В предлагаемом автоматическом приборе для вычерчивания плана и профиля пройденного пути в целях передачи угла наклона с местности на масштабное устройство применена система гибких связей, передающих движение ролику, управляющему движением планшета с бумагой, от подвижной рамы, расположенной на тележке и принимающей при движении тележки наклон, соответствующий профилю местности, а для вычерчивания плана пройденного пути заднее колесо прибора выполнено поворотным и связано с переднею осью и с планшетом.
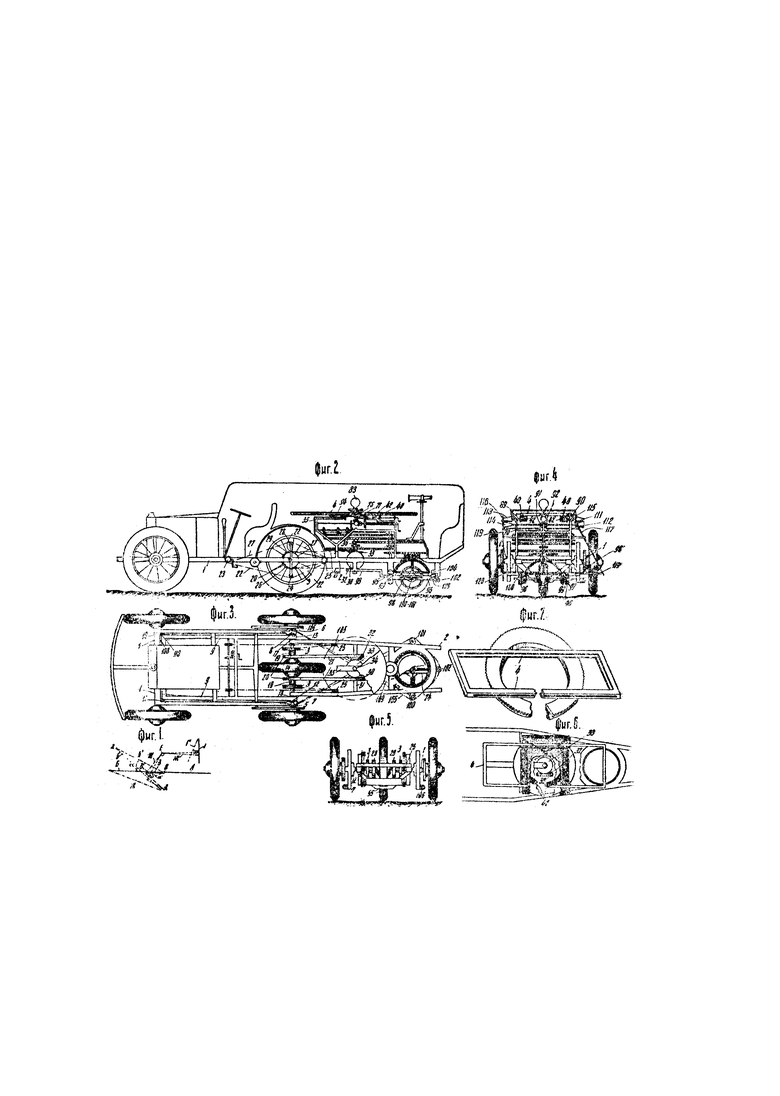
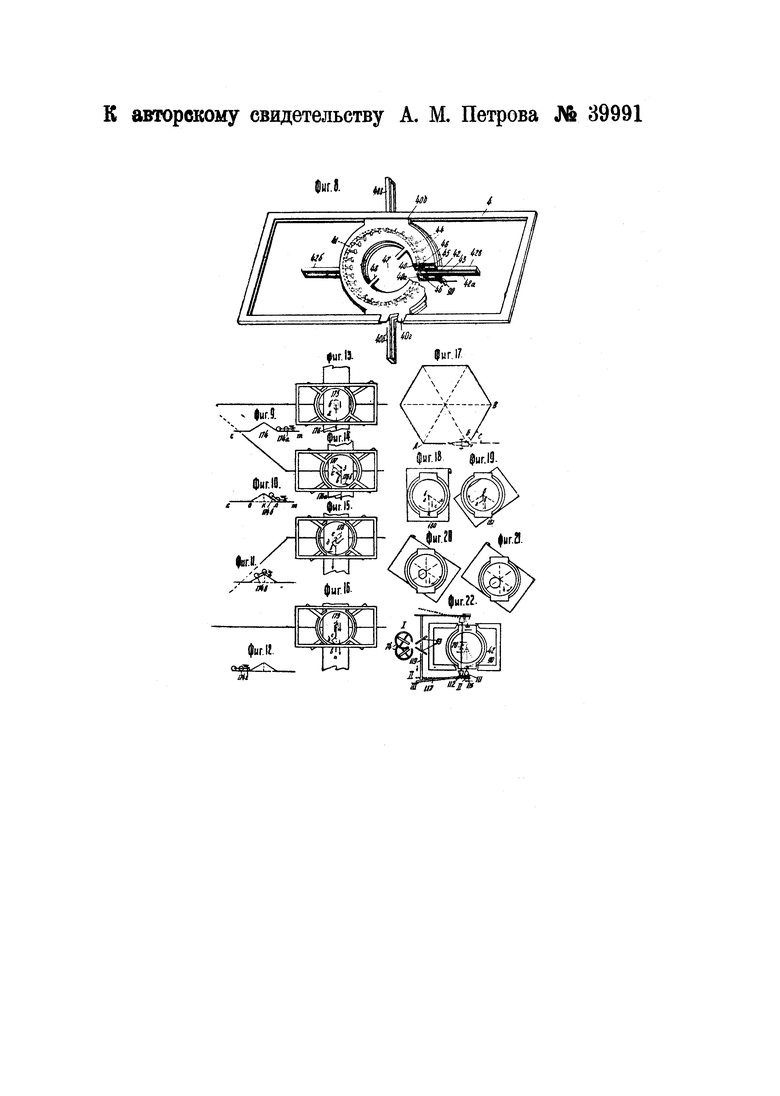
На схематическом чертеже фиг. 1 изображает схему действия прибора; фиг. 2 - вид прибора сбоку; фиг. 3 - вид его сверху; фиг. 4 и 5 - вид его сзади и спереди; фиг. 6, 7 и 8 - детали устройства прибора; фиг. 9, 10, 11, 12 - схему перемещения прибора по местности с рельефом; фиг. 13, 14, 15, 16 - соответствующее перемещение планшета; фиг. 17 - схему замкнутого пройденного прибором пути; фиг. 18, 19, 20, 21 - перемещение планшета при зачерчивании плана пройденного пути; фиг. 22 - передачу от заднего колеса к планшету для перемещения его при движении аппарата по криволинейному пути.
Действие прибора основано на следующем принципе. Предположим, что А и Б (фиг. 1) - две плоскости, шарнирно соединенные в точке В. В связи с плоскостью А имеются рычаг Г и блоки Д и Е, через которые перекинут трос Ж, прикрепленный своими концами к плоскости Б и рычагу Г и некоторою промежуточною точкою - к рычагу З. Плоскость Б, перемещаясь в положение Б′, образует с первоначальным своим положением угол α, причем длина троса между концом плоскости Б′ и шкивом Д стала на длину аб больше длины троса между теми же точками при первоначальном положении плоскости Б, вследствие чего рычаг 3′ отклоняется в сторону блока Д в положение 3 и образует угол α′ с первоначальным положением рычага 3. Отклонившись на угол α′, рычаг тянет с собой вторую часть троса Ж и заставляет рычаг Г переместиться в положение, образующее угол α′′ с первоначальным положением. При известных соотношениях все три угла α, α′ и α′′ могут быть равны между собой.
В предлагаемом приборе тележка 1 (фиг. 2-5) соответствует плоскости Б схемы, тележка 2 - плоскости А, шкив 3 (фиг. 2, 3, 5) - рычагу 3 и рама 4 - рычагу Г. Тележка 1 укреплена на поворотной оси передних колес подвижно в точках 5 и 6 и снабжена осями для двух задних колес и двумя пазовыми рейками 7 и 8 (фиг. 3, 4, 5). Тележка 2 скреплена с подвижной рамой 9, которая, в свою очередь, в точках 10 и 11 подвижно скреплена с тележкой 1 и скользящими колодочками 12 и 13 вставлена в пазовые рейки 7 и 8, что позволяет задней части подвижной рамы 9 опускаться и подниматься сообразно рельефу пути колеса 14. С подвижной рамой 9 соединена подвижно тележка 2 (так что, собственно говоря, плоскости Б на схеме соответствует подвижная рама 9, а плоскости А - тележка 2) в точках 17 и 18 общей осью 19 колеса 14, свободно вращающегося на оси 19 и не связанного ни с какой частью прибора (фиг. 3).
Шкив 3 (фиг. 2, 3, 5) имеет пустотелую ось, общую со шкивом 20 бесконечной цепи 21, которая свободно надета на общую ось 19; таким образом, шкивы 3 и 20 сами по себе не имеют скрепления ни с подвижной рамой 9, ни с тележкой 2. Тросу Ж схемы соответствует в приборе гибкая связь 22 (трос при гладком блоке или цепь при зубчатом шкиве), которая одним концом укреплена на блоке 23, помещенном на подвижной раме 9, перекинута через блок 24, помещенный на стойке тележки 2, проходит через блок 25 и другим концом, обогнув блок 3 сверху, закреплена в точке 26. Эта гибкая связь осуществляет соответствующий поворот в сторону ролика 76 со всей его передаточной системой на шестерне 71 в то время, как подвижная рама 9 поднимает свою переднюю часть, забирая высоту. Для обратного поворота ролика 76 при движении подвижной рамы 9 вниз служит гибкая связь 27, которая закреплена в том же блоке 23 вместе с гибкой связью 22, но перекинута через блок 28, укрепленный на стойке тележки 2 выше оси, проходит через блок 25 и другим концом, обогнув блок 3 снизу, закреплена в точке 29. Когда передняя часть подвижной рамы 9 при избегании передних ее колес подымается, происходит натяжение нижней гибкой связи 22 и ослабление верхней 27, вследствие чего блок 3 поворачивается, разматывая гибкую связь 22 и наматывая гибкую связь 27. При спуске рамы происходит обратное вращение блока 3. Аналогичное вращение имеет шкив 20, который передает вращение шкиву 30 (фиг. 2, 3), насаженному свободно на ось 31. Шкив 30 через коническую шестерню 32 передает вращение конической шестерне 33, насаженной на центральный вал 34 масштабной системы. С шестерней 33 жестко скреплен рычаг 35, соединенный наглухо с поворотной системой 94 ролика 76 (фиг. 2, 3, 6). Таким образом, угол подъема или опускания передних колес в точности передается ролику 76, отклоняющемуся влево при подъеме и вправо при опускании.
Для того, чтобы лист бумаги, на котором прибором вычерчивается требуемая кривая, изменяя угол своего положения, в то же время передвигался с нужной скоростью, ролик 76 поворачивается на нужный угол и при всяком измененном положении, вращаясь, толкает лист в ту сторону, куда повернут. Движение же листа согласуется с действием на него вращательного момента ролика 76 с дисковой рамой и с прямоугольной рамой 4 (фиг. 8), толкающего лист в ту или другую сторону.
Дисковая рама (фиг. 8) состоит из двух жестко связанных между собою при помощи перемычек 40б и 40в дисков 40 и 40а с отогнутыми внутрь краями; верхний диск имеет выступы 40 г и 40д, входящие в паз рамы 4 так, что диски 40 и 40а могут двигаться вдоль рамы 4, которая наглухо укреплена вдоль прибора. С внутренней стороны диски снабжены эксцентрично расположенными канавками 41, в которые вставлены ролики 46. Между отогнутыми кромками дисков 40 и 40а вставлены два других кольцеобразных диска 42 и 42а, скрепленных перемычками 42б и 42в. Нижняя кромка 43 диска 42а снабжена коническим зубчатым колесом, с которым сцеплены шестерни 89 и 90 (фиг. 4). Посредине ширины кольцеобразных дисков 42 и 42а поставлены кривошипы 44, снабженные по концам роликами 45 и 46, из коих ролики 46 вставлены в канавки 41 дисков 40 и 40а, а ролики 45 верхнего и нижнего дисков расположены попарно один против другого. При вращении дисков 42 и 42а по кругу вокруг их центра ролики 46 скользят по канавкам 41; когда диски 42 и 42а делают один полный оборот, то и кривошипы делают полный оборот, причем ролики 45 все время остаются в положении, указанном на чертеже (фиг. 8) пунктиром. Между двумя рядами роликов 45 вставлен лист бумаги, который, в соответствии с положением роликов, может быть свободно перемещаем поперек рамы 4 без нарушения всей системы, но не может перемещаться между дисками вдоль рамы, так что, если бумагу тянуть в этом направлении, то весь комплекс дисков скользит в пазах рамы 4. В центре 47 дисковой рамы на перемычке 48 укреплен пишущий аппарат.
Предположим, что нужно зачертить возвышенность 174 (фиг. 9). Прибор сначала движется по горизонтальной поверхности 174а и не образует угла; поэтому рычаг 35 удерживает ролик 76 в положении 175 поперек рамы 4, т.е. по пути движения листа в дисковой раме. Ролик 76, вращаясь от масштабной шестереночной передачи, приводимой во вращение от заднего колеса 74, толкает лист бумаги в сторону своего вращения, т.е. по стрелке 176. В это время пишущий аппарат зачерчивает проходимый путь, изображаемый линиею аб (фиг. 13). Пройдя горизонтальную площадь, прибор начинает свой подъем на возвышенность и при этом в нем образуется угол (фиг. 10), благодаря чему рычаг 35 поворачивает ролик 76 из положения 175 в положение 177 (фиг. 14), вследствие чего ролик вращается под углом к двум возможным движениям листа, а именно поперек рамы 4, (как указано стрелкой 176а когда сам лист двигается между роликами 45 дисковой рамы) и по длине рамы 4 (как указано стрелкой 176б, когда лист двигается вместе с дисковой рамой). В результате ролик 76 толкает лист по равнодействующей и прибор зачерчивает проходимое расстояние подъема в виде линии вг. Когда машина, перевалив через вершину возвышенности, начинает спускаться по наклонной 174в (фиг. 11), рычаг 35, вернувшись, в момент горизонтального положения прибора на вершине возвышенности, к первоначальному положению, поворачивает ролик 76 в положение 178 (фиг. 15) и так же, как и раньше, толкая лист по равнодействующей, зачерчивает спуск в виде линии де. Наконец, при движении прибора опять по горизонтальной площади 174г (фиг. 12) рычаг 35 возвращается в первоначальное положение и ролик 76 приходит в положение 179, как и в начале работы (фиг. 16).
Из приведенного описания видно, что горизонтальная местность зачерчивается благодаря работе ролика 76 и движению листа бумаги между роликами 45 дисковой рамы, а наклонная местность, благодаря совместному движению листа бумаги и движению дисковой рамы - по длине рамы 4. Если наглухо скрепить дисковую раму с рамой 4, прекратив этим движение листа в направлении стрелки 176б (фиг. 14) и оставив ему одно возможное движение по направлению 176а, то в результате вместо ломаной линии пвдер (фиг. 16) получат только одну прямую линию пр, соответствующую, в данном масштабе, горизонтальной проекции линии местности тс (фиг. 9-12).
Для того, чтобы при движении прибора по ломаной или кривой линии эта ломаная или кривая зарисовывалась на бумаге, необходимо, чтобы лист бумаги поворачивался на нужный угол, т.е. чтобы его поворот зависел от хода прибора, делающего повороты вправо я влево. Для возможности поворотов прибор при движении его по местности колесо 74 устроено поворотным около шарнира 95 (фиг. 2 и 5), при помощи которого к тележке 2 подвижно прикреплена круговая рама 96 с пазом 97 и прорезом 98, ушком 102 и роликом 103 (фиг. 2, 4, 5); внутри рамы 96 в ее пазу 97 ходит другая круговая рама 99, на которой укреплена наглухо ось колеса 74 с выступающими концами 100 и 101, снабженными ушками для прикрепления тросов. Таким образом, благодаря скольжению круговой рамы 99 в пазу 97 колесо может вращаться вокруг своей отвесной линии и в то же время, благодаря скольжению ролика 103 в кронштейне 104, может вращаться по радиусу относительно шарнира 95. Для возможности поворота и отклонения колеса 74 на соответствующий угол ось этого колеса соединена с осью передних колес при помощи троса, 105, укрепленного в ушке 102, перекинутого через блок 106 и соединенного другим концом с осью передних колес в точке 108, и троса 109, также перекинутого через блок 106 и соединенного одним концом с ушком 100, а другим - с осью передних колес в точке 110. Таким образом, при повороте передних колес в ту или другую сторону колесо 74 также поворачивается тросом 105 или 109.
Благодаря описанному устройству колесо 74 идет точно по кривой передних колес и постоянно отклоняется на угол поворота прибора; этот угол поворота передается чертежному листу при помощи рычага 93, составляющего продолжение рамы, поддерживающей колесо 74. Этот угол отклонения передается дисковой раме при помощи конусовидных шкивов 111 и 112, 113 и 114 (фиг. 4), из коих шкивы 112 и 114 приводятся в действие масштабной шестерней 70 и вращаются со скоростью, соответствующею данному масштабу, а шкивы 111 и 113 через посредство шестерен 89 и 90 производят поворот дисковой рамы. Эта передача производится при помощи передвижения ремней 115 и 116 по длине конусовидных блоков рычагами 117 и 118, приводимыми в качательное движение через посредство реек 119 и 120 рычагом 93.
Рычаг 117 включает конусовидный блок 112 в работу, а 118 выключает конусовидный блок 114 из работы, в силу чего происходит вращение дисковой рамы то в одну, то в другую сторону.
Предположим, что прибор перемещается по шестиугольнику (фиг. 17). Прибор, пройдя сторону АБ и зачертив ее в виде отрезка аб (фиг. 18), в точке Б делает поворот на угол С, а следовательно и лист должен быть повернут на такой же угол С так, чтобы сторона бд перешла в положение стороны бц, что производится поворотом дисковой рамы 42 - 42а, которая вращается в ту и другую сторону при помощи шестерен 90 и 89 конусных шкивов 111 и 113. Передняя ось прибора, сделав поворот с линии направления АБ на новую линию направления БВ, поворачивает тросами заднее колесо 74 в обратную сторону, дабы оно шло до конца по прямой линии АБ, образуя угол, а не описывая какой-либо кривой. При этом повороте колесо 74 панимает положение I (фиг. 22), в силу чего рычаг 93 повернется на угол, равный углу поворота передней оси, и сместит на некоторую величину рейку 119, которая отклонит рычаг 117, переходящий при этом из положения II положение III, сдвинув при этом ремень 115. От этого конусный шкив 112, вращаясь от масштабной шестерни 70, передает ускоренное вращение конусному шкиву 111, а вместе с ним шестерне 90, включенной в дисковую раму, благодаря чему сообщит поворот и этой последней, вращая лист бумаги на нужный угол, причем продольное движение его сохранится прежнее.
После поворота дисковой рамы из положения 180 (фиг. 18) в положение 181 (фиг. 19) сторона БВ зачерчивается в виде отрезка бв таким же образом, как и сторона АБ. Дальнейшее вычерчивание сторон производится таким же образом (фиг. 20). Тот же процесс зачерчивания происходит при прохождении кривых (фиг. 21).
В описанном приборе может быть применено приспособление для отметки высот.
1. Автоматический прибор для вычерчивания плана и профиля пройденного пути, отличающийся тем, что, в целях передачи угла наклона с местности на масштабное устройство, в нем применена система гибких связей 22, 27, передающих движение от подвижной рамы 9, расположенной в тележке 1 и принимающей соответствующий наклон при движении тележки, ролику 76, управляющему движением планшета, через посредство свободно сидящего на оси шкива 3.
2. Форма выполнения прибора по п. 1, отличающаяся тем, что, в целях передачи повышения и понижения пути, связи 22, 27 одним своим концом укреплены к блоку 23, помещенному на подвижной раме 9, и протянуты через блоки 24, 25, 28, а другим концом укреплены с двух сторон по диаметру к свободно сидящему на оси 19 шкиву 3, связанному, в свою очередь, посредством гибкой передачи со свободно сидящим на валу 31 шкивом 30, несущим шестерню 32, предназначенную для передачи через шестерню 33 движения рычагу 35, управляющему движением планшета через поворотную систему 94 и ролик 75.
3. Форма выполнения прибора по пп. 1 и 2, отличающаяся том, что для передвижения листа бумаги перед неподвижно установленным пишущим приспособлением 83, предназначенным для вычерчивания профиля и плана пути, применена неподвижная рама 4 с пазами 11, несущая два параллельных жестко связанных диска 40, снабженных в нижней стороны эксцентричными канавками 41, в которые вставлены ролики 46 кривошипов 44, пропущенных через поворотные диски 42, сцепленные с шестерней 89, и снабженных на другом конце роликами 45, предназначенными для помещения между ними бумажного листа, в целях перемещения последнего соответственно направлению движения роликов 45 при вращении дисков 42.
4. Прибор по пп. 1-3, отличающийся тем, что, в целях вычерчивания плана пройденного пути соответственно ходу прибора, заднее колесо 74 прибора выполнено поворотным по отвесной и горизонтальной линии и соответственно связано с передними колесами и листом бумаги.
5. Форма выполнения прибора по п. 4, отличающаяся тем, что для поворота колеса по отвесной и горизонтальной линиям ось его укреплена в круговой раме 99, установленной поворотно на раме 96, укрепленной на шарнире 95.
6. Форма выполнения прибора по пп. 4 и 5, отличающаяся тем, что для поворота колеса 74 соответственно ходу прибора применены тросы 105, 109, укрепленные одними концами к оси колеса 74, а другими - к оси передних колес, а для передачи угла поворота прибора к листу бумаги применен рычаг 93, одним концом жестко связанный с рамой 96, а другим через соответствующие передачи - с дисковой рамой, несущей бумагу.
7. В приборе по пп. 1-6 применение приспособления для отметки высот.
