113
Изобретение относится к области автоматического регулирования н може быть -использовано в автоматических следящих системах повышенной точности, требующих оптимальных по быстро действию переходных процессов, например, в радиолокационных сис,темах слежения за целью, в системах автоматического управления
движением судна в режиме маневрирования, в системах слежения за положением в робототехнических системах, а также может найти применение при построении быстродействующих систем широкого профиля.
Цель изобретения - повышение точности.
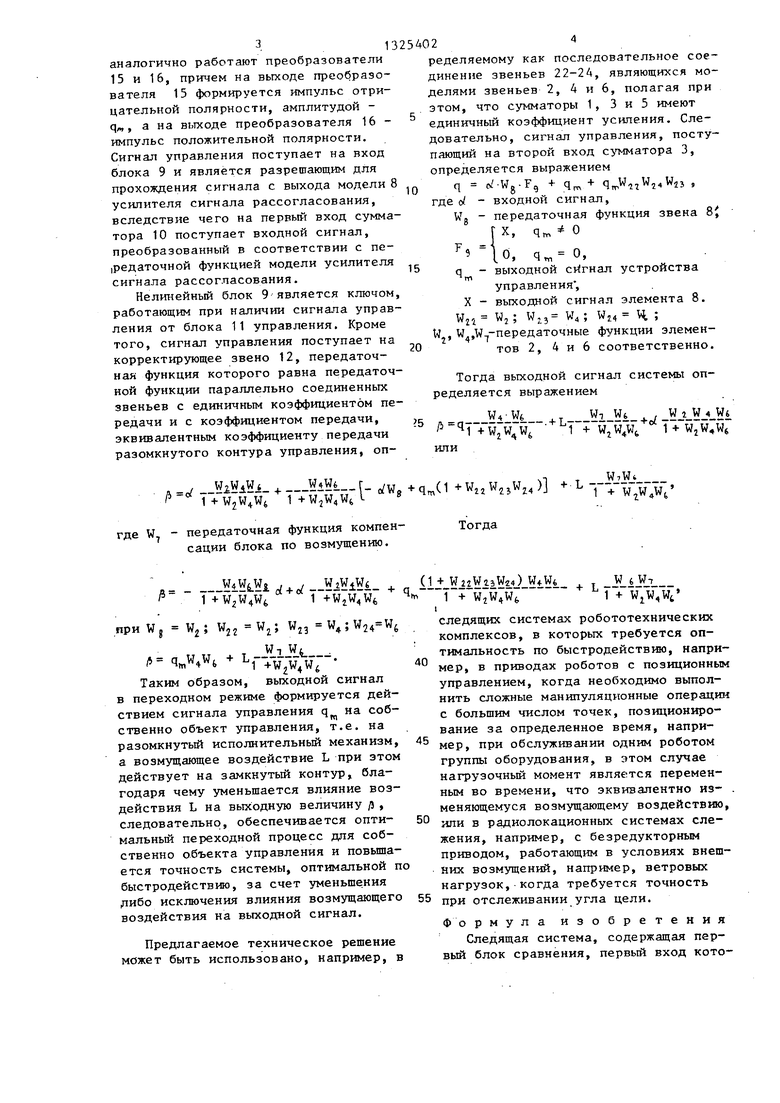
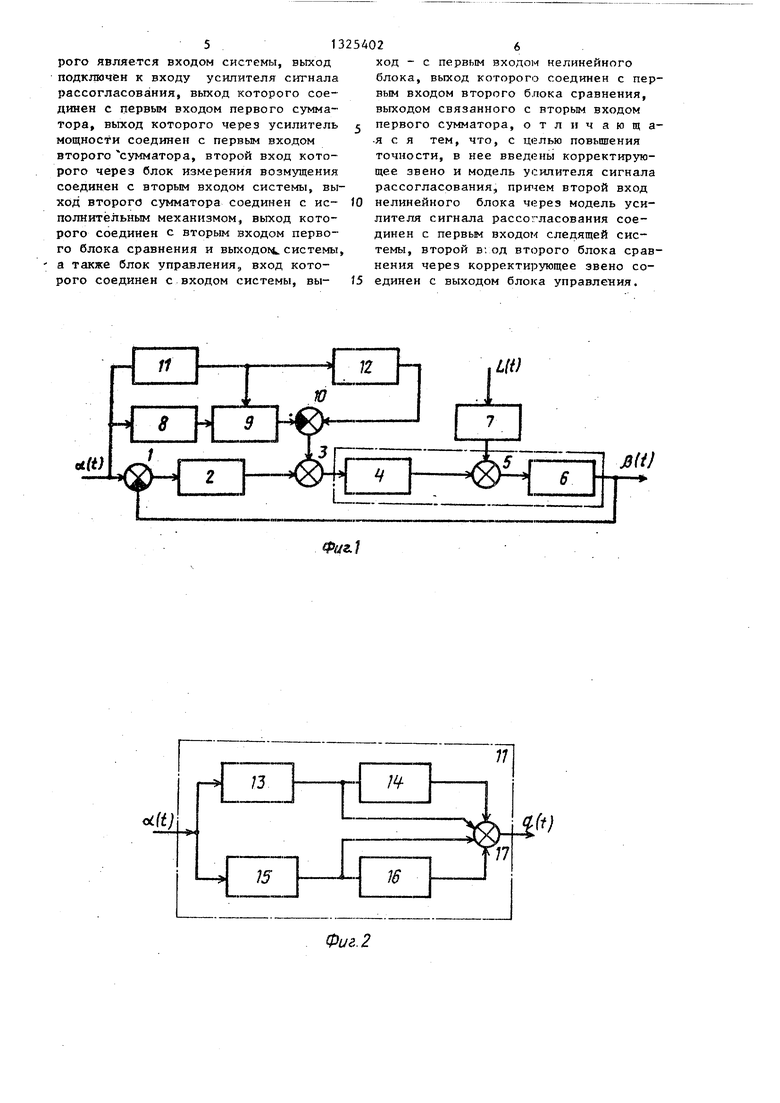
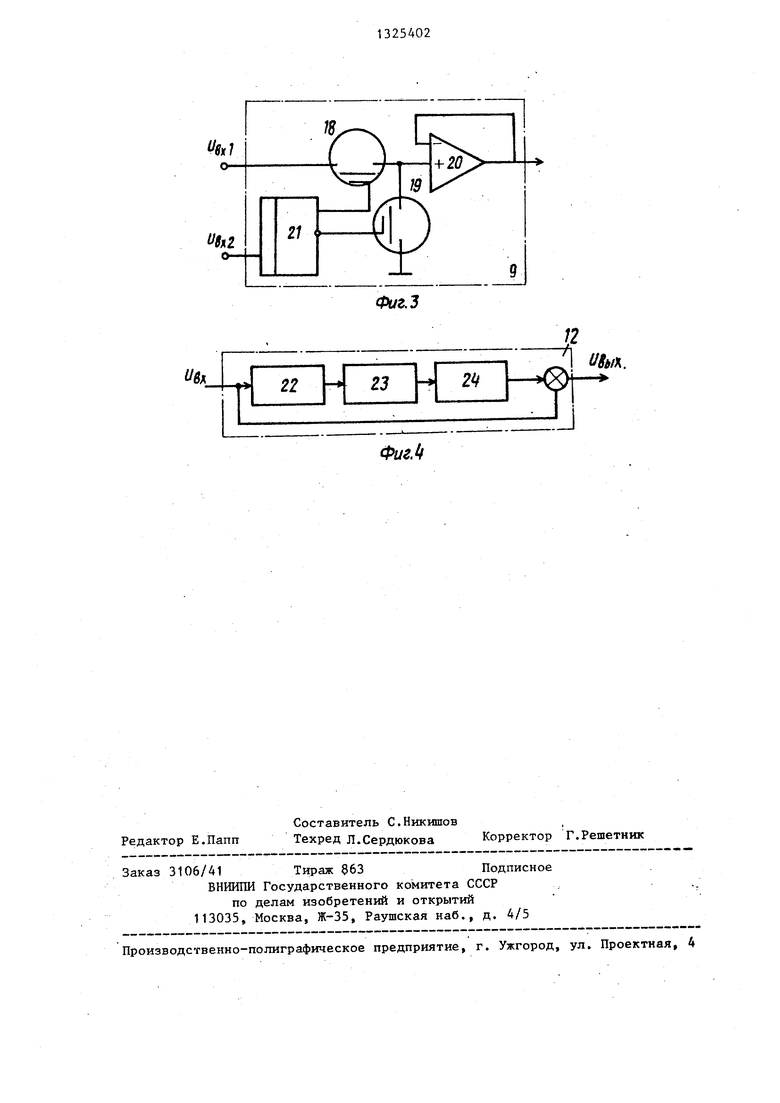
На фиг.1 представлена блок-схема следящей системы; на фиг. 2 - блoк- . схема блока управления на фиг.З и4- блок-схемы блока нелинейности и корректирующего звена.
Следящая система содержит первый блок 1 сравнения, усилитель 2 сигнала рассогласования, первый сумматор 3, усилитель 4 мощностиf второй сумматор 5, исполнительный механизм 6, блок 7 измерения возм1,тцения, модель 8 ус тителя сигнала рассогласования, нелинейный, блок 9, второй блок 10 сравнения, блок 11 управления, корректирующее звено 12.
Блок 11 управления включает преобразователи 13-16 aмплитyд J в длительность импульса и сумматор 17. Блок келинейности (фиг.З) включает транзисторы 18 и 19, работающие в pemjiMe ключа, операционный усилитель 20j работающий в режиме повторителя, триггер 21.
Корректирующее звено (фиг.4) .включает параллельно-последовательное соединение единичной связи и звеньев 22-24, являющихся моделями звеньев 2, 4 и 6.
Модель усилителя сигнала рассогла- совангад представляет собой динам1таес- кое звено, воспроизводящее физтгеский процесс, аналогичный с точки зрения динамики системы процессу, происходящему в усилителе 2 сигнала рассогласования, и описываемый передаточной функцией усилителя сигнала рассогласования.
Блок 3 компенсации возмущения представляет собой пропорциональное звено, с передаточной функцией К..
W - К,е
- коэффрщиент наклона механической характеристики дзига теля ,
коэффициент передачи исполнительного двигателя.
10
к - Н.- МГ где Я у. - скорость холостого хода двигателя,5
0
5
0
0
5
М.
5
- пусковой момент двигателя.
Следящая система работает следующим образом.
Задающее воздействие поступает на первый вход системы - первый вход блока 1 сравнения, где сравнивается с выходом системы - выходом исполнительного механизма 6. Результат - ошибка следящей системы - поступает через усилитель 2 сигнала рассогласования, сумматор 3, усилитель vi мощности, сумматор 5 на управление исполнительным механизмом 6. По второму входу на систему действует возмущающее воздействие, которое через блок 7 измерения возмущения, отражающий оператор связи по возмущающему воздействию, поступает на второй вход сум-г матора 5. В момент приложения ступенчатого входного воздействия по первому входу системы на выходе блока 11 управления формируется сигнал управления, представляющий собой последовательность импульсов, количество которых определяется порядком системы и наложенными ограничителями, а длительность определяется настройкой преобразователей и является пропорциональной величине входного сигнала.
Блок управления работает следующим образом.
При поступлении положительного ска.чкообразного входного сигнала на преобразователе 13 появляется импульс положительной полярности амплитудой q, длительностью, определяемой пара- g метрами настройки л пропорциональной
величине входного сигнала , по окон- чании этого импульса начинается пре-- образование положительного входного сигнала в импульс отрицательной по- g лярности, амплитудой q и длительностью, определяемой параметрами настройки и пропорциональной величине входного сигнала. При поступлении отрицательного скачкообразного сигнала
аналогично работают преобразователи 15 и 16, причем на выходе преобразователя 15 формируется импульс отрицательной полярности, амплитудой - q«, а на вьгходе преобразователя 16 - импульс положительной полярности, Сигнал управления поступает на вход блока 9 и является разрешающим для прохождения сигнала с выхода модели 8 усилителя сигнала рассогласования, вследствие чего на первый вход сумматора 10 поступает входной сигнал, преобразованный в соответствии с пе- |редаточной функцией модели усилителя сигнала рассогласования.
Нелинейный блок 9 является ключом работающим при наличии сигнала управления от блока 11 управления. Кроме того, сигнал управления поступает на корректирующее звено 12, передаточная функция которого равна передаточной функции параллельно соединенных звеньев с единичным коэффициентом передачи и с коэффициентом передачи, эквивалентным коэффициенту передачи разомкнутого контура управления, оп
WiWt
- гЖгTvlf . «...« -4-vt1ir.w
где W - передаточная функция компенсации блока по возмущению.
W4. , . , W iWiWt
/ 1 +W2W4Wt 1 -bWiW wr при Wj W22 Wj; Wj3
, -b .
Таким образом, выходной сигнал в переходном режиме формируется действием сигнала управления q на собственно объект управления, т.е. на разомкнутый исполнительный механизм, а возмущающее воздействие L при этом действует на замкнутый контур, благодаря чему уменьщается влияние воздействия L на выходную величину /5 , следовательно, обеспечивается опти- мальный переходной процесс для собственно объекта управления и повышается точность системы, оптимальной п быстродействию, за счет уменьше.ния дибо исключения влияния возмущающего воздействия на выходной сигнал.
Предлагаемое техническое рещение может быть использовано, например, в
ределяемому как последовательное соединение звеньев 22-24, являющихся моделями звеньев 2, 4 и 6, полагая при этом, что сумматоры 1, 3 и 5 имеют единичный коэффициент усиления. Следовательно, сигнал управления, поступающий на второй вход сумматора 3, определяется выражением
q c/-Wg-Fg + q + ,,Wjj , где о/ - входной сигнал,
Wg - передаточная функция звена 8 X, Яп,0
16, q О,
q - выходной сигнал устройства ш
управления,
X - выходной сигнал элемента 8. Wri Wj; W,3 V,; W Ч ; W , W,W-J-пepeдaтoчныe функции элементов 2, 4 и 6 соответственно.
Тогда выходной сигнал системы определяется выражением
WT W6 W
1 + WjW4Wt 1 «-Wj w7Wi или
WiWt
«...« -4-vt1ir.w
Тогда
(1
+ Wj2WliW2.,)W4.W4.
Т
следящих системах робототехнических комплексов, в которых требуется оптимальность по быстродействию, например, в приводах роботов с позиционным управлением, когда необходимо выполнить сложные манипуляционные операции с большим числом точек, позиционирование за определенное время, например, при обслуживании одним роботом группы оборудования, в этом случае нагрузочный момент является переменным во времени, что эквивалентно из- меняющемуся возмущающему воздействию, или в радиолокационных системах слежения, например, с безредукторным приводом, работающим в условиях внешних возмущений, например, ветровых нагрузок,когда требуется точность при отслеживании угла цели.
Ф о рмула изобретения Следящая система, содержащая первый блок сравнения, первый вход которого является входом системы, выход подключен к входу усилителя сигнала рассогласования, выход которого соединен с первым входом первого сумматора, выход которого через усилитель мощности соединен с первым входом второго сумматора, второй вход которого через блок измерения возмущения соединен с вторым входом системы, выход второго сумматора соединен с исполнительным механизмом, выход которого соединен с вторым входом первого блока сравнения и выходом, системы а также блок управления, вход которого соединен с входом системы, вы
ход - с первым входом нелинейного блока, выход которого соединен с пер- входом второго блока сравнения, выходом связанного с вторым входом первого сумматора, отлич ающа- -я с я тем, что, с целью повьппения точности, в нее введены корректирующее звено и модель усилителя сигнала рассогласования,, второй вход нелинейного блока через модель усилителя сигнала рассогласования соединен с первьм входом следящей системы, второй в; од второго блока сравнения через корректирующее звено соединен с выходом блока управления.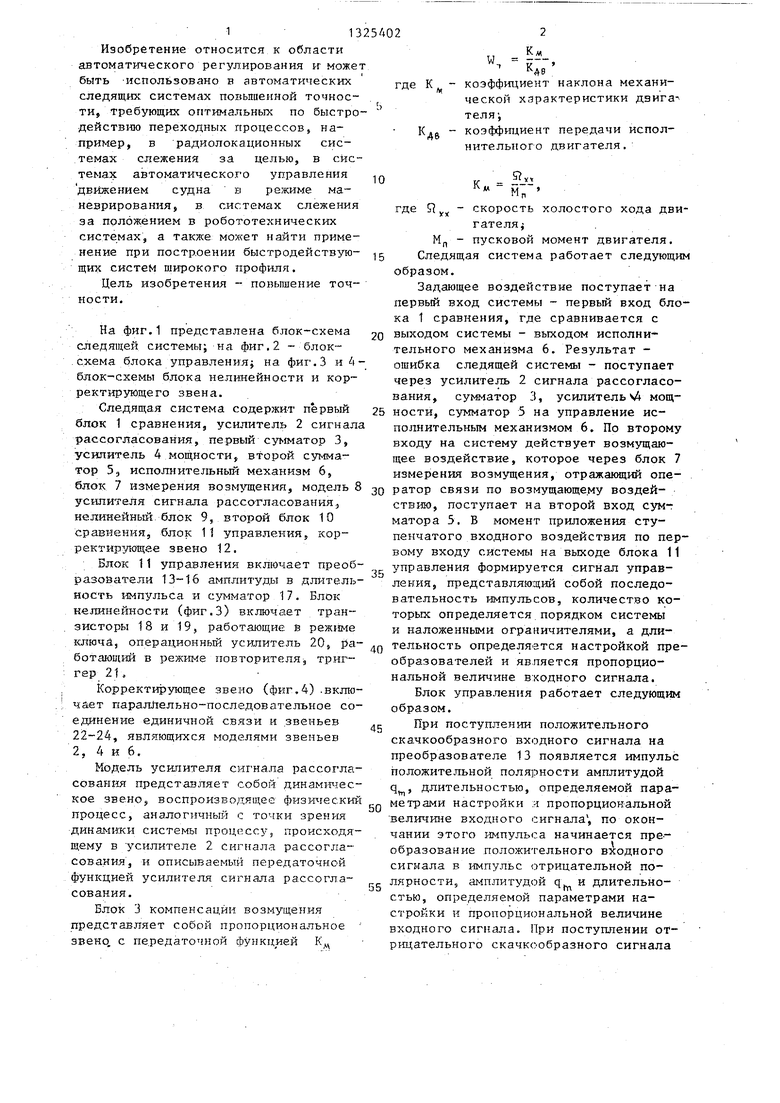
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Нелинейная следящая система | 1989 |
|
SU1615672A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| Следящая система | 1975 |
|
SU550617A1 |
| Система управления для объектов с запаздыванием | 1982 |
|
SU1051502A1 |
| Электрогидравлический следящий привод | 1987 |
|
SU1432280A2 |
| Система автоматического управления нестационарным объектом | 1986 |
|
SU1409967A1 |
| Следящая система | 1977 |
|
SU714351A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
Изобретение относится к автоматическому управлению и регулированию и может быть использовано при проектировании следящих систем, требукидих оптимрльных по быстродействию переход ных процессов при наличии возмущающих воздействий. Целью изобретения является повышение точности. Для этого в систему включены модель усилителя сигнала рассогласования и корректирующее звено. Введение корректирующего звена, коэффициент передачи которого равен сумме единичного коэффициента передачи модели разомкнутой системы, вход которого соединен с выходом устройства управления, а выход - с вторым входом третьего алгебраического сумматора, позволяет преобразовать сигнал управления, поступающий с устройства управления, так, что действие нулей передаточной функции корректирующего звена компенсирует действие полюсов передаточной функции замкнутой системы, тем самым обеспечивая действие сигнала управления на собственно объект управления. Причем введенная модель усилителя сигнала рассогласования, вход которой; соединен с входом системы, а выход - с первым входом нелинейного звена, позволяет сформировать на выходе нелинейного элемента сигнал, равный сое-, тавляющей ошибки от величины задающего воздействия, но противоположный по знаку, а значит компенсировать на выходе первого сумматора действие величины задающего воздействия на величину сигнала управления. Благодаря этому размыкание контура следящей системы происходит на сигнал управления, влияние задающего воздействия на сигнал управления устраняется, а возмущающее воздействие.при этом действует на замкнутый контур, благодаря чему повышается точность. 4 ил. (П ел
(t)
Фиг. 2
%;
Фиг.З
%
Л/д.
Редактор Е.Папп
Составитель С.Никишов Техред Л.Сердюкова
Заказ 3106/41 Тираж 363Подписное
ВНИИПИ Государственного комитета СССР ,,
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг.
Корректор Г.Решетник
| Зайцев Г.Ф., Стеклов В.К | |||
| Квазиоптимальные следящие системы.- Киев: Вища школа, 1981, с | |||
| Говорящий кинематограф | 1920 |
|
SU111A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Там же, с | |||
| Ударно-вращательная врубовая машина | 1922 |
|
SU126A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Бесекерский В.А., Пальтов И.П | |||
| и др | |||
| Сборник задач по теории..., с | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
