1
Изобретение может быть использовано а подъемных лебедках электрических кранов, в подъемниках, грузовых лифтах и в других подъемных механизмах вертикального движения малой И средней мощности для получения регулировочных механических характеристик в области малых (посадочных) скоростей при опускании грузов. ,
Известны автоматизированные электроприводы для подъемных механизмов с короткозам.кнутым асинхронным двигателем и электрогидравлическим толкателем, обеспечивающие опускание грузов на малой скорости иутем притормаживания приводного вала с помощью тормозного устройства с электрогидравлическим толкателем, питаемого от специального преобразователя частоты или от сети переменного тока через дроссели насыщения.
Однако ъ таких электроприводах предполагается опускание груза при отключенном основном двигателе от сети, что не исключает возможности его свободного падения в случае полностью разжатых колодок тормозного устройства. Кроме того, привод практически не может обеспечить регулирование скорости в режиме силового спуска. Необходи уюсть применения дополнительных специальных аппаратов, регулятора и коммутирующих контакторных устройств делает известные схемы
электроприводов относительно громоздкими и менее надежными. Осуществление же работы схем без отключения основного двигателя от сети хотя и позволяет получать пригодные для
эксплуатации механические характеристики привода путем наложения характеристик двигателя и тормозной системы, но связано со значительными потерями энергии в двигателе (вследствие относительно больших скольжеНИИ ротора) и на тормозном устройстве (вследствие большого суммарного движущего момента на приводном валу).
Цель изобретения - предотвращение свободного падения груза, реализация режима
силового спуска на малых (посадочных) скоростях и улучшение статических и динамических свойств системы электропривода.
Это достигагется тем,, что в предлагаемом электроприводе основной двигатель подъемного механизма и двигатель электрогидравлического толкателя соединены параллельно и подключены к одному источнику регулируемого напряжения, охваченного эквивалентной обратной связью по скорости основного двигателя (жесткой отрицательной связью по напряжению и положительной обратной связью по току).
Предлагаемый электропривод практически бесконтактный, надежный и относительно экономичный. Он исключает возможность свободного падения груза при опускании, так как при увеличении подводимого к двигателю гидротолкателя напряжения (когда колодки тормоза отжаты) основной двигатель может работать яа естественной характеристике в генераторном режиме. Опускание груза па регулировочной характеристике привода обеспечивается при значительном понижении напряжения на зажимах основного двигателя, вследствие чего последний развивает незначительный момент, .потребляя при этом из сети сравнительно малую энергию.
Регулировочные характеристики предлагаемого электропривода имеют большую жесткость по сравнению с характеристиками известных приводов, так как они получаются путем наложения механических характеристик тормозного устройства и двигателя, управляемых от статического иреобразователя в замкнутой системе.
Предлагаемая схема привода, кроме того, позволяет формировать характер переходных режимов системы электропривода не только в режиме опускания груза, но также и в режиме подъема.
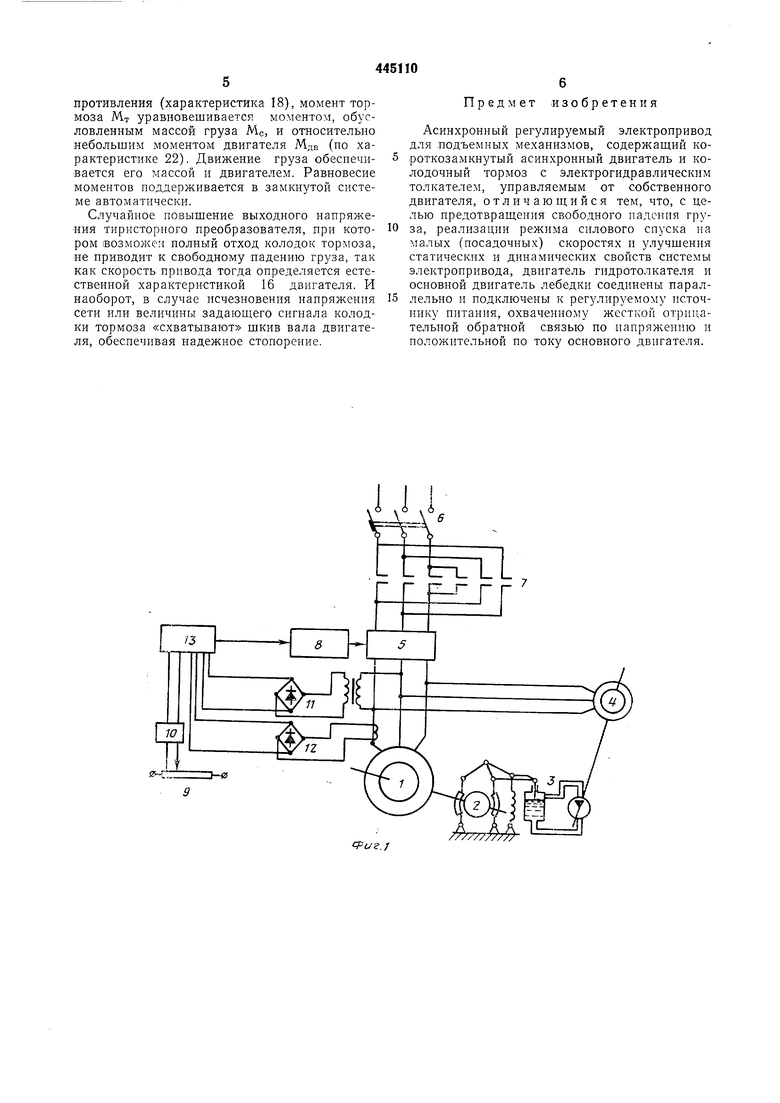
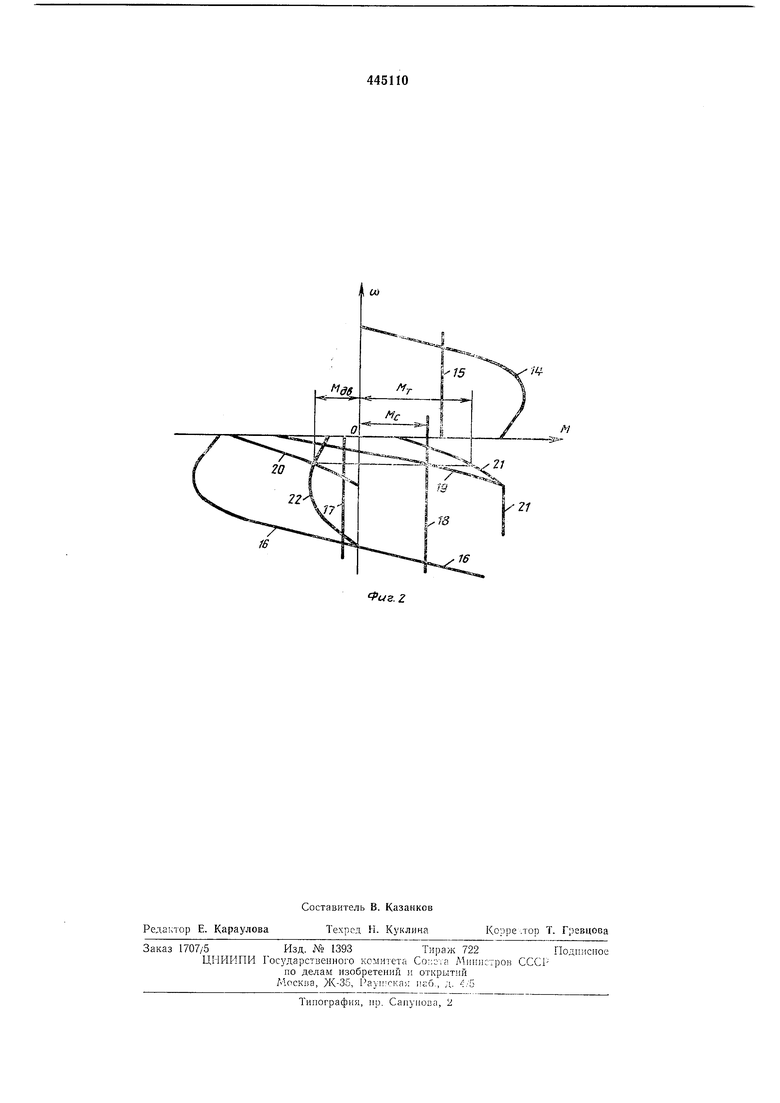
На фиг. 1 приведена схема предлагаемого электропривода; на фиг. 2 - графики (механические характеристики привода), поясняющие принцип работы замкнутой системы электропривода подъемного механизма, а также методику построения механических характеритик замкнутой системы.
Электропривод состоит из приводного (основного) асинхронного короткозамкнутого двигателя 1, колодочного тормоза 2 с электрогидравлическим толкателем 3, управляемым от своего электродвигателя 4. Двигатели 1 и 4, работающие параллельно, получают питание от одного тиристорного регулятора 5 напряжения, подключенного к сети через автомат 6 и контактный реверсор 7. Управление тиристорньш регулятором 5 осуществляется от системы 8 импульсно-фазового управления.
Регулирование скорости привода производится изменением задающего напряжения задатчика 9. Формирование переходного процесса определяется задатчиком 10 ускорений. Жесткость характеристик привода поддерживается отрицательной обратной связью по напряжению, обеспечиваемой цепью 11, и положительной по току (цепь 12) основного двигателя 1. Суммирование сигналов задающих и обратных связей осуществляется усилителем 13.
Электропривод работает следующим образом.
Приводной асинхронный двигатель 1 работает в режиме подъема при подключении его к сети реверсором 7 на «Подъем. В этом режиме максимальным напряжением задатчика 10 обеспечивается полное отпирание тиристоров регулятора напряжения. При этом колодки тормоза полностью разжаты, и установивщаяся скорость привода определяется естественной характеристикой 14 двигателя и характеристикой 15 момента сопротивления (фиг. 2).
Во время иуска привода на подъем груза задатчик ускорения 10 формирует управляющий сигна.ч во времени по линейному за.кону, что приводит к постепенному нарастанию напряжения на зажимах основного двигателя 1
и развиваемого им момента. При этом электрогидравлический толкатель 3, управляемый двигателем 4, обеспечивает илавный отход колодок тормоза и, как следствие, плавное уменьшение тормозного момента на шкиве.
Таким образом формируется по времени желаемый характер динамического момента в системе привода, а следовательно, обеспечивается заданная величина ускорений иривода при разбеге.
Опускание груза осуществляется включением контактного реверсора «Назад. Скорость двигателя 1 при работе на естественной характеристике 16 определяется величиной опускаемого груза. Так, при опускании порожнего крюка (характеристика 17 момента сопротивления на валу двигателя) двигатель работает в режиме силового спуска. При опускании тяжелого груза (характеристика 18 момента сопротивления) двигатель работает со сверхсинхронной скоростью в генераторном режиме (тормозной спуск).
Схема позволяет осуществить пуск привода как на максимальную, так и регулировочную
скорость.
С целью перевода привода с высокой на пониженную регулировочную скорость уменьшается величина задающего сигнала задатчика 9. Плавность протекающего нри этом переходного процесса осуществляется за счет линейного уменьшения управляющего сигнала, формируемого задатчиком 10 ускорений.
Регулировочная характеристика 19 привода,
позволяющая опускать грузы па малых скоростях, получается в результате наложения характеристики 20 основного двигателя и характеристики 21 тормоза в замкнутой системе. Большей регулировочной скорости привода
при опускапии одинакового по весу груза соответствует большая величина задающего сигнала.
Из ностроений на фиг. 2 видно, что жесткость результирующей регулировочной характеристики 19 привода предлагаемой системы значительно выше, чем жесткость каждой из характеристик 20 и 21, которые соответствуют известным схемам, поскольку в новой схеме действие обратной связи проявляется как в
автоматическом регулировании тормозного момента, так и изменении момента двигателя. Регулировочная характеристика 19 позволяет обеспечить опускание как легких, так и тяжелых грузов. При опускании тяжелых грузов, что соответствует, например, моменту сопротивления (характеристика 18), момент тормоза Мт уравновешивается моментом, обусловленным массой груза Мс, и относительно небольшим моментом двигателя Мдв (но характеристике 22). Движение груза обеснечивается его массой и двигателем. Равновесие моментов поддерживается в замкнутой системе автоматически.
Случайное повышение выходного напряжения тиристорного преобразователя, при котором возможен нолный отход колодок тормоза, не приводит к свободному падению груза, так как скорость привода тогда определяется естественной характеристикой 16 двигателя. И наоборот, в случае исчезновения напряжения сети или величины задающего сигнала колодки тормоза «схватывают шкив вала двигателя, обеспечивая надежное стопорение.
Предмет изобретения
Асинхронный регулируемый электропривод для .подъемных механизмов, содержащий короткозамкнутый асинхронный двигатель и колодочный тормоз с электрогидравлическим толкателем, управляемым от собственного двигателя, отличающийся тем, что, с целью предотвращения свободного падспня груза, реализации режима силового спуска на малых (посадочных) скоростях и улучшения статических и динамических свойств системы электропривода, двигатель гидротолкателя и основной двигатель лебедки соединены параллельно и подключены к регулируемому источнику питания, охваченному жесткой отрицательной обратной связью по напряжению и положительной по току основного двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1974 |
|
SU720647A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ ПОДЪЕМНОГО МЕХАНИЗМА | 1973 |
|
SU388339A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1969 |
|
SU256023A1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЗАЦИЕЙ ПУСКО-ТОРМОЗНЫХ РЕЖИМОВ ДРОССЕЛЬНОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2006 |
|
RU2311725C1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| ЭЛЕКТРОПРИВОД для ПОДЪЕМНЫХ МЕХАНИЗМОВ | 1965 |
|
SU171896A1 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| ЭЛЕКТРОПРИВОД | 2001 |
|
RU2210853C2 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
ffu-г. /
16
т
