(54) СЛЕДЯЩАЯ СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО
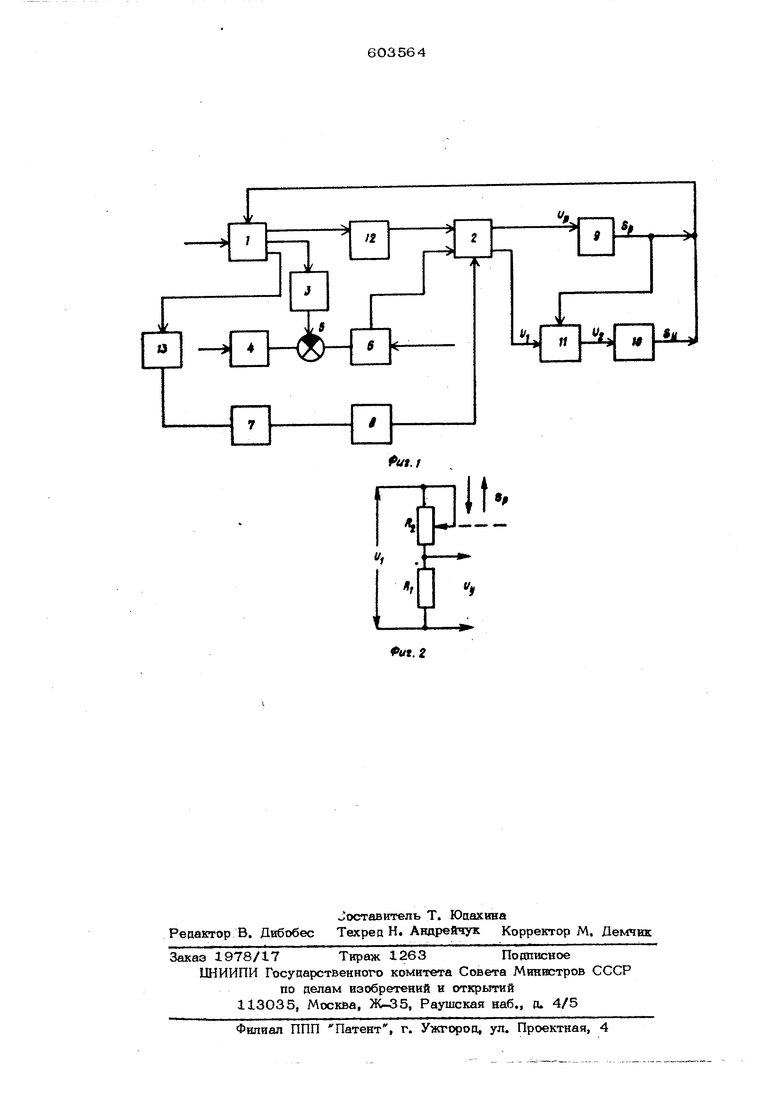
КОПИРОВАНИЯ ля 3, аадатчика 4 скорости, элемента 5 сравнения, модулятора 6, управляемого даигателя 7, редуктора 8 между выходным ва лом двигателя и осью ротора вращающегос трансформатора,привода 9, рацнальных пере мещений, привода 10 угловых перемещений функционального преобразователя 11, К аадатчику скорости подается задающее напряжение постоянного тока. Для согласованного выхода копировального прибора с управляемым двигателем и вращающимся трансформатором могут быть установлены усилители 12 и 13 мощности. Функциональный преобразователь (Лиг. 2 состоит из ред истора Т , являющегося выходом преобразователя и резистора | „ движок которого кинематически связан с приводо радиального перемещения. Напряжение и подается с СКВТ 2 (фиг. 1), Система работает следующим образом. Скорость копирования устанавливается задатчиком 1, При равенстве угла копирования (угла между касательной в точке копирования и тангенциальной составляющей вектора скорости копирования) углу, поворота ротора СКВТ 2 относительно задающей статорной обмотки якорь копировального прибора находится на своей оси, т,е, ощибк копирования равна нулю к на выходе КП сигнал отсутствует, а угловая и радиальная скорости определяются величиной напряжения на задающей статорной обмотке СКВТ 2 относительно этой обмотки, , соответственно величиной управляющих напряжений Up и 0 (фиг, 1), При появлении ошибки копирования (при отходе якоря КП 1 от среднего положения) на выходе прибора появляется напряжение, пропорциональное величине отклонения Л , которое поступает на вторую статорную обмотку СКТВ 2, В результате сложения сигналов задающего напряжения.и пропорционального ощибке Д реэулнгирующее напряжение на задающей об мотке СКВТ 2 уменьшается, а при еще большей величине Д меняет фазу на 180 эл, град. Одновременно сигнал, пропорциональный ошибке, подается на упра пяюЧцую обмотку двигателя 7, который поворачивает ротор СКВТ 2 в таком направлении, что результирующая скорость обеспечивает уменьшени ошибки слежения. По мере перемещения радиального при-.. вода 9 будет изменяться полярный радиус, но за счет кинематической связи движка регулируемого резистора Т (фит . 2) функционального преобразователя 11 одновремекно будет изменяться и сигнал управления приводом 10 угловых перемещенiiii так, что при увеличении полярного радиуса управляющий сигнал и V, будет уменьщат1ся, а при уменыиении радиуса - увеличиваться. Таким образом, в предлагаемой системе, кроме двухкааашдого слежения, компенсируется влияние на скорость копирования изменения величины полярного радиуса и тем самым стабилизируется скорость копирования независимо от изменения диаметра обрабатываемого изделия, В связи с изменением полярного радиуса тангенциальная составляющая вектора скорости копирования получает приращение, При этом изменяется модуль вектора скорости и его направление, что ведет к увеличению ощибки, При определенной конфигурации изделия скорость копирования может изменяться прямо пропорционально изменению полярного радиуса, а при обработке контуров с резко изменяющейся кривизной (типа прямой угол) скорость и ошибка могут изменяться в еще большей степени. Введение в систему функционального устройртва позволяет стабилизировать скорость копирования и уменьшить ошибку. Испытания предложенной системы на действующем макете показали, что скорость копирования при любой конфигурации изделия отличалась от заданной не более, чем на 1О%, а ошибка копирования имела те же значения, что и при обработке изделий в прямоугольных координатах. Формула изобретения Следящая система для автоматического копирования по авт, ев, № 395234, отличающаяся тем, что, с целью увеличения скорости и точности копирования, в систему введен функциональный преобразователь, подключенный к выходу СИ:нусно-косикусного трансформатора и выполненный в виде двух последовательно включенных нерегулируемого и регулируемого резисторов, причем движок регулируемого резистора кинематически связан с приводом радиальных перемещений, а нерегулируемый резистор подключен на вход исполнительного привода у1 ловых перемещений. Источники информации,принятые во внимание при экспертизе: 1, Авторское свидетельство СССР Ч 395234, кл, В 23 Q 35/12, 1971,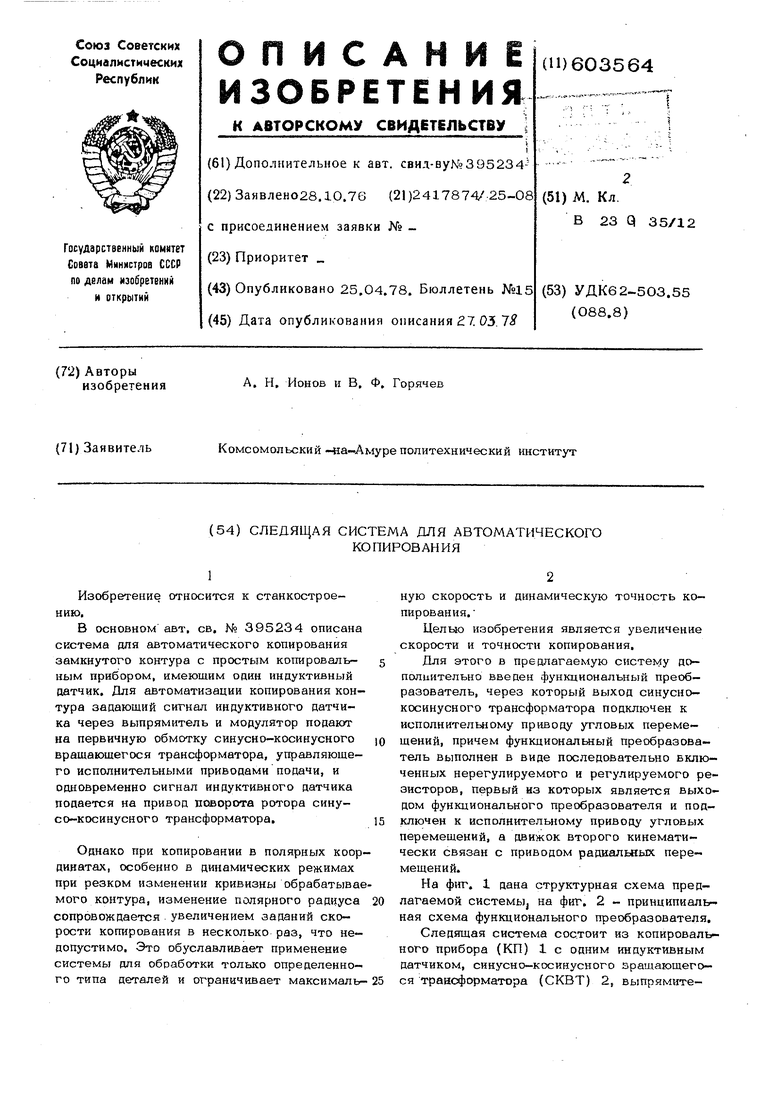
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО КОПИРОВАНИЯ | 1973 |
|
SU395234A1 |
| Устройство для управления металлорежущим станком | 1978 |
|
SU746421A1 |
| Система программного управления металлорежущими станками | 1961 |
|
SU147421A1 |
| СИСТЕМА УПРАВЛЕНИЯ КОПИРОВАЛЬНЫМ СТАНКОМ | 1973 |
|
SU377727A1 |
| Преобразователь зенитного угла | 1981 |
|
SU1008431A1 |
| Устройство для воспроизведения экстремальных характеристик | 1976 |
|
SU611220A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| Способ индикации дисбаланса ротора и устройство для осуществления способа | 1976 |
|
SU605140A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ДУГОВОЙ СВАРКИ КРИВОЛИНЕЙНЫХ ПОВОРОТНЫХ ИЗДЕЛИЙ | 1967 |
|
SU200082A1 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |