судно начинает разворот. При этом, т.е. при (( 0 сигнал Р , совпадает с расчетным значением (1), если РХ Р° .
Погрешность в расчетном значении компенсируется первой составляющей Pj через возникающие отклонения продольной координаты.
Аналогичным образом на сумматоре 47 формируется суммащ1ый сигнал
PV Р.
Р° (cos 1) D L В
30
sin .
первая составляющая которого o6pti3O- вана выходным сумматором 21 контура поперечной стабилизации,вторая сое- , тавляющая - умножителем 55,а третья- инвертором 45 и умножителем 46 по одному из входов которого установлен
коэффш иент передачи - ,
1Ь
начальный
сигнал
при о
Р vf а его изменение совЬадает с расче7 ным
по формуле (2) при неизменном Р.Погчерез отклонения от заданного значе- поперечной координаты, Очевидно, что контуры стабилизации продольной и поперечной координат при развороте судна вообще не испытывают возмущений при соответствии
P v
демствирасчетных значений. Р, тельно требуемым.
По мере разворота судна на заданное значение курса йыходной сигнал сумматора 32, образованный как разность, заданного угла доворота и оценки текущего угла доворота, получаемого на выходе интегратора 14, уменьшается. При подходе судна к задапному значению курса, ког да эта разность о. ч а i-i о п и т с я нуле пой,. ера б а т ьиз а е т нуль-орган А2, возвващал триггер 40 .в исходное положение и перебрась }зая триггер 39. При этом закрывается ключ 33, отключая сигнал задания кур са от выходного сзгмнатора 19. Следящее уйтройство 31 npeBpaaiasTCH в апе- ридическое звено, подготаг л лваяс.ь к записи новсго задания курса.- Сле д, устройс гпз 35 36 также прев- рггщаются в апериодическиа звенья и готовы к записи но.вы1С зиапений ста- билиэирую дик усилий.
Одновременно по :выходному сигналу переброшенного Tpitrrapa 39 25 открг.гпаетсп и образовавшийся сигнал рассогласования между текууця - зНсаче- нием курса с 15Т датчик:а 22 и ранее установленном на ВТ-прием-гике 23 через фазочувствительный уси гятель 24 постунает на усршитель soщнocтк 26 ,- пр.иводя в д.п. лсеаие .электродзкгятель 27 н разворач лван ротор- БТ-приемни - ка 23 в стороиу спнсаикя рассогласования. Триггер 39 воздействует также на логический инвертор 56 и за- кпывает JQIIOH 44,
37, 38, в р€ 33/льтате чего к сумматорам, 11, 12 нодк:ночагатся вместо выходных сигналов сумматс-ров 20, 21 выходные сигналь след,нг11Их устройств
54. 49 - Pt
iПри сигнал
0
F. является задающим для вамкнутого контура, состоягощем о из сумматора 11, интеграторогз 15, 16, су М - атора 2 и интеграторов 6. 7.
Сигнал Ру является задающ-нн ,аля
1 9
I 5
J5
контура состоящего из суьтматора интеграторов 17,18, суьгматора 3 интеграторов 8,9,,
В результате переходных процассов в этих контурах на интеграторы 7, 9 занисываются новые начальные условия РХ и Ру вместо нрежних значений PV и Р,5а на интеграторы 6, 15, 16, 8; 17, 18 - нулевые значения,
20. что подготавливает безударное включение в режим стабилизации на новом курсе. После снисания сот ласующим конт5 ром рассогласования но курсу О1 нул евого сиг-нала рассогласования
25 срабатывает нуль-орган 41, который зозпращает триггер 39 в исходное поло-А еиие 3 вспедстврге чего его выход- 1то,й сигнал обнуляется. При этом 25 закрывается,ротор ВТ-т-гриемпика Следящее устройство 34 по с,игналу 3-0 23 курса фиксируется п положен ии но37, 38, в р€ 33/льтате чего к сумматорам, 11, 12 нодк:ночагатся вместо выходных сигналов сумматс-ров 20, 21 выходные сигналь след,нг11Их устройств
54. 49 - Pt
iПри сигнал
F. является задающим для вамкнутого контура, состоягощем о из сумматора 11, интеграторогз 15, 16, су М - атора 2 и интеграторов 6. 7.
Сигнал Ру является задающ-нн ,аля
1 9
I 5
контура состоящего из суьтматора интеграторов 17,18, суьгматора 3 интеграторов 8,9,,
В результате переходных процассов в этих контурах на интеграторы 7, 9 занисываются новые начальные услотриггера 39 превращается в, заноминага
щеё устройство, поддер к1,вая на время согласования курса усредненную вели- чину с-табклизир-ующег о момента., вьг работанного к мo 5eнтy окончагп-н пере хода судна на иозый курс. Вь ходно,й , сигнал (ладящего устройства 34 с;му- жит-цри этом сигналом задания для замкнутого контура из суг-гматора, 10, ннтегратороз 13, 14„ су;-шатора 1 и интеграторов 4,, 5,
В результате ,нерелодно.го i:(pon,ec--- са в это,м контуре на интез ратор 5 запнсывагатся начальгаза условия 5. равные стабилизируюптему ыокетггу. а на интеграторах 13, 14 4 з стапа-влива- ются -иа-ч:аль ГпШ условия что подготавливает контур стабилиза,ид1и ;курса к безударному включению Б реш-1м стабилизации Н улевого рассог ласования угла курса при действую- .i на новом курсе внешнем зозмуще- НИИ, Одновременно с зтим по сигналу - триггера 39 в режигч зaпoминaloщ пc устройстб переводятся следящие уст ройства 54, 49, заломкнающие последние стабллизиругопше значения Р1 t- -я Ру , требуемь е на новом курсе5
и переключаются блоки перекл 0чени.я
вого угла курса5 на который иулось судно. Следяпгие ус -ройст-ва 34 .J 54, 49 переводятся в с. ,дящи х апериодических з}зе;1.ьев,, а блоки перетслю чени; 37, 38 лновь подключают выходные уси.гп1то,гп1 20, 21
BKJ
о о с
Ф о. р м у .л а
0
5
дольной,поперечной и курсовол стаси-- лизадиИ; каждый из которых состоит из последовательно соединенных пер вого интегратора, первого с-умматора. второго ннтегратора,третьего интегратора и второго суг матора входь которого подключенг соотБетст венно к выходу второго интегратора и к выходу первот о интеграт ора. первый третьего cyis&iaTopa в каждом канале подключен к выходу третьего интегратора5 а/выход к первому входу первого интегратора, BTopofty 0ХОДУ второго интегратор- - и птс;раму
П13
входу третьего интеграторл, датчик рассогласования продольной коордя- наты, выход которого подключен к второму входу третьего суммг.тора канала продольно.-; стабилизации, датчик рас- согласования поперечной координаты, выход которого соединен с вторым входом третьего су шатора канала поперечной стабилизации, последовательн соединенные датчи5 курса и приемник курса, первый выход которого подключен к входу первого фазочувствитель- ного усилителя, последовательно соедненные первый ключ, усилитель мощности и электродвигатель 5 выход которого подключен к второму входу приемника курса,управляющий вход, первого ключа соединен с выходом первого триггера а информационный вход - с выходом первого фазочувствительного усили- теля, о тли ч ающаяся тем, что, с целью поньшения точности системы, она содерлгит первый инвертор, второй ключ, последовательно соеди- ненные кнопку ввода, второй триггер, первое следящее устройство,четвертый сумматор и первый нуль-орган,последовательно соединенные второе следящее устройство 5 второй инвертор., первый умножитель, пятый сумматор,шее- той сумматор , третье следящее устройство и первьш блок переключения, последовательно соединенные четвертое следящее устройство, второй умно- ркитель,седьмой сумматор, восьмой . 1сумматор5 пятое следящее устройство И второй блок переключения, а также -;второй нуль-орган,задатчик курса, третий ключ, шестое следящее устройство,третий и четвертый умно}кители, последовательно соединенные второй фазочувствительный усилитель и девя- 1тый сумматор, источник опорного кап-, .ряжения и три четвертых интегратор а, каждьш из которых включен между вы- ходом третьего с г мматора и- вторым входом первого интегратора соответ-- ствующего канала стабилизаг ий,первый вход шестого следящего устройства подключен к выходу второго сумматора канала курсовой .стабилизации,второй вход к выходу первого триггера, к второму входу пятого следящего устройства, к втор-ому входу третьего следящего устройства, к второму вхо- ду первого блока перекхйочения, к входу первого инвертора .и к второму входу второго блока переключения,а выход шестого следяпдего устройства
0312
с 1слииен с вт(pы входом первого сум hinropa канала курсовой ст;1би.питации, третий г.ход второго блок порек-пючс- ПИЯ связан с вьсходом второго с :мато ра канала продольной стабялизаптги, с первым входом второго следящего устройства и с вторым входом восьмого сумматора, а выход - с вторым входом первого сумматора данного канала, выход второго следящего устройства подключен к первому входу третьего умножителя, а второй вход - к выходу второго триггера, к управляющему входу третьего ключа и к первому четвертого следящего устройства, соединенного вторым вхгдом с выходом второго сумматора канала поперечной стабилизациу, с вторым входом шестого сумматора, и с третьим входом первого блока переключения,зы код которого подключен ко второму входу первого cy мaтopa канала попе- речной стабилизации , второ вход третего умножителя связан с вь--.одом девя того сумматора и с первым чходом четвертого умн ожителя, а выход - с вторым входом седьмого сумматора, второй выход приемника курса подключен к входу второго фазочувствительного усилителя, выход источника опорного напряжения сЬединен с вторым входом девятого сумматора, выход первого фазочувствительного усилителя подключен к входу второго нуль-органа, к информационному входу второго ключа, к второму входу второго умножителя и второму входу первого умно- ,выход первого нуль-органа соединён с вторым входом второго триггера и с первым входом первого триггера, второй вход которого подключен к выходу второго нуль-органа, информационный вход третьего ключа соединен с выходом первого следящего устройства,, а выход - с четвертым входом второго сумматора канала курсовой стабилизации,первый вход которого связан с вторым -входом четвер- того сумматора, выход четвертого следящего устройства соединен с вторым входом четвертого умнокителя,подключенного выходом к второму входу пятого сумматора, выход второго ключа связан с вторым входом третьего сун- матора канала курсовой стабилизации, а управляющий вход - с выходом первого инвертора, выход задатчика курса соединен с вторым входом первого следящего устройства.
IL,™.
I Л f
I .;i I
is ©-Э 1 /|ч еН f
SГлжАтнтл-гги ла
I r
(U
5j
7
©0
L
ж
Q
ii
B)foS
h S
Упр.Вход
Bbt)(off
cpus.2
cpuS .S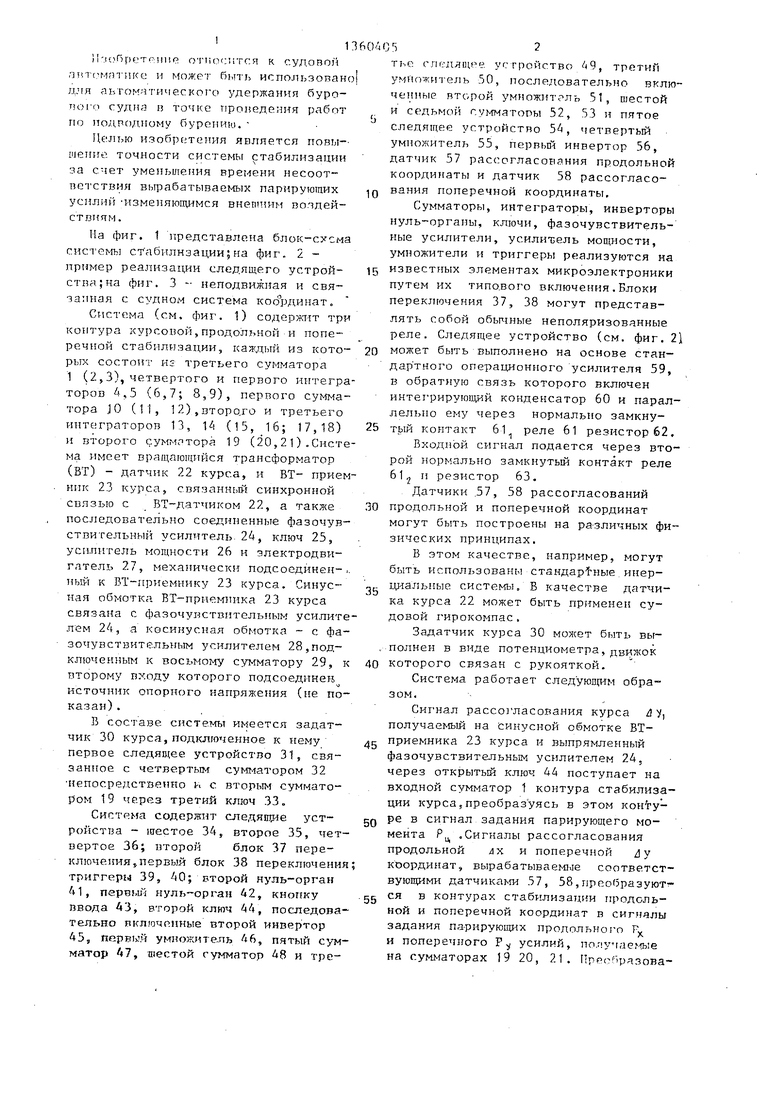


| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель местоположения бурового судна | 1983 |
|
SU1134928A1 |
| Система динамической стабилизации судна | 1985 |
|
SU1308040A1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| Устройство для моделирования выходных сигналов судового гирокомпаса | 1984 |
|
SU1233189A1 |
| Устройство для управления бортовыми рулями успокоителя качки судна | 1983 |
|
SU1147636A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ СОПРОВОЖДЕНИЯ ВОДОЛАЗА | 2017 |
|
RU2672505C1 |
| Устройство для моделирования м-фазного вентильного преобразователя | 1974 |
|
SU524200A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| Устройство для перестройки параметровАВТОРулЕВОгО | 1979 |
|
SU830325A1 |


Изобретение относится к судовой автоматике и может быть использовано для автоматического удержания буро- вого судна в точке проведения работ по подводному буреНию. Цель изобретения - повышение точности системы стабилизации. Поставленная цель достигается тем,что в систему динамической стабилизации бурового судна, содержащую датчики рассогласований продольной и поперечной координат, последовательно соединенные синхрон- НОИ связью вращающиеся трансформаторы (ВТ ) - датчик и приемник курса, три контура продольной,поперечной и курсовой стабилизации, каждый из которых состоит из первого сумматора, первого интегратора,второго сумматора,второго и третьего интеграторов и третьего сумматора,первый фазочувствительный усилитель,первый ключ,усилитель мощности и злектро- двигатель,соединенный с ВТ-приемни- ком курса, синусная обмотка которого подключена к первому фазочувстви- тельному усилителю, первый триггер, введены шесть сумматоров, четыре умножителя, два блока переключения,шесть следящих устройств, два нуль-органа, два ключа, два инвертора,задатчик угла разворота, второй триггер,кнопка ввода, второй фазочувствительный усилитель и три интегратора. 3 ил. (Л оо О5 о |
Составитель Л.Цаллагова Редактор В.Трубченко Техред А.Кравчук, Корректор Н.Король
Заказ 1089ТиражПод писное
Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, К-35, Раушская наб,,д. 4/5
Нроизводственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, i
| Система для динамической стабилизации судна | 1980 |
|
SU878646A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Design and analysis of a dynamic positioning system based on Kal- tnan filtering and optimal control, IEEE Transaction on automatic control | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
| . | |||
