1
Известно устройство для управления асинхронным двнгателем подъемного механизма при помощи механического тормоза с электрогидр авл.ическим толкателем, двигатель «оторо го подключен к роторной цепи приводного двигателя.
Недостатками -известного устройства являются ограниченный диапазол регулирования скорости, ступенчатое регулирование скорости электропривода на малых (посадочных) скоростях, н.алич1ие резко колебательных переходных процессов в электроприводе при пуске, обусловленных характеристиками электрогидравличеокого толкателя, управляемого по заи.
кону - const.
Изобретение позволяет устранить указанные недостатки. Это достигается тем, что двигатель электрогидравлического толкателя подключен к цепи ротора через дроссель насыщения, обмотка управления которого включена .на разность задающего напряжения и напряжения, пролорционального э.д.с. ротора приводного двигателя.
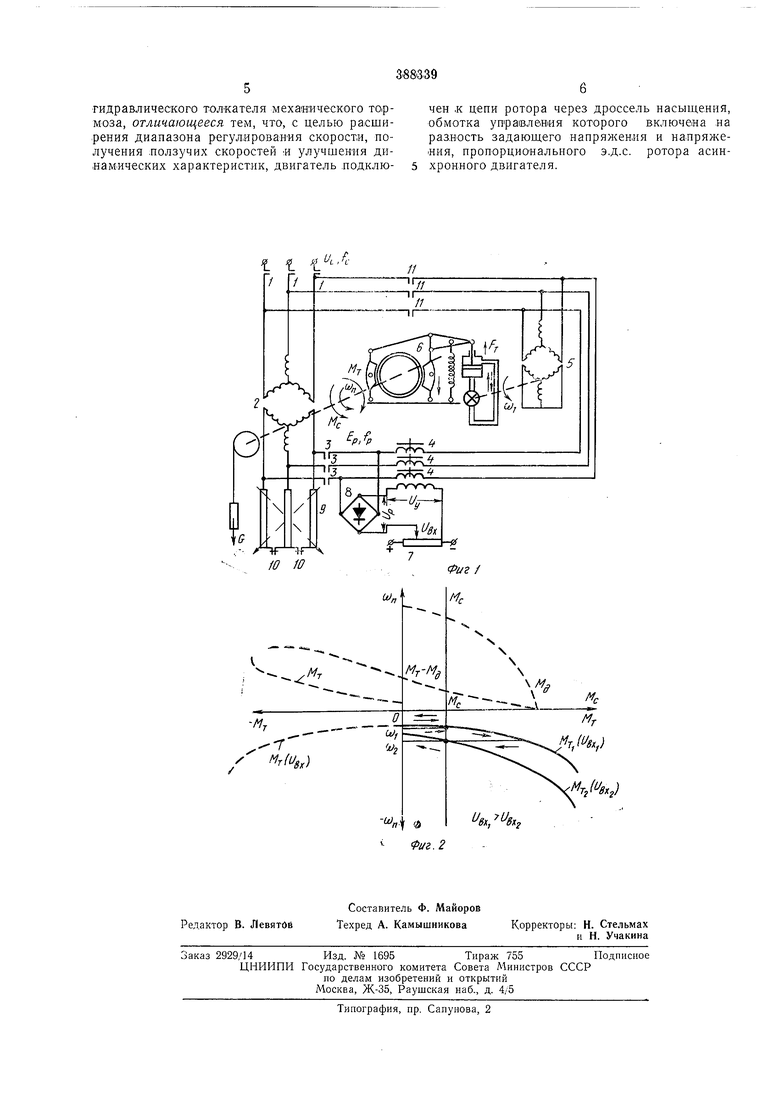
На фиг. 1 приведена иринципиальная схема предлагаемого устройства; на фиг. 2 - графики, поясняющие механические характеристики системы электропривода при регулировании скорости механизма в замкнутой системе с электрогидравлическим толкателем.
Устройство состоит из лодключенного к сети, через контакты / линейного контактора, приводного асинхронного двигателя 2, в цепь обмотки ротора которого через последовательно соединенные контакты 3 контактора малой скорости « рабочие обмотки дросселя насыщения 4 включена обмотка статора двигателя 5 электрогидравлического толкателя механического тормоза: 6. Обмотка управления дросселя (Насыщения 4 лодключена к последовательно соединенным источнику независимого налряжения 7 и выходу выпрямителя 8, включенного в цепь ротора приводного двигателя, содержащую реостаты 9 и нормально замкнутые контакты 10 контактора малой скорости, размыкающие роторную цепь.
Приводной асинхронный двигатель 2 может работать в режиме подъема груза при лодключении его к сети контактами /. В этом режиме механический тормоз 6 с электрогидравлическим толкателем мож-ет выполнять как свои обычные функции, так и функции регулятора скорости. В первОМ случае его двигатель
5 контактами 11 лодключается к сети, и тормозные колодки разжимаются. В таком положении схемы электропривода осуществляются реостатный пуск и работа на регулировочных характеристиках с помощью ступеней реостата 9 роторной цели приводного двигателя 2.
В случае силового спуска, спуска груза в то рмозиом режиме с противовключением :ил« сверхсияхронной скоростью Приводной двигатель 2 может быть подключеп ,к -сети реверсирующим контактором (на чертеже не нокаь зан), а двигатель 5 контактам.и 11. Наложе.ние тормозных колодок, то есть стопорение вала механизма происходит при отключении приводио го двигателя 2 от сети.
В режиме опускания груза с регулированием ско рости, а также для получения жестких механических характеристик в области м.алых и ползучих скоростей приводной двигатель переводится в режим асинхронного преобразователя частоты путем размыкания его роторной цепи (отключением контактов 10) и подключения к последней (посредством ко-нтактов малой скорости 5) двигателя электрогидр а в л и.ч еского толка те л я.
В этом режиме движение о;бусловл:ивается массой опускаемого груза, а пониженная скорость в системе получается благодаря подтормаживанию вала привода .механическим тормозом 6, тормозной момент которого регулируется автоматически с помощью электролидравлического толкателя.
Включенн-ем коетактов 3 цепи двигателя 5 обмотка управления дросселя насыщения 4 подключается на разность напряжений ротора ) UfHS, подводимого квыпрямителю 8, и задающего /вх- Эта разность UpnS - L/BX. которая в начале пуска имеет максимальное значение (), по мере разбега привода уменьщается, автоматически обеспечивая плавное изменение напряжения на зажимах двигателя 5. Происходит непрерывное сравнение сигнала, пропорционального скорости приводного двигателя 2, и задающего. От результирующего сигнала Uj UpiiS-LBX зависит степень насыщения дросселя 4 или уровень напряжения на дви-гателе 5, что, в свою очередь, обусловливает определенную скорость вращения его вала и связанного с ним лопастного колеса насоса электротидравлическото толкателя. Таким образом, толкающая сила Ff, пропорциональная квадрату скорости лопастного колеса насоса (или WT), изменяется в щироких пределах в зависимости от степени насыщения дросселя 4.
Тормозной мо;мент механического тормоза Мт (см. фиг. 2), который получается при взаимодействии сил упругой деформации тормозных пружин (Fa) и гидротолкателя (Ft), определяется в конечном итоге частотой (скоростью вр ащения приводного вала) и напряжением ротора приводного двигателя 2.
В полученной замкнутой системе с двумя жесткими отрицательными обратными связями по скорости в любой момент времени обеспечивается равновесие двумя моментами: моментом сопротивления (Мс), являющимся движущим, и тормозным MOMeHTOiM Мт
(моментом трения механического тормоза 6).
Дроссель насыщения 4, охваченный жесткой положительной обратной связью по на:пряжению ротора приводного двигателя 2 (или отрицательной по скорости) обеспечивает задание и поддержание необходимого уровня напряжения на зажимах статора двигателя 5 независимо от частоты тока ротора приводного двигаиеля 2 или его скорости. Благодаря электромагнитной инерции обМОТКИ управления дросселя на1сыщения 4 процесс нарастания или спадания тока в ней и, следовательно, повыщение или понижение напряжения на зажимах двигателя 5 и колебания скорости приводного вала двигателя 2
протекают достаточно плавно. Эта важная особенность предлагаемого устройства сводит на нет перерегулирования скорости в переходных режимах, а наличие обратной связи по скорости, охватывающей двигатель 5, полностью исключает возможность возникновения автоколебаний.
Регулятор скорости, охваченный жесткой отрицательной обратной связью по скорости приводного двигателя 2, обеспечивает поддержание заданного тормозного момента на его валу независимо от установленного уровня напряжения на двигателе 5. Эти два обстоятельства при совместном действии обеспечивают задание любого, по величине, тормозного момента и поддержание его постоянным с BI Iсокой степенью точности практически в достаточно большом диапазоне нагрузок и скоростей, ЧТО позволяет получить семейство жестких механических характеристик в области посадочных скоростей.
Таким образом регулирование скорости, а также полный останов привода или его повторный пуск в тормозном режиме с помощью электрогидравлического толкателя могут осуществляться соответствующим изменением уставки скорости f/nx. Переход системы с одной механической характеристики на другую осуществляется плавно, без перерегулирования скорости привода.
В случае необходимости регулирования скорости привода в режиме подъема с помощью электрогидравлического толкателя двигатель 5 последнего нормально открытыми контактами 3 контактора малой скорости подключается к зажимам ротора приводного двигателя 2. Нормально замкнутые контакты в цепи его ротора остаются замкнутыми. В этом режиме привод работает на регулировочных характеристиках, получаемых в результате наложения тормозной хара,ктеристики тИт и механических характеристик Мд (см. фиг. 2). Установившаяся скорость привода обеспечивается равновесием трех действующих на вал привода моментов: УЙд, Мт и MC.
предмет изобретения
Устройство для управления асинхронным
двигателем подъемного механизма, к цепи ротора которого подключен двигатель электрогидравлического толкателя механического тормоза, отличающееся тем, что, с целью расширения диапазона регулирования скорости, получения .ползучих скоростей :и улучшения динамических характеристик, двигатель .подключен ,к цепи ротора через дроссель насыше.ния, обмотка управления которого включена .на разность задаюшего напряжения и напряже|Ния, пропорционального э.д.с. ротора асинхронного двигателя.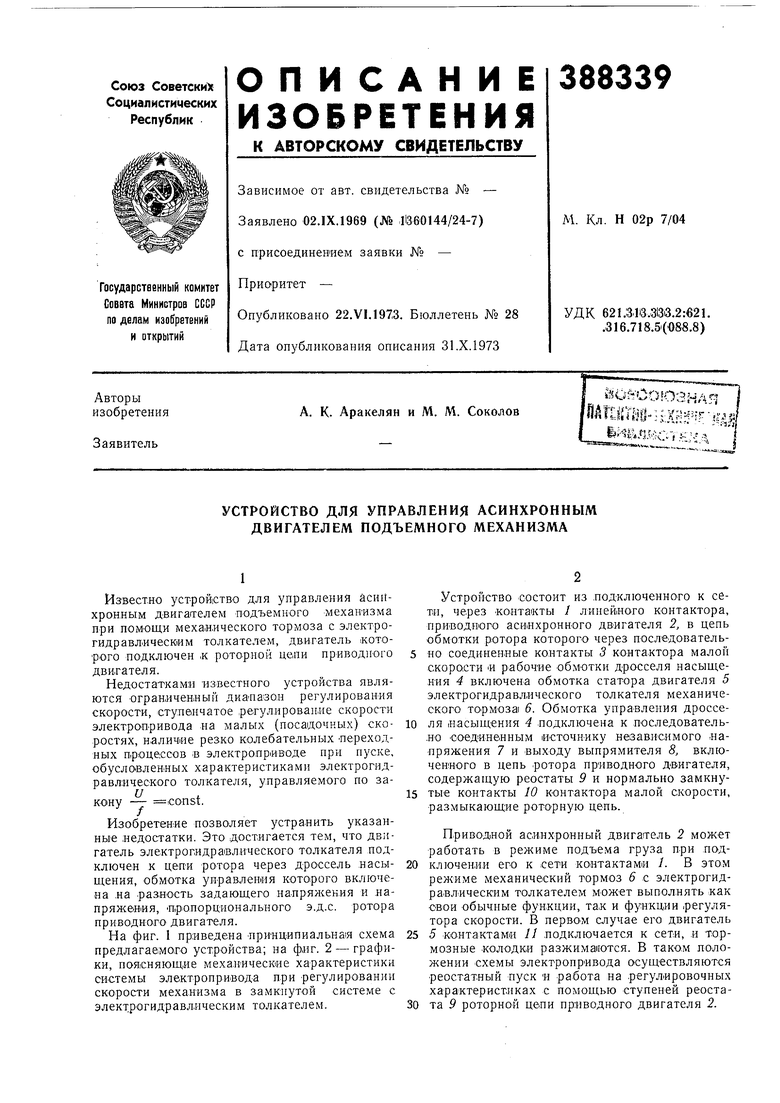

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1969 |
|
SU256023A1 |
| Электропривод | 1974 |
|
SU720647A1 |
| Асинхронный регулируемый электропривод для подъемных механизмов | 1972 |
|
SU445110A1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| ЭЛЕКТРОПРИВОД для ПОДЪЕМНЫХ МЕХАНИЗМОВ | 1965 |
|
SU171896A1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОГО ТОРМОЖЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1973 |
|
SU377948A1 |
| УСТРОЙСТВО СОВМЕЩЕННОГО ЭЛЕКТРИЧЕСКОГО ТОРМОЗА И ЭЛЕКТРОПРИВОДА ПОДАЧИ ДОЛОТА ДЛЯ БУРОВОЙ ЛЕБЕДКИ | 2002 |
|
RU2222490C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ | 1964 |
|
SU165215A1 |
| ЭЛЕКТРОПРИВОД | 2005 |
|
RU2277747C1 |
| Двухдвигательный электропривод | 1985 |
|
SU1310986A2 |