Изобретение относится к асинхрссвным тяговым электронриводам и 1предназ1начено для (управления частотой тока статора асинхрОНного тягового электродвигателя локомотива путем воздействия иа систему управления преобразователем частоты, питающего тяговый двигатель.
Известны устройства для управления частотой аОИНХронного тяговото электродвигателя путем измерения вредней -скорости вращения ротора и автоматического .регулирования на поддержание частоты тока ротора в нужных пределах. Однако такие устройства «е учитывают крутильных колебаний, возникающих ;в тяговОМ электрод вита,теле при проходе колесом 1неровностей пути, что при жесткой естественной характеристике асиихроотного тягового элекггродвигателя приводит к са мопроизвольному переходу в генераторный .
Целью изобретения является по1вышвние надежности и устойчивости (устройства в работе.
Это доотигается тем, что предлатаемое устройство снабжено геиератором абсолютного 1окольже1ния, каждая фаза которого соединена с соответствующем датчиком уплового перемещел1,ия ротора, выполненным по диффе(р9нциальиой схеме, а общий выход датчиков соединен со входом оисте.мъ управления
преобразователем частоты. Частота 1входных импульсов системы управления преобразователем частоты получается «суммированием мпновениого значения частоты 1вращен ия ротора тя;го вого электродвигателя, измеряемой датчиком, и частоты генератора абсолютного скольжения. Суммирование осуществляется непосредствеино в датчике путем получения одной боковой частоты посредством многофазной модуляции.
Устройство состоит из генератора абсолютного скольжения, выходной сигНал которого представляет собой многофазную систему ои1нусоидальных /напряжений с частотой,
требуемой по условиям движения частоте тока ротора тяговош электродвигателя, датчика и системы управления преобразователем частоты.
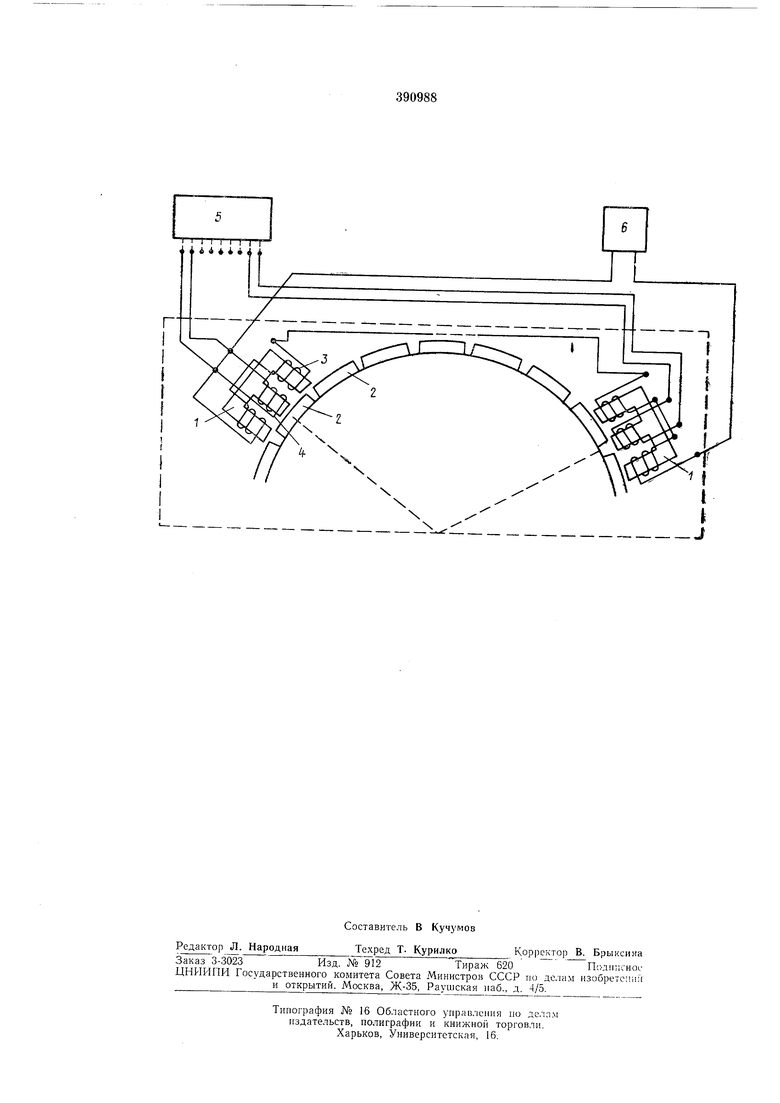
На чертеже представлена электрическая
схема подключения катушек датчика.
Датчик углового перемещения с диффеРйнциальной магнитной системой / закреплен на остове тягового элентроивигателя.
Размеры Ш-образиого сердечника датчика
1, замыкающей роторной шихтоваииой вставки 2 и воздушного зазора 1подоб|раны так, что выходное иапряжвние 3 иаменяется по сищусоидальному закону в функции угла поворота ротора датч1ика при наличии питающего напряжения «а возбуждающей катущке датчика 4, которые подключены к генератору 5 абсолютното скольжения. На1пряжон ие Первой фазы гбнвратора 5 абсолютного скольжения тостунает на возбуждающую .катушку лерюой фазы датчика, а напряжение последующих фаз на соответСФВ(ующие фазы датчика. Для пол|учения .М1ногофаэной .системы установлено -несколько одинакоБЫх Ш-0браз нь1х сердеч1нико В. Числ-о ротора датчика олределано но числу naip -полюсов тятов ого двигателя и 1Коэ:фф ИЦиенту деления пе(ре10четного кольца системы упра;вления преобразователем частоты. Выходные катушки 3 всех сердеч1Никс1Б соединены тоследователыно и подключены ко входу си атемы управления преобразователом частоты 6. Устройство работает следующим образоМ. При вращении ротора датчика иатряжение на выходе 77г-ой фазы датчика равно eof + () «,« sin Xsinlcofti-u- С - и h Vb - а1М1Плит|уда -напряжения на выходе генератора абсолю)тного скольжения;со - угловая частота его напряжения; Шй - угловая частота вращевия .ротора ТЯ1ГОВОГО электродвигателя. После С|ум1мироваш-1я выходных напряжений всех фаз датчика получается результирующее на.пряжвние и Uft sin (ш -;; ш,) /. Знак в аргументе тригонометрической функции зависит от режима работы тягового электродвигателя: в тяговом режиме-плюс, при рекуперации-(МИнус. Изменение знака достигается изменением шорядка чаредоваиия фаз генератора абсолютного скольжения. Синусоидальный сигнал (С датчика nocTiytnaeT на вход Системы |у1правлания преобразователем частоты и используется для задания частоты тока статора асинхронного тягового электродвигателя. П р е д 1м ет изоб|рете «i и я Устройство для управления частотой асинхронного тягового электродвигателя, содержащее датчик частоты вращения фотора электродвигателя, воздействующий на систему управлен1ия преобразователем частоты, отличающееся тем, что, с целью повышения устойчивости и стабильности работы, оно Она.бжено -многофазным raiiapaiTOpo/M абсолютного скольжения, каждая фаза которого питает катушку возбуждения указанного датчика, выполненного с числом фаз, равмым числу фаз генератора, и все выходные катушки которого соединены носледовательнО.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления многодвигательным приводом | 1978 |
|
SU1310992A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО С РЕГУЛИРУЕМЫМ КОЭФФИЦИЕНТОМ ПЕРЕДАЧИ СКОРОСТИ ВРАЩЕНИЯ | 1970 |
|
SU265264A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления /его варианты/ | 1982 |
|
SU1538212A1 |
| Устройство длля управления асинхронным электродвигателем | 1979 |
|
SU928583A1 |
| Электропривод переменного тока | 1980 |
|
SU1114358A3 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| Устройство управления частотой асинхронных тяговых двигателей локомотива | 1978 |
|
SU740551A1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| Способ управления частотой многодвигательного тягового электропривода | 1983 |
|
SU1121765A1 |