В известных электроприводах для подъемных механизмов, содержащих асинхронный двигатель механизма подъема и тормоз с электрогидравлическим толкателем, управляемым от отдельного двигателя, в качестве привода механизма похТ,ъема использован двигатель с контактными кольцами, что приводит к снижению энергетических показателей и надежности устройства.
В предлагаемом электроприводе, с целью повышения энергетических показателей и надежности, в качестве привода механизма подъема использован короткозамкнутый двигатель, а для питания двигателя электрогидравлического толкателя применен асинхронный преобразователь частоты, ротор которого жестко связан с валом короткозамкцутого двигателя.
С целью расширения диапазона регулирования, в цепь статора асинхронного преобразователя частоты включен автотрансформатор или дроссель насыщения.
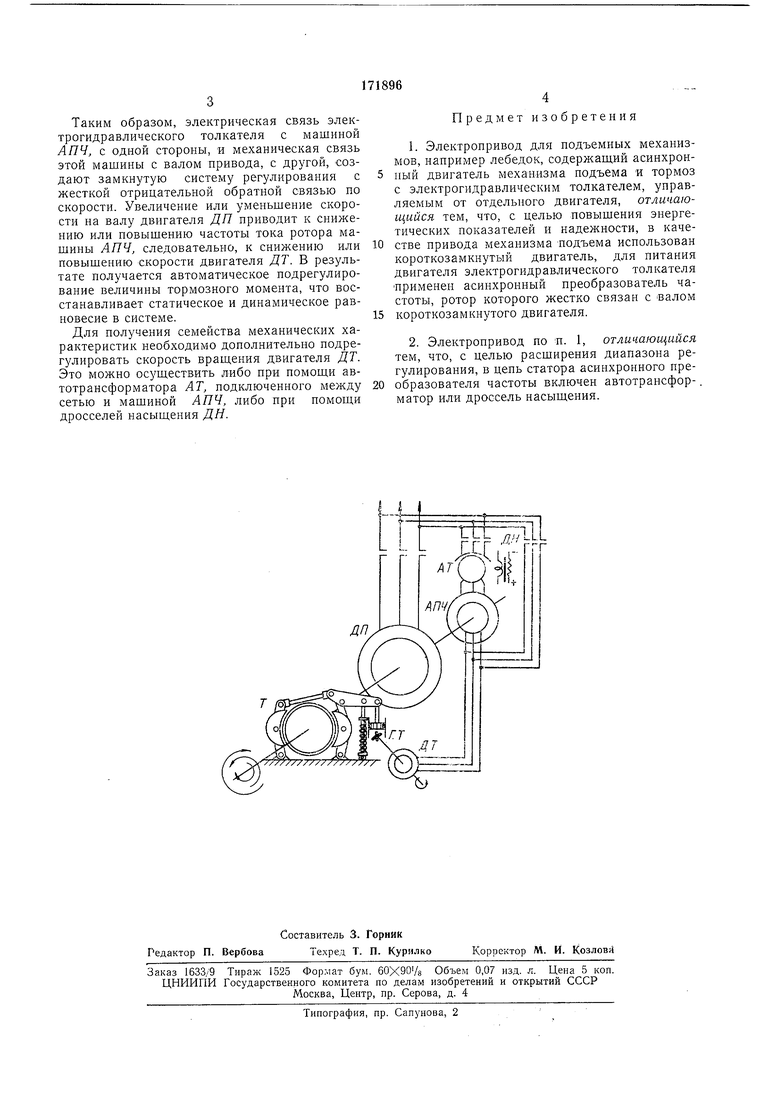
На чертеже приведена принципиальная схема предлагаемого устройства.
С валом двигателя ДЯ механизма подъема л естко сочленяется асинхронная машина АПЧ с контактными кольцами, соизмеримая по мощности с двигателем ДТ гидротолкателя ГГ. Эта мащина выполняет роль асинхронного преобразователя частоты и является источником питания для двигателя гидротолкателя.
При подключении ее к питающей сети и вращении ротора этой мащины по направлению вращения магнитного поля статора или противоположно ему на выходе (на контактных кольцах АПЧ) получается напряжение переменной частоты, пропорциональное величине скольл ения ротора машины АПЧ E2 Lli-S; где Е, fz - соответственно напряжение и частота на зажимах статорной обмотки асинхронного сервопривода, Ui, f - соответственно напряжение и частота на входе асинхронного преобразователя частоты, 5 - скольжение. Если пренебречь падением напряжения в
цепи ротор машины АПЧ - статор двигателя ДТ, отнощение const. Это обстоя/2/с
тельство используется для управления скоростью вращения двигателя ДТ и получения
регулируемого усилия на порщне гидротол сателя.
При питании двигателя ДТ с колец машины АПЧ возникает взаимодействие сил упругой деформации тормозной пружины и переменного усилия поршня гидротолкателя. Получается регулируемая тормозная сила на колодках механического тормоза Т, которая и обусловливает регулируемый тормозной момент, зависящий от частоты тока ротора (скорости)
Таким образом, электрическая связь электрогидравлического толкателя с машиной АПЧ, с одной стороны, и механическая связь этой машины с валом привода, с другой, создают замкнутую систему регулирования с жесткой отрицательной обратной связью по скорости. Увеличение или уменьшение скорости на валу двигателя ДП приводит к снижению или повышению частоты тока ротора машины АПЧ, следовательно, к снижению или повышению скорости двигателя ДТ. В результате получается автоматическое подрегулирование величины тормозного момента, что восстанавливает статическое и динамическое равновесие в системе.
Для получения семейства механических характеристик необходимо дополнительно подрегулировать скорость двигателя ДТ. Это можно осуш,ествить либо при помош,и автотрансформатора AT, подключенного между сетью и машиной АПЧ, либо при помош,и дросселей насыш,ения ДН.
Предмет изобретения
1.Электропривод для подъемных механизмов, например лебедок, содержаш,ий асинхронный двигатель механизма подъема и тормоз с электрогидравлическим толкателем, управляемым от отдельного двигателя, отличающийся тем, что, с целью повышения энергетических показателей и надежности, в качестве привода механизма подъема использован короткозамкнутый двигатель, для питания двигателя электрогидравлического толкателя Применен асинхронный преобразователь частоты, ротор которого жестко связан с валом
короткозамкнутого двигателя.
2.Электропривод по п. 1, отличающийся тем, что, с целью расширения диапазона регулирования, в цепь статора асинхронного преобразователя частоты включен автотрансфор-. матор или дроссель насыщения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1969 |
|
SU256023A1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| Асинхронный регулируемый электропривод для подъемных механизмов | 1972 |
|
SU445110A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ ПОДЪЕМНОГО МЕХАНИЗМА | 1973 |
|
SU388339A1 |
| Электропривод | 1974 |
|
SU720647A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ | 1964 |
|
SU165215A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Система частотно-регулируемого асинхронного электропривода крано-манипуляторной установки (Система ЧРАП КМУ) | 2023 |
|
RU2820159C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОМАШИННЫЙ АГРЕГАТ | 1971 |
|
SU311362A1 |
-ГПГТЯИ ГГГ ггг ,г
АТ( ) |;
