1
Известии устройства для рекуперативно-динамического торможения электропривода подъемной лебедки при спуске груза на заданное расстояние, преимущественно для спуска в скважину колонны бурильных или обсадных труб, в которых для осуществления точной остановки груза двигатель в конце спуска переводят из режима рекуперативного торможения в режим динамического торможения.
Однако при изменении веса груза эти устройства не обеспечивают оптимального выбора соотнощения времени действия рекуперативного и динамического торможений, что приводит к увеличению времени спуска.
Предлагаемое устройство позволяет осуществить точную остановку спускаемого груза при наименьщей затрате времени независимо от его веса.
Это достигается тем, что система управления устройством содержит блок сравнения, воздействующий на элементы силовой коммутации, к входу которого подключены выход датчика оборотов двигателя и выход вычислительного устройства. На вход вычислительного устройства подаются сигнал с датчика веса и сигнал, пропорциональный напряжению возбуждения двигателя.
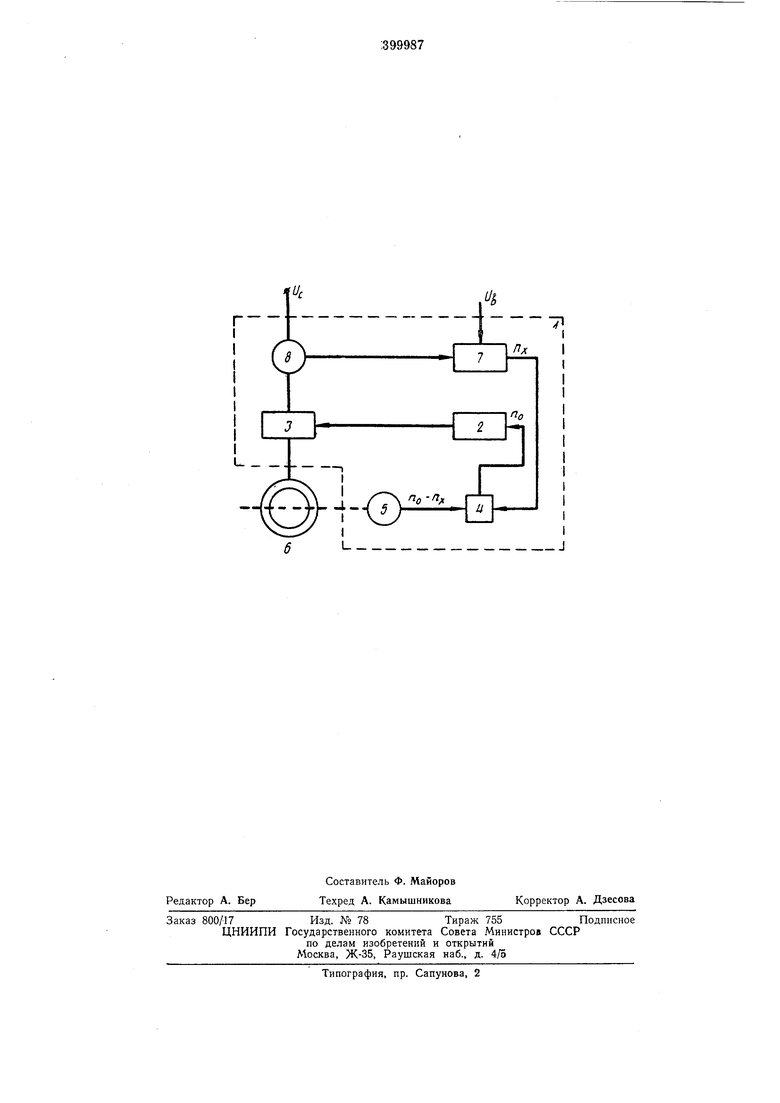
На чертеже изображена принципиальная схема предлагаемого устройства.
Система управления 1 состоит из блока сравнения 2, воздействующего на элементы силовой коммутации 3, к входу которого через ключ 4 подключены выход датчика оборотов 5 двигателя 6 и выход вычислительного блока 7. На вход вычислительного блока 7 подаются сигнал с датчика веса 8 и сигнал, пропорциональный напряжению возбуждения двигателя.
В функции вычислительного блока входит определение количества оборотов Пх, которое должен выполнить приводной электродвигатель в режиме динамического торможения
41т(Мд-MC)
где / - момент инерции системы, приведенный к валу двигателя;
о)о - угловая скорость вращения электродвигателя при рекуперативном торможении;Мд - момент двигателя при динамическом
тормож:ении; Мс - момент статический, создаваемый
грузом.
Момент двигателя в режиме динамического торможения может быть найден из соответствующей механической характеристики, полученной для некоторых постоянных параметров
цепей статора и ротора и при некоторой постоянной величине напряжения возбуждения f/в
Мд /Г.Де,
где Км - коэффициент пропорциональности между тормозным моментом двигателя и постоянным напряжением на зажимах статора асинхронного двигателя для соответствующей механической характеристики.
С целью упрощения можно принять величину момента электродвигателя в течение периода динамического торможения постоянной и равной некоторой средней величине, которая находится из характеристики динамического торможения.
Величины / и Мс зависят от веса груза и выражаются через мощность рекуперации Р. Из-за жесткости естественной механической характеристики асинхронного двигателя в режиме рекуперативного торможения юо - величина практически постоянная.
Учитывая выщеизложенное, можно написать:
„ (,Р)Кз
- КъР
где Ki - коэффициент, имеющий размерность момента инерции; Kz - коэффициент пропорциональноссти между приведенным моменком инерции груза и мощностью рекуперации;
Кз - постоянная величина, имеющая размерность угловой скорости электродвигателя в квадрате; К Км
KS - коэффициент пропорциональности между статическим моментом и мощностью рекуперации. Устройство работает следующим образом. В момент начала спуска, например колонны труб, система управления электроприводом включается в работу.
При перемещении колонны труб на длину одной свечи приводной двигатель делает По оборотов. Блок сравнения 2 приводного двигателя 6 имеет емкость, равную числу оборотов приводного двигателя, соответствующую перемещению бурильной колонны на одну свечу, т. е. По. При поступлении на вход блока сравнения 2 числа импульсов, равного п, на его выходе появляется сигнал управления.
На вход вычислительного блока 7 поступает информация о мощности рекуперативного торможения с датчика веса 8 и сигнал, пропорциональный напряжению UB. После окончаПИЯ переходного процесса, когда скорость вращения двигателя достигает величины соо, на выходе вычислительного блока 7 появляется серия импульсов Пх, соответствующая определенной длине свечи, на которой двигатель должен работать в режиме динамического торможения.
Эта серия импульсов вводится в блок 2. Одновременно в блок 2 вводятся импульсы от датчика оборотов 5 пропорционально длине
свечи, погружающейся в скважину. Когда колонна труб опустится на длину свечи, соответствующую fto-Их оборотам двигателя, в блок сравнения 2 с датчика оборотов 5 поступит По-Пх импульсов. А так как в блок сравнения
было уже предварительно введено Пх импульсов, то общее число импульсов, поступивших в блок сравнения: (па-Пх)(}.
В этот момент на выходе блока 2 появляется управляющий сигнал, который подается
на элементы силовой коммутации и переводит двигатель в режим динамического торможения.
Предмет изобретения
1.Устройство для рекуперативно-динамического торможения электропривода подъемной лебедки, содержащего приводной электродвигатель и систему управления, отличающееся тем, что, с целью повышения точности остановки и уменьшения времени при спуске груза на заданное расстояние, в системе управления совместно применены датчик числа оборотов двигателя, вычислительное устройство, блок сравнения, элементы силовой коммутации и датчик веса, причем к воздействующему на элементы силовой коммутации блоку сравнения подключены выходы датчика оборотов двигателя и вычислительного блока, рассчитывающего необходимое число оборотов двигателя при динамическом торможении в зависимости от веса спускаемого груза и напряжения возбуждения двигателя.
2.Устройство по п. 1, отличающееся тем, что в качестве датчика веса использован ваттметр.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2309890C2 |
| Электропривод | 1985 |
|
SU1307522A1 |
| Способ управления тиристорным электроприводом постоянного тока буровой лебедки | 1986 |
|
SU1394384A1 |
| УСТРОЙСТВО для ПЛАВНОГО АВТОМАТИЧЕСКОГО | 1969 |
|
SU253110A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2008 |
|
RU2375811C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МНОГОМОСТОВЫМ ТИРИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1980 |
|
SU1001841A1 |
| УСТРОЙСТВО СОВМЕЩЕННОГО ЭЛЕКТРИЧЕСКОГО ТОРМОЗА И ЭЛЕКТРОПРИВОДА ПОДАЧИ ДОЛОТА ДЛЯ БУРОВОЙ ЛЕБЕДКИ | 2002 |
|
RU2222490C1 |
| Реверсивный электропривод | 1983 |
|
SU1116514A1 |
| УСТРОЙСТВО ДЛЯ ИМПУЛЬСНОГО РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОГО ТОРМОЖЕНИЯ | 1972 |
|
SU426889A1 |
| Устройство автоматического управления электротормозной машиной бурового агрегата | 1982 |
|
SU1082927A1 |