1
Изобретение относится к области автоматического регулирования.
Известны способы формирования корректирующего сигнала для систем автоматического регулирования, по которым входной сигнал, например сигнал рассогласование, ограничивают по модулю и дифференцируют.
Однако при значительном уровне начального рассогласования наблюдается существенно вре1дное влияние ограниченной мощности исполнительного устройства на динамические свойства систем автоматического регулирования.
Предлагаемый способ отличается тем, что продифферениирова,нный сигнал складывают с его частью, предварительно :вы,прямленной и имеющей знак производной второго порядка от входного сигнала.
Это позволяет ослабить вредное ;влия11ие ограниченной мощности исполнительных устройств на динамические свойства систем.
Па фиг. 1 представотвна блок-схема корректирующего устройства, реализующего предложенный способ; па фиг. 2а и б - элюры сигналов на выходе элементов корректирующего устройства.
Корректируюндее устройство содержит дифференцируюндий контур 1 первого -порядка, нелинейное зве1но 2 с характеристикой типа насыщение, дифференцирующий контур 3
второго порядка, сумматор 4, сглаживающий выпрямитель 5 и формирователь 6 знака.
При формировании управляющего сигнала 1ПО предложенному способу исходный сигнал
перед дифференцированием ограничивают по величине с помощью нелинейного звена 2. Это .приводит к уменьшению перегрузки исполнительного устройства нри больших уровнях входного сигнала (начального рассогласования), а следовательно, и величины фазового запаздывания, вносимого исполнительным устройством.
При ограничении уровня исходного сигнала фазовое опережение, создаваемое дифференцирующим контуром 1, уменьшается с увеличением уровня начального рассогласования системы. Это объясняется тем, что при увеличении уровня начального рассогласования системы нроисходит увеличение интервалов времени, в течение которых сигнал л1,-на входе контура 1 постоянен по величине (равен уровню органичения нелинейного звена 2). Производная же от ностоянной велнчины равна нулю. В итоге тюложительньп эффект, обусловленный уменьшением перегрузки иснолнительного механнзма, в данном случае почти полностью нейтрализуется вредным влиянием ограничения исходного снгпалп на величину эквивалентного фазоопереженпя, создаваемого контуром 3. В связи с этим, примепенне
одного лишь этого шриема в целом не приводит к расширению области устотшвости системы по уровню начального рассогласования.
Для ослабления вредного влияния ограничения исходного сигнала на фазные соотношения в системе формируется и алгебраически суммируется с рассмотренным сигналом Xz дополнительный сигнал лз, знак которого определяется второй производной исходного сигнала, а величина-пропорциональна выпрямленному и сглаженноМу сигналу Xz. Введение в управляющий сигнал этой составляющей позволяет создать в канале регулирования необходимое фазоопережение -как при малых, так и при больших уровнях начального рассогласования. Вместе с этим положительный эффект от ограничения в данном случае сохраняется, так «ак величина этой составляющей также Получается ограниченной.
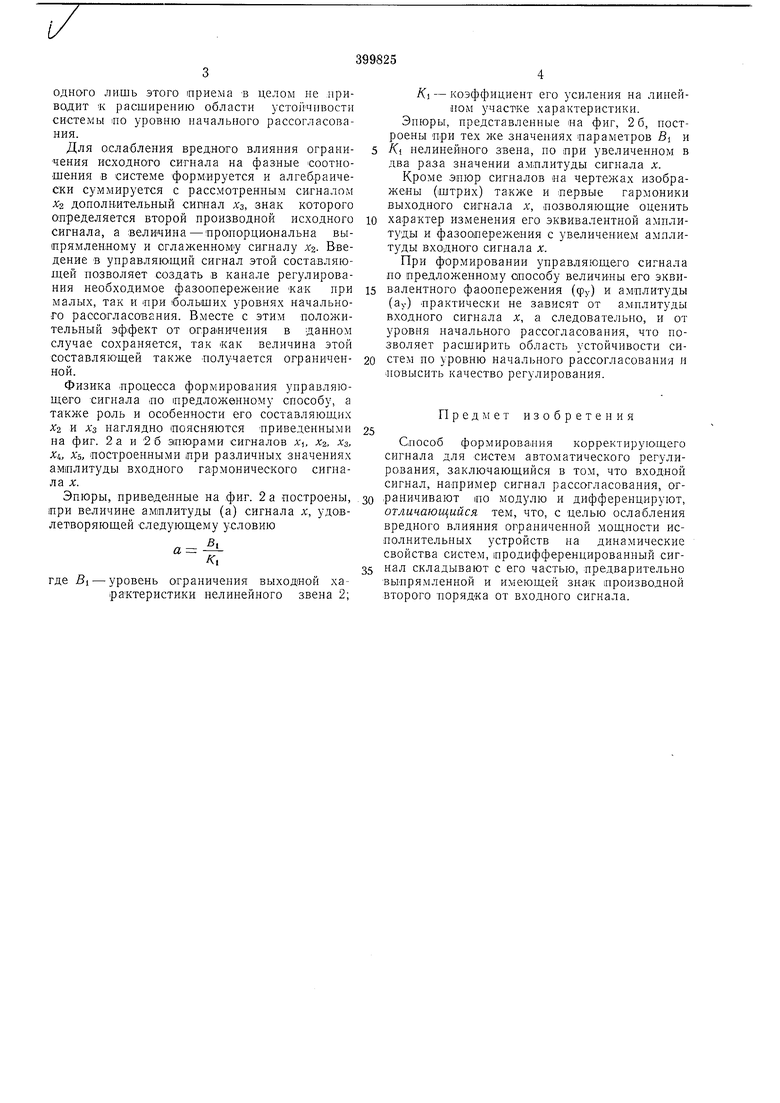
Физика процесса формирования управляющего сигнала по предложенному способу, а также роль и особенности его составляющих Xz и Аз наглядно поясняются приведенными на фиг. 2 а и 2 б эпюрами сигналов Xi, xz, х, Xi,, л-б, построенными при различных значениях амплитуды входного гармонического сигнала X.
Эпюры, приведенные на фиг. 2 а построены, при величине амплитуды (а) сигнала х, удовлетворяющей следующему условию
В,
где Bi - уровень ограничения выходной характеристики нелинейного звена 2;
/С) - коэффициент его усиления на линейiioM участке характеристики. Эпюры, представленные па фиг, 26, построены при тех же значениях параметров fii и /Ci нелинейного звена, по при увеличенном в два раза значении амплитуды сигнала х.
Кроме эпюр сигналов на чертежах изображены (штрих) также и первые гармоники выходного сигнала х, позволяющие оценить характер изменения его эквивалентной амплитуды и фазоопережения с увеличением амплитуды входного сигнала х.
При формировании управляющего сигнала по предложенному способу величины его эквивалентного фаоопережепия (фу) и амплитуды (ау) практически не зависят от амплитуды входного сигнала х, а следовательно, и от уровня начального рассогласования, что позволяет расширить область устойчивости систем по уровню начального рассогласования и повысить качество регулирования.
Предмет изобретения
Способ формировапия корректирую щего сигнала для систем автоматического регулирования, заключающийся в том, что входной сигнал, например сигнал рассогласования, ограничивают по модулю и дифференцируют, отличающийся тем, что, с целью ослабления вредного влияния ограниченной мощности исполнительных устройств на динамические свойства систем, продифференцированный сигнал складывают с его частью, предварительно выпрямленной и имеющей знак производной второго порядка от входного сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для слежения за информационной дорожкой носителя оптической записи | 1985 |
|
SU1265843A1 |
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1971 |
|
SU307394A1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1992 |
|
RU2092784C1 |
| КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1971 |
|
SU310226A1 |
| РЕЛЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2033988C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2138767C1 |
| Следящая система | 1985 |
|
SU1325402A1 |
| Следящий пъезопривод с коррекцией неоднозначной статической характеристики | 1982 |
|
SU1120279A1 |

XJ
Фи&.1
--t
(a fa
Фиг 7.5
