I
Изобретение относится к асинхронным тяговым электроприводам, в частности к устройствам управления частотой тока статора асинхронных тяговых двигателей локомотива путем воздействия на систему управления преобразователей частоты, питающих тяговые двигатели.
Известно устройство управления частотой асинхронных тяговых двигателей, питаемых от индивидуальных преобразователей частоты и напряженип, содержащее блоки управления преобразователями, соединенные через узлы распределения импульсов, делители частоты и сумматоры с датчиками частоты ращения роторов асинхронных тяговых двигателей и с генератором абсолютного скольжения
ИОднако известное устройство позволяет получить мягкие, подобные -характеристикам дып ателей с последовательным возбужлением постоянного тока, тяговые характеристики. При этом асинхронные тяговые двигатели имеют склонность к разносному боксованию, что не позволяет им реализовать максимальные ; тяговые усилия.
Целью изобретения является повышение коэффициента использования сцепного веса локомотива.
Цель достигается тем, что сумматор выполнен многовходовым по числу двигателей, датчики частоты .вращения роторов которых подключены к его входам.
10
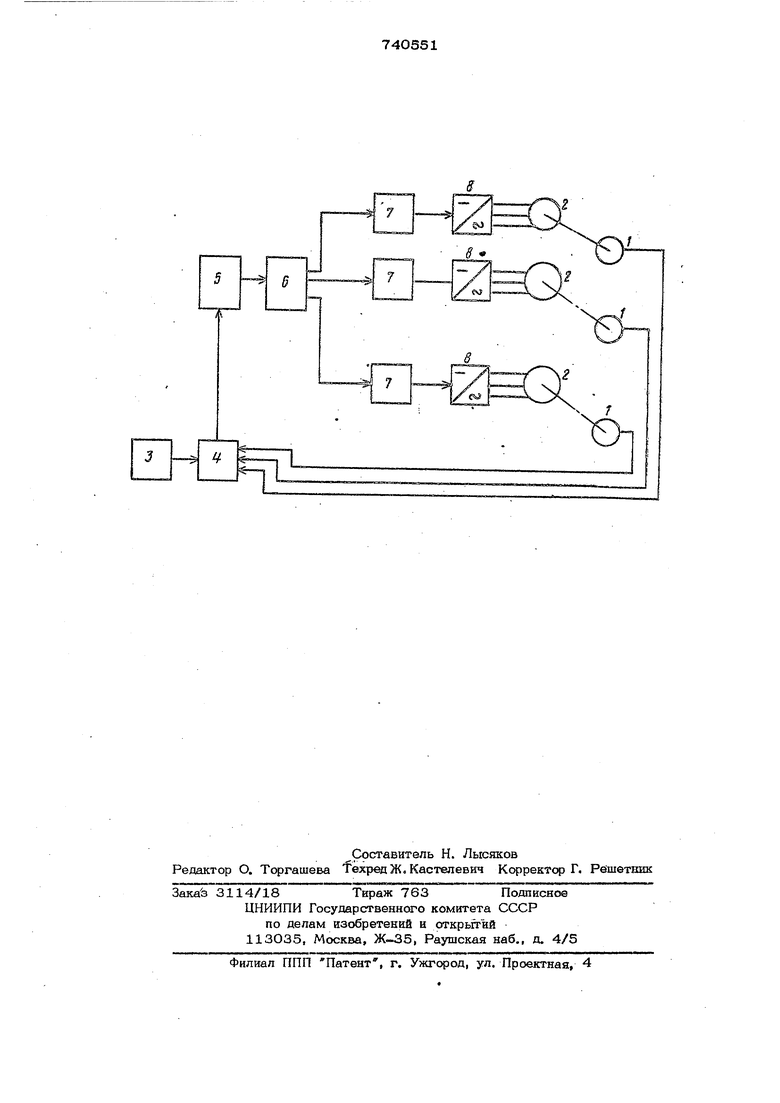
На чертеже представлена блок-схема предлагаемого устройства.
Устройство состоит из датчиков 1 частоты вращения роторов асинхронных тяговых двигателей 2 к генератора 3
15 абсолютного скольжения, соединенных своими вьрсодами с входами сумматора 4. Выход сумматора через делитель 5 частоты и узел 6 распределения импульсов соединен с входами блоков 7 трав20ления инверторами 8, питающими тяговые двигатели.
Устройство работает следующим образом. Сигналы с датчиков 1, пропорциональ Ные часяоте вращения ротора соответствующего /шигателя 2, поступают на вход сумматора 4, где суммируются меж ду собой и с сигналом от генератора 3 абсолютного скольжения . В результате на выходе сумматора появляется сигнал с частотой. ,Ь„, л ьр где 2 частота сигнала генератора абсолютного скольжения двигателя;K.fg частота сигнала датчика 1 частоты вращения ротора i двигателя; КиК - коэффициент, зависящий от коэффициента деления делителя частоты Ко , узла распределения импульсов Кур блока управления инвертором Kgyn и числа пар полюсов тягового двигателя Р, причем .. После прохождения сигнала через дел тель 5 частоты на входе узла распределения импульсов образуется сигнал с частотой К , . А n-l4,N4v-. Y-CJ Узлом.- распределения импульсов в за висимости от принятого алгоритма управ ления инверторами (синхронный синфазный или синхронный :несинфазный) осуществляется выборка импульсов, которые поступают на блок управления инвер торами с частотой К.г PW-K -%P, г V gSPWW В общем случае коэффициент деления К должен быть кратным числу двигателей N Сигнал с частотойfypи поступает на вход блока управления инвертором, в результате чего на выходе инвертора формируется переменное напряжение с частотой БУЮ N Таким образом, частота напряжения и тока статора асинхронного тягового двигателя равна сумме частоты скольжения 1 и средней частоты вращения роторов всех двигателей. Это позволяет увеличить жесткость тяговых характеристик отдельного тягового двигателя при сохранении мягких тяговых характеристик локомотива в целом. В случае боксования одной из колесных пар частота вращения ротора тш ового двигателя, связанного с этой Лолесной парой, увеличится на величину д fgpj . При этом частота тока статора этого двигателя увеличится только на величину , VN , а фактическая частота абсолютного скольжения боксующего двигателя уменьшится на величину . что соответствует работе двигателя на более жесткой характеристике |.UfjV , чем характеристика -$2 const Технике-экономическая эффективность изобретения заключается в увеличении жесткости тяговых характеристик локо мотива и повышение коэффициента использования сцепного веса локомотива на 15-20%. Формула изобретения Устройство управления частотой асинхронных тяговых двигателей локомотива, питаемых; от индивидуальных преобразователей частоты и напряжения, содержащее блоки управления преобразователями, соединенные через узлы распределения импульсов, делители частоты н сумматоры с датчиками частоты вращения роторов асинхронных тяговых двигателей и с генератором абсолютного скольхсения, отличающееся тем, что, с целью повышения коэффициента использования сцепного веса локомотива, сумматор выполнен многовходовым по числу двигателей, датчики частоты вращения роторов которых подключены к его входам. ИcтoнIiики ш формации, принятые во внимание при экспертизе 1. Аватков Е. С. и др. Мощный магистральный электровоз с асинхронными тяговыми двигателями и тиристорными преобразователями частоты, № 6, статья Электрическая и тепловозная тяга, Ns 6, М., Транспорт 197.1 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2007 |
|
RU2359400C2 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ ПОДВИЖНОГО СОСТАВА С ПИТАЕМЫМИ ОТ ИСТОЧНИКА ЧЕРЕЗ ПОЛУПРОВОДНИКОВУЮ ПРЕОБРАЗОВАТЕЛЬНУЮ УСТАНОВКУ ТРЕМЯ И БОЛЕЕ АСИНХРОННЫМИ ДВИГАТЕЛЯМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2092337C1 |
| Способ регулирования силы тяги локомотива с автономным источником питания | 1983 |
|
SU1093578A1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР И ПОДАВЛЕНИЯ ФРИКЦИОННЫХ АВТОКОЛЕБАНИЙ В КИНЕМАТИЧЕСКОЙ ЦЕПИ ПОДВИЖНОГО СОСТАВА С АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 2004 |
|
RU2270766C2 |
| Устройство для регулирования частоты статического преобразователя многодвигательного асинхронного тягового привода | 1981 |
|
SU1029367A2 |
| Устройство для управления многодвигательным приводом | 1978 |
|
SU1310992A1 |
| Устройство для регулирования частоты статического преобразователя многодвигательного асинхронного тягового электропривода | 1979 |
|
SU875571A1 |
| Устройство для управления частотой асинхронных тяговых двигателей | 1984 |
|
SU1241402A1 |
| Устройство для защиты от боксования транспортного средства с асинхронными двигателями | 1979 |
|
SU863435A1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ ЛОКОМОТИВА НА ПРЕДЕЛЕ ПО СЦЕПЛЕНИЮ КОЛЕС С РЕЛЬСАМИ | 2010 |
|
RU2446063C2 |