Предлагаемое устройство может найти применение как фильтр-смеситель, выделяющий отфильтрованный полезный сигнал средней частоты, когда в системе одновременно могут быть использованы входные сигналы, являющиеся суммой полезного сигнала с высокочастотной помехой и полезного сигнала с низкочастотной помехой. Примерами таких комбинаций входных сигналов могут являться, с одной стороны, сигналы радиотехнических, астрономических датчиков и их производные, с другой стороны, сигналы гироскопических инерциальных, барометрических устройств в авиационных системах автоматической навигации и пилотирования.
Известны фильтры-смесители для сигналов, один из которых содержит высокочастотную, а другой низкочастотную помехи, содержащие замкнутый контур с нелинейным и двумя суммирующими элементами, к одному из которых подключен источник управляющего сигнала, содержащий высокочастотную помеху, а к другому суммирующему элементу через дифференцирующий элемент подключен источник управляющего сигнала, содержащий низкочастотную помеху.
Предлагаемое устройство отличается от известных тем, что замкнутый контур выполнен в виде последовательно соединенных суммирующих элементов с включенным между ними нелинейным элементом типа сигнатуры и интегрирующего элемента, охваченных л есткой обратной связью, что позволяет упростить схемную реализацию устройства.
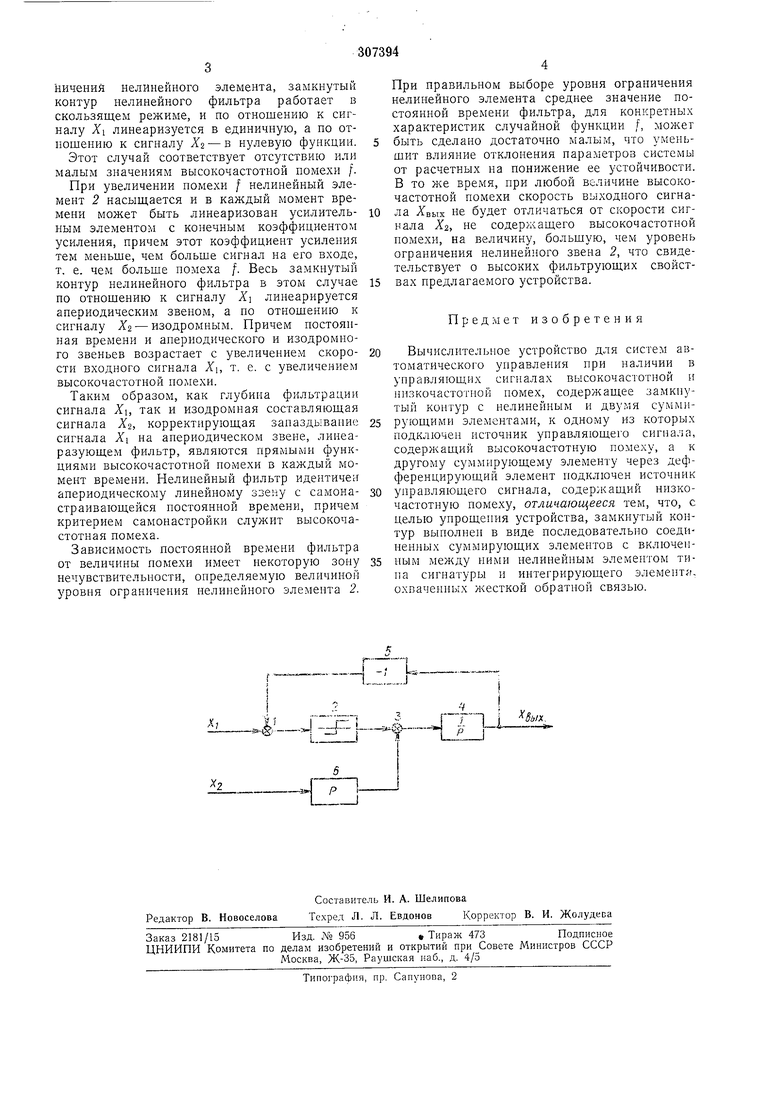
На чертеже представлена блок-схема предлагаемого устройства.
Сигнал Xi от источника управляющего сигнала, содержащего высокочастотную помеху (на чертеже не показан, поступает на вход замкнутого контура, состоящего в прямой цепи из суммирующего элемента 1, нелинейного элемента 2 типа сигнатуры, второго суммирующего элемента 3 и интегрирующего элемента 4, а ъ цепи обратной связи - из инвертирующего элемента 5. Ко второму входу элемента 3 через дифференцирующее звено 6 подключен источник управляющего сигнала Х2, содержащего низкочастотную помеху (на чертеже не показан).
При этом .je3H.-{-f, Xz Хао.-1езн. + Р,
где Хполезн. - полезный сигнал;
/ - высокочастотная помеха; F - низкочасготная помеха.
Предлагаемое устройство работает следующим образом.
ничения нелинейного элемента, замкнутый контур нелинейного фильтра работает в скользящем режиме, и по отношению к сигналу Xi линеаризуется в единичную, а по отношению к сигналу Xz - в нулевую функции.
Этот случай соответствует отсутствию или малым значениям высокочастотной иомехи f.
При увеличении помехи / нелинейный элемент 2 насыщается и в каждый момент времени может быть линеаризован усилительным элементом с конечным коэффициентом усиления, причем этот коэффициент усиления тем меньше, чем больше сигнал на его входе, т. е. чем больше помеха /. Весь замкнутый контур нелинейного фильтра в этом случае по отношению к сигналу X линеарируется апериодическим звеном, а но отношению к сигналу Xz - изодромным. Причем постоянная времени и анериодического и изодромного звеньев возрастает с увеличением скорости входного сигнала Xi, т. е. с увеличением высокочастотной помехи.
Таким образом, как глубина фильтрации сигнала Xi, так и изодромная составляющая сигнала Х, корректирующая запаздывание сигнала Xi на апериодическом звене, линеаразующем фильтр, являются прямыми функциями высокочастотной помехи в каждый момент времени. Нелинейный фильтр идентичен апериодическому линейному ззену с самонастраивающейся ностоянной времени, причем критерием самонастройки служит высокочастотная помеха.
Зависимость постоянной времени фильтра от величины помехи имеет некоторую зону нечувствительности, определяемую величиной уровня ограничения нелинейного элемента 2.
При правильном выборе уровня ограничения нелинейного элемента среднее значение постоянной времени фильтра, для конкретных характеристик случайной функции f, может быть сделано достаточно малым, что уменьшит влияние отклонения параметров системы от расчетных на понижение ее устойчивости. В то же время, при любой величине высокочастотной помехи скорость выходного сигнала Хвых не будет отличаться от скорости сигнала Xz, не содержащего высокочастотной номехи, на величину, большую, чем уровень ограничения нелинейного звена 2, что свидетельствует о высоких фильтрующих свойствах предлагаемого устройства.
Предмет изобретения
Вычислительное устройство для систем автоматического управления при наличии в управляюш,их сигналах высокочастотной и низкочастотной помех, содержащее замкнутый контур с нелинейным и двумя суммирующимн элементами, к одному из которых подключен источник управляющего сигнала, содер кащий высокочастотную помеху, а к другому суммирующему элементу через дефференцирующий элемент подключен источник
управляющего сигнала, содержащий низкочастотную помеху, отличающееся тем, что, с целью упрощения устройства, замкнутый контур выполнен в виде последовательно соединенных суммирующих элементов с включенным между ними нелинейным элементом типа сигнатуры и интегрирующего элeмeнт, охваченных жесткой обратной связью.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕЛИНЕЙНЫЙ ФИЛЬТР НИЗКОЙ ЧАСТОТЫ | 1972 |
|
SU432451A1 |
| Фильтр для систем автоматического регулирования | 1982 |
|
SU1016770A1 |
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1966 |
|
SU285080A1 |
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО | 1972 |
|
SU434377A1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1992 |
|
RU2092784C1 |
| Нелинейный фильтр | 1984 |
|
SU1190361A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ И УГЛОВ ОРИЕНТАЦИИ КОРАБЛЯ С УЧЕТОМ ДЕФОРМАЦИЙ | 2004 |
|
RU2261417C1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| РЕЗЕРВИРОВАННОЕ ЗВЕНО СИСТЕМЫ АВТОМАТИЧЕСКОГО | 1973 |
|
SU408281A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2006 |
|
RU2330792C1 |
-H.ILJ
-J -ibi- 1-.. I
