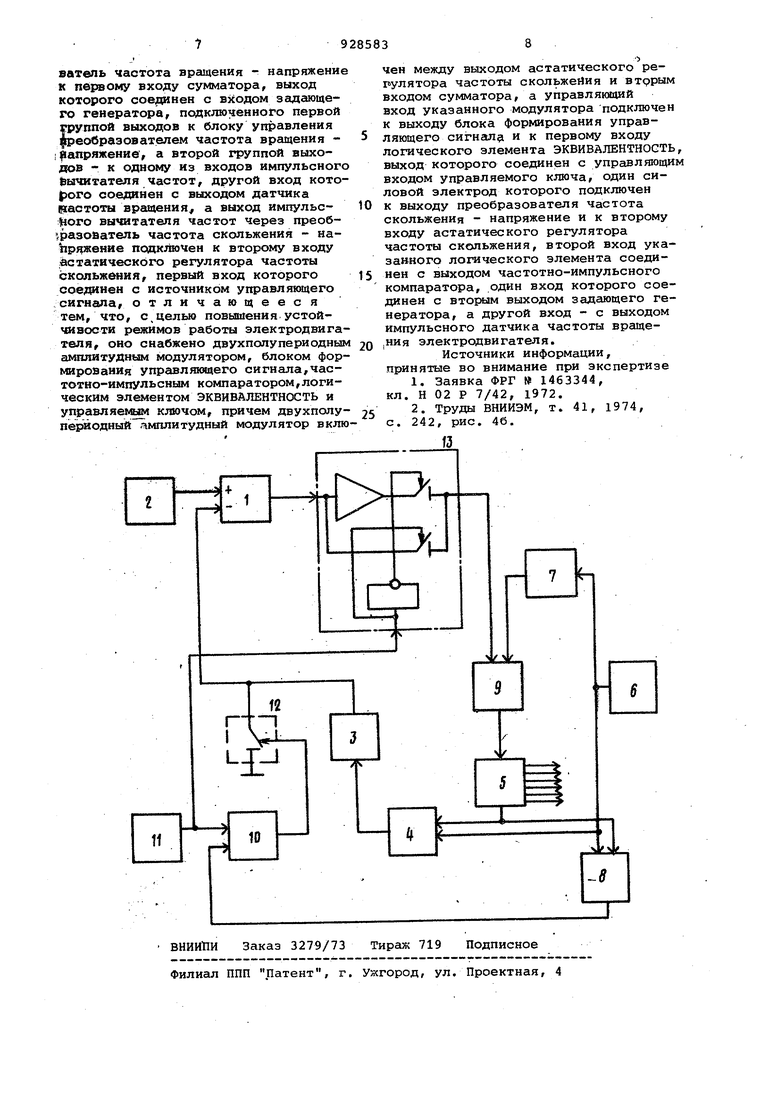
Изобретение относится к электро технике, а именно к устройствам дл регулирования крутящего момента электродвигателя путем изменения частоты питающего напряжения, и мо жет найти применение в различных электротехнических установках, в частности в устройствах для управления тяговыми вентильными электро приводами переменного тока с частотным управлением. Известно устройство для управле ния асинхронным двигателем, содержащее блок измерения частоты враще ния ротора, блок задания частоты скольжения, выходы которых через сумматор частот подсоединены к у.правляющим цепям преобразователя, к выходу которого подключен асинхронный электродвигатель. При тормо жении электродвигателя в этом устройстве изменяют зиак задаваемой частоты скольжения 111. Недостаток устройства состоит в том, что частота скольжения не р гулируется. Этоне позволяет получить оптимальные характеристики электродвигателя в разных режимах. Наиболее близким к изобретению является устройство-для управления асинхронным электродвигателем, содержащее импульсный датчик частоты вращения, подключенный через преобразователь частота вращения - напряжение к первому входу сумматора, выход которого соединен со входом задающего генератора, подключенного к одному из входов импульсного вычитателя частот, другой вход которогчэ . соединен с выходом упомянутого датчика частоты вращения, а выход импульсного вычитателя частот через ; преобразователь частота скольжения - напряжение подключен ко второму входу астатического регулятора частоты скольжения, первый вход которого соединен с источником управляющего сигнала 2. Это устройство не позволяет реализовать управляемый генераторный режим асинхронного электродвигателя необходикый для осуществления рекуперативного торможения электропривода. Кроме того, при работе асинхронного электродвигателя с малыми скопьжеиияко в двигательном режиме (иапример, режим выбега) и наличии возмущающих воздействий (сброс эадешия, сброс, наброс тормозного молента) в электроприводе возможен неуправляемый и необратимый переход электродвигателя из двигательного .8 генераторный режим с максимальным |Ь . Такой режим в известном устройстве возникает из-за обратной связи, пропорциональной модулю частоты скольжения, и имеет место при перерегулировании ,jb в указанных динамических режимах с изменением знака напряжения на выходе астатического регулятора при отработке возмущающего воздействия, что снижает устойчивость двигателя. Целью изобретения является повышение устойчивости режимов работы электродвигателя, улучшение качестза регулирования. Поставленная цель достигается тем, что устройство для управления асинхронным электродвигателем, содержащее импульсный датчик частоты .вращения, подключенный через преобразователь частота вращения - напря жение к первому входу сумматора, выход которого соединен со входом задающего генератора, подключенного к одному из входов импульсного вычи тателя частот, другой вход которого соединен с выходом датчика частоты вращения, а выход импульсного вычитателя частот через преобразователь частота скольжения - напряжение под ключен ко второму входу астатическо регулятора частоты скольжения, первый Вход которого соединен с источником управляющего сигнала, снабжено двухполупериодньм амплитудным мо дулятором, управляемым от блока формирования управляющего сигнала и включенным между выходом регулятора частоты скольжения и другим выходом сумматора, логическим элементом ЭКВИВАЛЕНТНСЮТЬ, ВХОДЫ которого сое динены с блоком формирования управляющего сигнала и выходе введенног частотно-импульсного компаратора, входы которого подключены к выходам задающего генератора и импульсного датчика частотам вращения, а выход элемента ЭКВИВАЛЕНТНОСТЬ подключен к управляющей цепи введенного ключа один силовой электрод которого вклю чен между выходов преобразователя частота скольжения - напряженке и вторым входом астатического регулятора частоты скольжения, а второй силовой электрод заземлен. 1 На чертеже представлена схема усггройства для управления асинхронным электродвигателем. Устройство для управления частотой напряжения асинхронным злектродвигателем содержит астатический регулятор 1 частоты скольжения, ко входам которого подключен источник 2 управляющего сигнала и выход преобразователя 3 частота скольжения напряжение, вход которого соединен с выходом импульсного .вычитателя частот 4. К одному из входов импульсного вычитателя частоты 4 подключен выход задающего генератора 5, а к другому - выход импульсногоДатчика б частоты вращения. Выход датчика 6 подключен также к входу преобразователя 7 частота вргицения - напряжение и ко входу частотно-импульсного компаратора 8, другой вход которого соединен с выходом задающего генератора 5. Выход преобразователя 7 подключен к одному из входов сумма- , тора 9, выход которого соединен с входом задающего генератора 5. Шлход частотно-импульсного компаратора В подключен к одному из входов логического элемента 10 ЭКВИВАЛЕНТНОСТЬ, к другому входу которого подключен блок 11 формирования управляющего сигнала. Выход элемента 10 соединен с управляющим входом ключа 12, один силовой электрод которого подключен ко второму входу регулятора 1 и выходу преобразователя 3, а второй силовой электрод заземлен. Между выходом регулятора 1 и другим входом сумматора 9 включен двухполупериодный амплитудный модулятор 13, управляющий вход которого соединенс блоком 11 формирования управляющего сигнала. Устройство работает следующим образом. В исходном состоянии задан тяговый режим (логическая на выходе блока 11). Астатический регулятор 1 поддерживает заданное источником управляющего сигнала 2 абсолютное скольжение (|Ь) асинхронного электродвигателя. Обратная связь по |Ь формируется как сигнал, пропорциональный модулю разности частоты тока статора (fc-r) и угловой частоты вращения ротора (f) асинхронного электродвигателя (АД): ии K,.K.( - ц). где иро - сигнал обратной связи по (i ; Р - число пар полюсов АД; К коэффициент передачи преобразователя 3; Kji - кратность частоты выходного сигнала импульсного датчика частоты вращения 6 по отношению к f ст (К 1 1) . Выходной сигнал астатического регулятора 1 через модулятор 13 поступает на йход сумматора 9. в рассматриваемом случае полярность этого сигнала соответствует, полярности выходногосигнала преобразователя 7 .частота вращения - напряжение (сигнал с выхода регулятора 1 проходит через модулятор 13 без измененияполярности). При этом на выходе сумматора 9 формируется сигнал (Ua - UpoJKa + , (2 UfciXfr и.ш, выходной сигнал суммато ра 9; к| - коэффициент усиления ре гулятора; Uf - выходной сигнал преобразователя частота вращения напряжение. Под действием этого сигнала на выходе задающего генератора 5 формируются сигналы частотой ст fJ + где fg - частота скольжения ротора, поступающие в систему упра1вления силового тиристорного преобразователя частоты и задающие частоту тока статора асинхронного электродвигателя, а также выходной г ст - --. сигнал частоты задающего генератора, используемый для выделения действительного значения | и его знака и поступающий в импульсный вычитатель частот 4 и в частотно-импульсный компаратор 8. На выходе импульсного вычитателя частот 4 формируется сигнал, частота которого определяется модулем разности частот и f, а затем преобразуется в аналоговый сигнал в преобразователе 3. На выходе частотноимпульсного компаратора 8 формирует ся логический сигнал Ч в случае если vu (двигггтельный режим) . и логический сигнал О, если fw (геторный режим). В рассматриваемом случае (двигательный режим) на выхо де компаратора 8 формируется логическая . Наличие логических на входах логического элемент ЭКВИВАЛЕНТНОСТЬ Ю вызывает на .его выходе логическую , при этом ключ 12 разомкнут и не влияет на работу регулятора 1. В случае, если из-за перерегулирования в переходных режимах, вызванных внешними возмущающими воздействиями, изменилась полярность сигнала на выходе регулятора 1 и, как следствие этого, знак действительного значения (Ь асинхронного электродвигателя (неуправляемый переход электродвигател в генераторный режим), на выходе компаратора 8 формируется .огически О , что вызывает появление на втором входе элемента ЭКВИВАЛЕНТНОС 10 логического при нали.чии на первом входе, формирование логического О на выходе элемента 10, зси«лкание ключа 13 и отключе ние обратной связи по fb . При этом напряжение на выходе регулятора 1 увеличивается, заданный двигательны режим двигателя восстанавливается, и ключ 12 размыкается, восстанавливая обратную связь по ft , что позво ляет увеличить диапазон регулирован (, повысить коэффициент усиления и быстродействия регулятора по сравнению с H3BecTHbnvi устройством. Для перевода асинхронного электродвигатели из двигательного-в генераторный режим формируется логичер- . кий 0 на выходе блока Ц, что вызывает изменение полярности сигнала на выходе модулятора 13. При этом сигнал на выходе сумматора 9 равен и выхе -(у у - up) к 3 + Uj, (4) электродвигатель переводится в генераторный режим( - f ш) и поддерживается в этом режиме с заданным значением /J . Для управляемого перевода асинхронного электродвигателя I из генераторного режима в двигательный формируется логическая i на выходе блока 11, что вызывает изменение полярности сигнала на выходе модулятора 13. При этом сигнал на выходе сумматора соответствует выражению (3), и электродвигатель, возвра-, щается в двигательный режим {- feu) и поддерживается в этом режиме с заданным значением Ь . Введенные в устройство узлы.(модулятор 13, частотно-импульсный компаратор 8, элемент ЭКВИВДГЕЕНТНОСТЬ 10, ключ 12) легко реализуется на аналоговых и цифровых интегральных микроскопах и существенно не влияют на его габариты и вес. Таким образом, введение в устройство двухполупериодного модулятора, включенного между выхбдом регулятора частоты скольжения и выходом сумтлатора и управляемого от источника логического управляемого сигнала, логического элемента ЭКВИВАЛЕНТНОСТЬ, частотно-импульсного компаратора и управляемого ключа, один силовой электрод которого подключен к выходу преобразователя Частота скольжения - напряжение и ко .второму входу . ас.татического регулятора частоты скольжения, а второй силовой электрод заземлен земляной точкой, и позволяет реализовать управляемый генераторный, режим электродвигателя, повысить быстродействие контура регулирования, уменьшить статическую и динамическую ошибки регулирования и, как следствие этого, улучшить качество регулирования частоты напряжения асинхронного электродвигателя, осуществить рекуперативное торможение электропривода. изобретения Устройство для управления асинхронным электродвигателем, содержарее импульсный датчик частоты врацения, подключенный через преобразо
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для частотного управления тяговым асинхронным электродвигателем | 1980 |
|
SU877768A1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| Устройство для управления частотой вращения ротора асинхронного электродвигателя | 1984 |
|
SU1277343A1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления (его варианты) | 1982 |
|
SU1164851A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2265950C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085019C1 |
| Частотно-регулируемый электропривод перемещения | 1987 |
|
SU1415392A1 |
| Частотно-управляемый тяговый электропривод | 1982 |
|
SU1072231A1 |
| Электропривод переменного тока | 1987 |
|
SU1529392A1 |
