В основном патенте №18260 описано приспособление для переворачивания овальных папирос швом вниз при их подаче к упаковочной машине; в приспособлении применены транспортер, состоящий из двух цепей, снабженных колодками с желобками для помещения в них папирос, и упоры, выдвигаемые снизу при нажатии соответствующей клавиши и служащие для поворачивания неправильно лежащих на колодках папирос.
Предлагаемое приспособление предназначается для обслуживания устройства, в котором папиросы, назначенные к упаковке, подаются уложенными в два или несколько рядов. Для передачи папирос с одного конвейера на другой, применен снабженный упорами для поворачивания их, толкач, а для выдвигания и убирания упоров - механизмы, состоящие из кнопок с собачками, удерживающими в нижнем положении упоры, которые выдвигаются и опускаются под действием подпружиненных рычагов и кулаков.
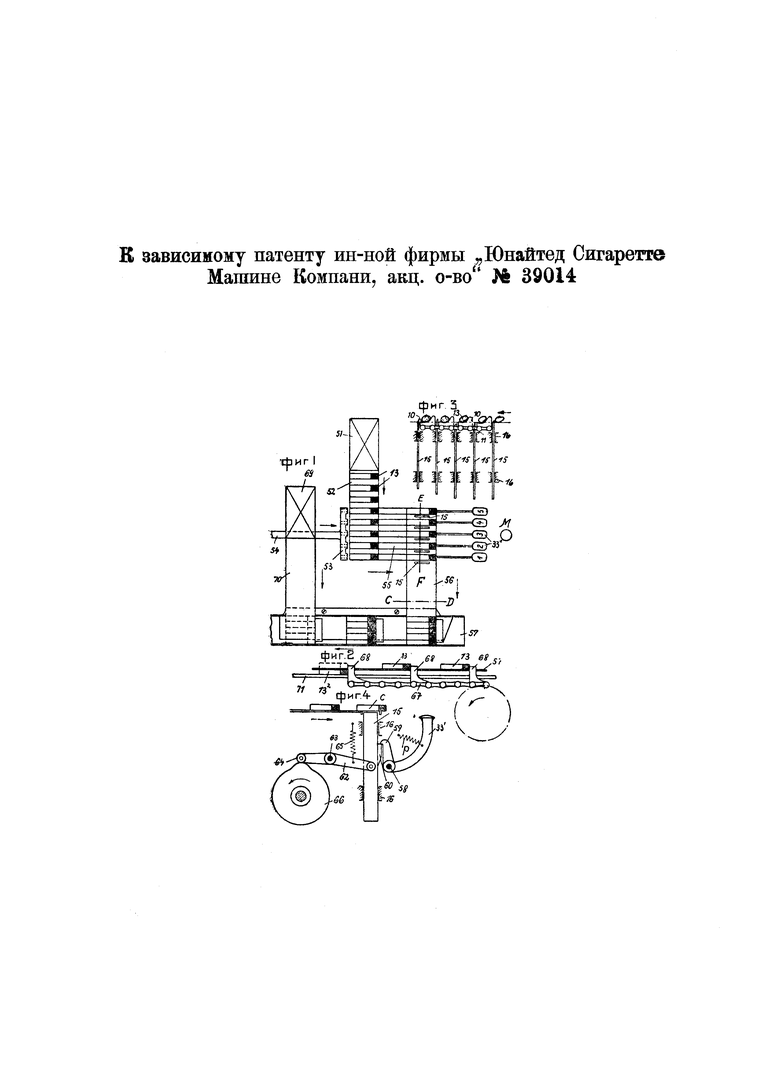
На схематическом чертеже фиг. 1 изображает вид предлагаемого приспособления сверху; фиг. 2 - то же, вид сбоку; фиг. 3 - разрез по EF на фиг. 1; фиг. 4 - разрез по CD на фиг. 1.
Приспособление состоит из воронок 59 и 69, подающих папиросы на конвейеры 52 и 70, толкача 53, передающего по помосту 55 папиросы верхнего ряда на конвейер 56, и транспортера 57, принимающего папиросы как с конвейера 70, так и с конвейера 56, снабженного упорами для поворачивания папирос швом вниз.
Папиросы для верхнего ряда подаются из воронки 51 к ленте или цепи конвейера 52, которая принимает отдельные папиросы с определенными промежутками между ними и транспортирует их дальше. Конвейер 52 доводит папиросы до толкача 53, который продвигается в направлении стрелки при помощи штанги 54, приводимой с перерывами в движение каким-нибудь не изображенным на чертеже приспособлением. Толкач двигает папиросы через неподвижный помост 55 на конвейер 56, состоящий из цепных звеньев 10, которые соединены между собой колодками 11, и несут на себе папиросы 13 (фиг. 3). Конвейер работает тоже с перерывами, т.е. останавливается, чтобы толкач 53 мог наложить на него ряд из пяти папирос, а затем начинает двигаться в направлении стрелки к следующему транспортеру 57. Конвейер 56 снабжен системой упоров 15, перемещаемых вертикально в направляющих 16 и служащих для поворачивания неправильно лежащих на звеньях 10 папирос. Управление упорами или планками 15 производится посредством кнопок 331, которые имеют форму углового рычага и качаются около оси 58 (фиг. 4). Второе плечо углового рычага составляет собачку 59, которая зацепляется за выступ 60 на упоре 15 и удерживается в защелкнутом положении пружиной р. С упорами 15 шарнирно соединен двуплечий рычаг 62, который качается около оси 63 и снабжен на свободном конце роликом 64, удерживаемым при помощи пружины 65 в сцеплении с вращающейся кулачной шайбой 66.
Рабочий, находящийся в месте М (фиг. 1), наблюдает пять передних папирос, продвинутых толкачом по направлению к нему на помост 55. Как только папиросы перейдут на конвейер 56, рабочий нажимает, еще до начала движения конвейера, клавиши 33, которые соответствуют неправильно лежащим папиросам. Благодаря этому освобождаются соответствующие упоры 15, которые до этого были застопорены собачками 59 и которые теперь под действием пружины 65 могут сдвинуться вверх и занять положение, указанное на фиг. 3 для передних двух планок. Во время начавшегося затем движения конвейера 56 неправильно лежащие папиросы переворачиваются и подаются к транспортеру 57, а за это время кулачная шайба 66 поворачивается так, что ее кулак оказывается в положении, изображенном на фиг. 2, при котором упоры 15 оттягиваются с пути папирос вниз, пока собачки 59 их снова не застопорят.
На транспортере 57 папиросы (фиг. 1 и 2) лежат так плотно друг к другу, как они должны лежать в пакетах. Вместе с транспортером 57 работает цепь 67 (фиг. 2), снабженная захватывателями 68. Последние захватывают лежащие на ленте транспортера 57 в правильном положении папиросы и накладывают их на второй слой папирос 132, который за это время был доставлен из другой воронки 69 с помощью конвейера 70 на конвейер 71 (фиг. 9). Оба ряда проталкиваются захватывателями 68 дальше и доставляются в упаковочную машину. Работа конвейера и толкача 53 совершается с перерывами с помощью периодически работающих приводов. Кнопки 331 могут быть установлены неподвижно в определенном месте; тогда работа их должна происходить раньше, чем конвейер начнет двигаться после приема папирос. Однако, можно поместить кнопки и упоры 15 вместе и заставить двигаться переворачивающее папиросы устройство в направлении движения ленты конвейера 56, чтобы оно двигалось некоторое время вместе с папиросами и наблюдатель имел больше времени для нажатия клавиши. Только по истечении некоторого времени клавишное устройство возвращается в свое первоначальное положение и при этом совершается переворачивание папирос при помощи упоров. Движение взад и вперед всего комплекта, содержащего упоры и связанные с ними приспособления, может совершаться с помощью любого привода, как кривошип, колесо и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПОВОРАЧИВАНИЯ ОВАЛЬНЫХ ПАПИРОС ШВОМ ВНИЗ | 1929 |
|
SU39013A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПЕРЕВОРАЧИВАНИЯ ОВАЛЬНЫХ ПАПИРОС ПРИ ИХ ПОДАЧЕ К УПАКОВОЧНОЙ МАШИНЕ | 1929 |
|
SU18260A1 |
| МАШИНА ДЛЯ УПАКОВКИ ПАПИРОС | 1927 |
|
SU11163A1 |
| Аппарат для подачи папирос в упаковочных машинах | 1924 |
|
SU1873A1 |
| МАШИНА ДЛЯ ИЗГОТОВЛЕНИЯ КАРТУЗОВ | 1926 |
|
SU7985A1 |
| Приспособление для поворачивания плоских папирос швом вниз | 1929 |
|
SU35750A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ КИРПИЧА НА СТЕНУ СТРОЯЩЕГОСЯ ЗДАНИЯ | 1934 |
|
SU47226A1 |
| Пишущая машина | 1934 |
|
SU43012A1 |
| СПОСОБ И МАШИНА ДЛЯ АВТОМАТИЧЕСКОГО КОПИРОВАНИЯ СЧЕТНЫХ ЗАПИСЕЙ НА КАРТОЧКАХ | 1926 |
|
SU6634A1 |
| Приспособление для поворачивания плоских папирос швом вниз | 1929 |
|
SU19527A1 |
1. Форма выполнения приспособления по патенту №18260, отличающаяся применением толкача 53, предназначенного для передачи папирос с конвейера 52 на конвейер 56, снабженный системой упоров 15.
2. В приспособлении, охарактеризованном в п. 1, применение механизмов, служащих для выдвигания и убирания упоров 15 и состоящих из кнопок 331, снабженных собачками 59, удерживающими упоры в нижнем положении вопреки действию пружин 65, и кулаков 66, предназначенных для отвода упоров обратно вниз.
