ю
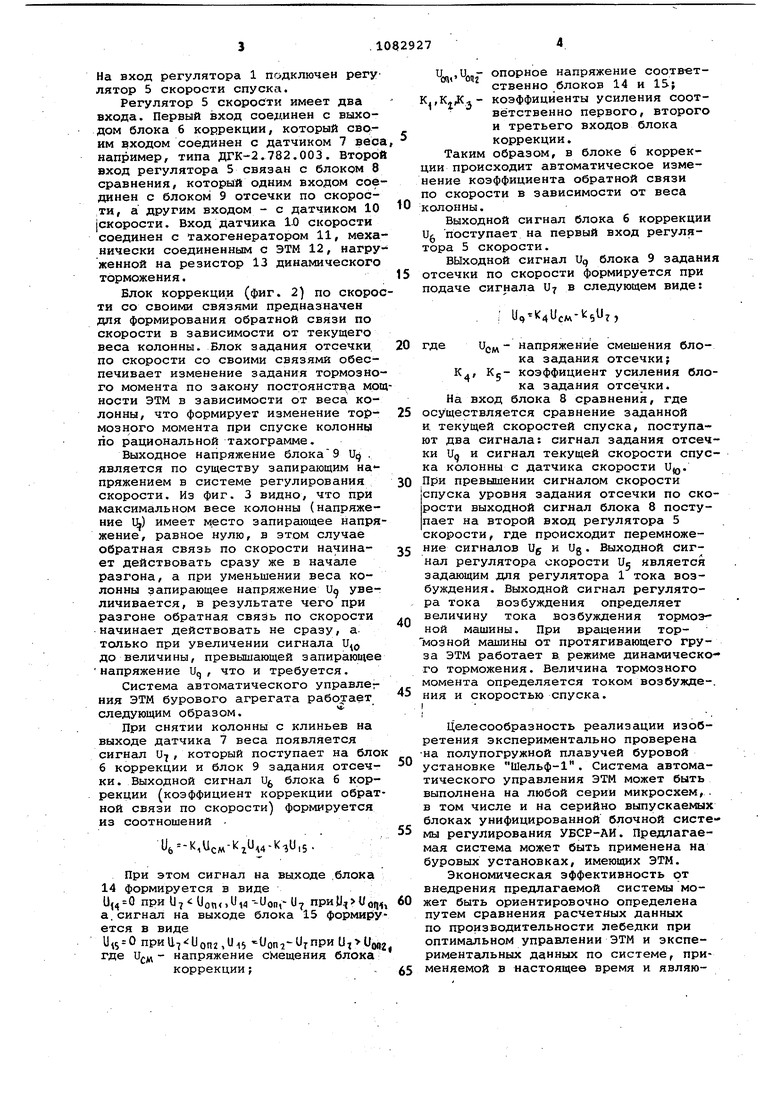
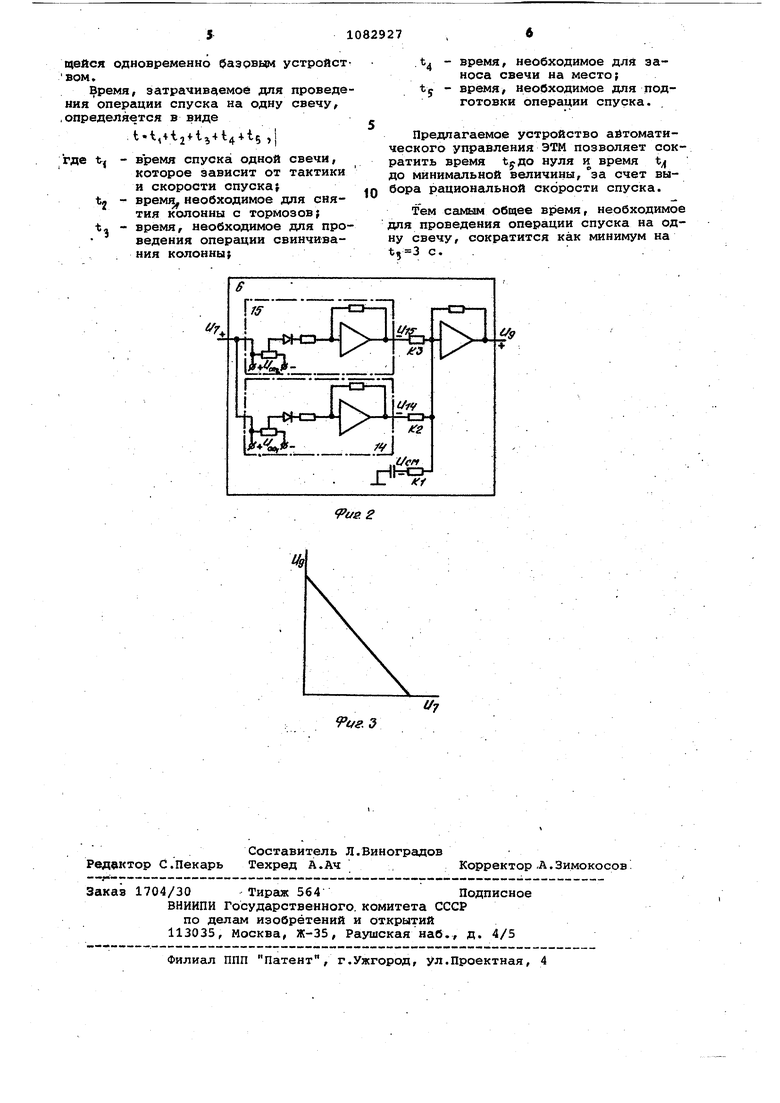
Изобретение относится к буровой технике и может быть использовано в устройствах регулирования тормозного момента буровой лебедки. Торможение буровой лебедки при спуске бурильной или обсадной колон ны в скважину производится при помо щи основного механического тормоза и вспомогательной электрической тор мозной машины эти), которая соедин на с валом барабана лебедки и воспринимает энергию, развиваемую при спуске груза. Кинематические сх мы допускают в качестве ЭТИ на буро вых установках с электроприводом постоянного тока использовать элект родвигатель лебедки, работающий в р жиме динамического торможения. Известно устройство, содержащее ЭТИ, резистор динамического торможе ния, обмотку возбуждения, датчик то ка возбуждения, управляемый тиристорный возбудитель, регулятор тока возбуждения, задатчйк тока возбужде {ния, В данном устройстве тормозной момент формируется с помощью задатчика тока возбузкдения ЭТМ l . Известно также устройство, содер жащее ТМ, резистор динамического торможения, управляемый тиристорный возбудитель, обмотку возбуждения, Датчик тока возбуждения, регулятор тока возбуждения, устройство сравнения заданной и текущей скорости спус ка, задатчйк скорости и регулятор скорости спуска Н. В устройстве для формирования тор мозного момента используется обратная связь по скорости, вступающая в действие по достижении заданного значения скорости, задание которой определяется и устанавливается.бурильщиком в зависимости от веса колонны. В устройстве используется постоянная обратная связь по скорости, т.е. нет регулирования коэффициента обратной связи по скорости, что ухудшает качественные показатели динамических процессов разгона колонны. В устройстве не предусмотрен также автоматический выбор рациональной скорости спуска. Известны также устройства ручного управления ЭТМ, не содержащие элемен тов автоматики з . Недостатком указанных устройств .является то, что установившаяся скорость спуска колонны в этих устройствах выбирается бурильщиком в зависимости от веса колонны, наблюдаемого по индикатору веса. При этом для обеспечения интенсивного разгона лебедки до установившейся скорости в устройстве применяется обратная связь по скорости, вступающая в действие после заданного фиксированного з.начения скорости, устанавливаемого бурильщиком. Наиболее близким по технической сущности к изобретению является устройство управления, содержащее блок сравнения, выход которого соединен с одним из входов регулятора скорости, выход которого через регулятор тока с датчиком тока возбуждения соединен с входом тиристорного возбудителя ЭТМ. в известном устройстве бурильщик устанавливает сигнал отсечки по скорости на величину обратной связи по скорости, в зависимости от показаний индикатора веса колонны 4 . Недостатком известного устройства является то, что задание на тормозной момент при спуске, а поэтому и значение установившейся скорости спуска выбираются бурильщиком. При этом неточное задание уставки командоаппарата приводит к тому, что при завышении веса уменьшается устаiнoвившaяcя скорость спуска и тем снижается производительность ле бедки.При задании уставки веса меньше действительного веса колонны пе регружаются ЭТМ и другие элементы привода, что приводит к снижению надежности устройства. Кроме того, ручная установка командоаппарата дошолнительно требует постоянного внимания бурильщика на не основных операциях спускоподъема. Цель изобретения - повышение скорости спуска колонны. Поставленная цель достигается тем, что устройство автоматического управления электротормозной машиной бурового агрегата, содержащее блок сравнения , .выход которого соединен с одним из входов регулятора скорости, выход которого через регулятор тока с датчиком тока возбуждения соединен с входом тиристорного возбудителя электротормозной машины, дополнительно снабжено блоком коррекции, блоком задания отсечки по скорости и датчиком веса колонны, соединенным через блок коррекции с регулятором скорости, а через блок отсечки по скорости - с блоком сравнения. На фиг. 1 представлена блок-схема системы автоматического управления электротормоз ной машиной бурового агрегата; на фиг. 2 - блок-схема блока коррекцииf на фиг. 3 -график, иллюстрируюашй работу блока отсечки по скорости. Регулятор 1 тока (фиг. 1) соединен с входом тиристорного возбудите- ля 2, выход которого подключен к обмотке 3 возбуждения. Датчик 4 тока возбуждения соединен обратной связью по току с входом регулятора 1 тока. На вход регулятора 1 подключен регу лятор 5 скорости спуска. Регулятор 5 скорости имеет два входа. Первый вход соединен с выходом блока 6 коррекции, который своим входом соединен с датчиком 7 вес например, типа ДГК-2.782.003. Второ вход регулятора 5 связан с блоком 8 сравнения, который одним входом сое динен с блоком 9 отсечки по скорости, а другим входом - с датчиком 10 |скорости. Вход датчика 10 скорости соединен с тахогенератором 11, меха нически соединенным с ЭТИ 12, нагру женной на резистор 13 динамического торможения. Блок коррекции (фиг. 2) по скоро ти со своими связями предназначен для формирования обратной связи по скорости в зависимости от текущего веса колонны. Блок задания отсечки по скорости со своими связями обеспечивает изменение задания тормозно го момента по закону постоянства мо ности ЭТМ в зависимости от веса колонны, что формирует изменение тормозного момента при спуске колонны по рациональной тахограмме. Выходное напряжение блока9 щ . является по существу запирающим на пряжением в системе регулирования скорости. Из фиг. 3 видно, что при максимальном весе колонны (напряжение 1) имеет место запирающее напря жение, равное нулю, в этом случае обратная связь по скорости начинает действовать сразу же в начале разгона, а при уменьшении веса колонны запирающее напряжение увеличивается, в результате чего при разгоне обратная связь по скорости начинает действовать не сразу, а. только при увеличении сигнала U до величины, превышающей запирающее напряжение Uq, что и требуется. Система автоматического управлег ния ЭТМ бурового агрегата работает следующим образом. При снятии колонны с клиньев на выходе датчика 7 веса появляется сигнал U-J , который поступает на бло б коррекции и блок 9 задания отсечки. Выходной сигнал и блока б коррекции (коэффициент коррекции обрат ной связи по скорости) формируется из соотношений . U6 -KiUcM-k:zUA4-t U,5. При этом сигнал на выходе ,блока 14 формируется в виде при l 7iJonoUw--Uon,-U7 прии.,ио, а.сигнал на выходе блока 15 формиру ется в виде при11 иопг,1115 ирп,-итприи иов где - напряжение смещения блока коррекции;и ,UQ.- опорное напряжение соответственно блоков 14 и IS; К. ,К,Да- коэффициенты усиления соответственно первого, второго и третьего входов блока коррекции. Таким образом, в блоке 6 коррекции происходит автоматическое изменение коэффициента обратной связи по скорости в зависимости от веса колонны. Выходной сигнал блока б коррекции и поступает на первый вход регулятора 5 скорости. выходной сигнал Uq блока 9 задания отсечки по скорости формируется при подаче сигнала }- в следующем виде: ; ll,-i«:4UcM- 5 T, напряжение смешения блогдека задания отсечки; К, Kg- коэффициент усиления блока задания отсечки. На вход блока 8 сравнения, где осуществляется сравнение заданной и текущей скоростей спуска, поступают два сигнала: сигнал задания отсечки Uq и сигнал текущей скорости спуска колонны с датчика скорости и. При превышении сигналом скорости спуска уровня задания отсечки по скорости выходной сигнал блока 8 поступает на второй вход регулятора 5 скорости, где происходит перемножение сигналов Ug и Ug. Выходной сигнал регулятора скорости Ug является заданндим для регулятора 1 тока возбуждения. Выходной сигнал регулятора тока возбуждения определяет величину тока возбуждения тормозной машины. При вращении тормозной машины от протягивающего груза ЭТМ работает в. режиме динамическо- го торможения. Величина тормозного момента определяется током возбужде-. ния и скоростью спуска. I , Целесообразность реализации изобретения экспериментально проверена на полупогружной плавучей буровой установке Шельф-. Система автоматического управления ЭТМ может быть выполнена на любой серии микросхем,. в том числе и на серийно выпускаемых блоках унифицированной блочной системы регулирования УБСР-АИ. Предлагаемая система может быть применена на буровых установках, имеющих ЭТМ. Экономическая эффективность от внедрения предлагаемой системы может быть ориентировочно определена путем сравнения расчетных данных по производительности лебедки при оптимальном управлении ЭТМ и экспериментальных данных по системе, применяемой в настоящее время и являющейся одновременно разовым устройством.
Время, затрачивг1емое для проведения операции спуска на одну свечу,
.определяется в виде
,t.t, )i
где tj - время спуска одной свечи, которое зависит от тактики и скорости спускаf te - время, необходимое для снятия колонны с тормозов; t, - время, необходимое для про ведения операции свинчивания колонны;
t - время, необходимое для заноса свечи на место;
ty - время, необходимое для подготовки операции спуска.
Предлагаемое устройство автоматического управления ЭТМ позволяет сократить время tyдo нуля и время до минимальной величины, за счет выбора рациональной скорости спуска.
Тем самым общее время, необходимое для проведения операции спуска на одну свечу, сократится как минимум на с. .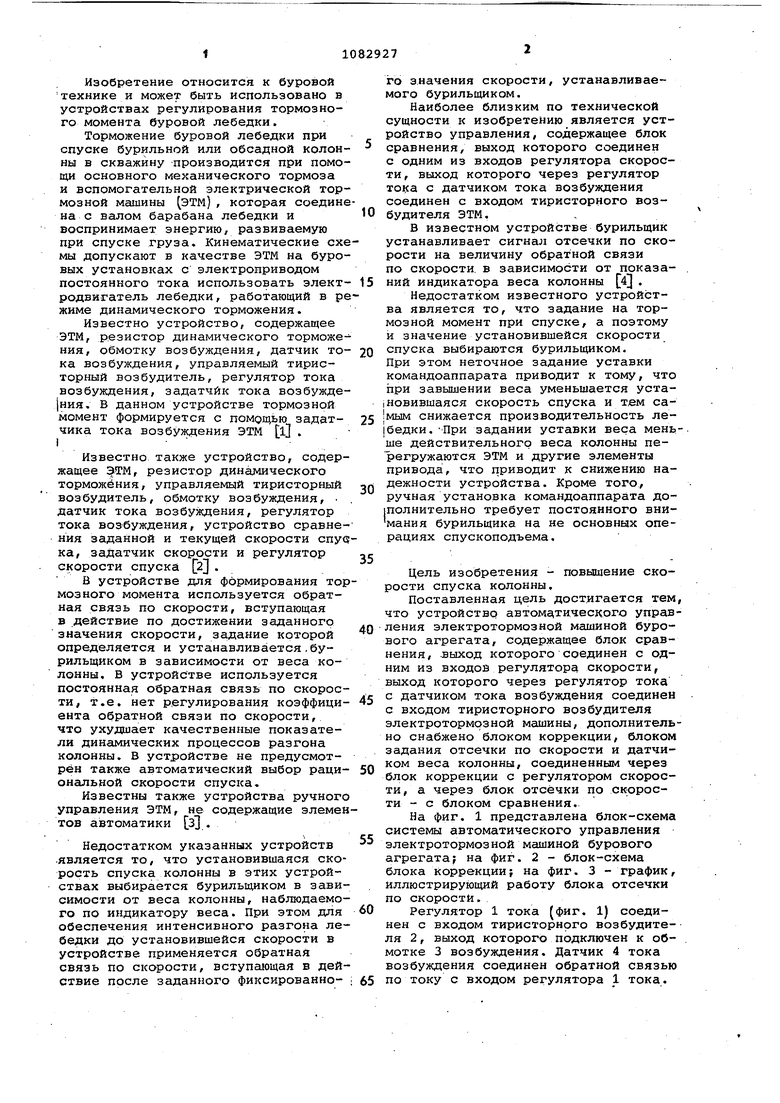
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления тормозной электрической машиной буровой лебедки | 1981 |
|
SU1046883A1 |
| Устройство для управления спуско-подъемными операциями на буровых установках | 1986 |
|
SU1357551A1 |
| Способ управления тиристорным электроприводом постоянного тока буровой лебедки | 1986 |
|
SU1394384A1 |
| Устройство для спуска и подъема бурильной колонны | 1981 |
|
SU1027376A1 |
| Устройство для управления спуско- подъемными операциями на буровых установках | 1978 |
|
SU791953A1 |
| Система автоматического управления электротормозной машиной буровой лебедки | 1990 |
|
SU1737107A1 |
| Электропривод постоянного тока буровой лебедки | 1988 |
|
SU1577055A1 |
| Электропривод | 1981 |
|
SU985911A1 |
| Устройство для управления электромагнитным ферропорошковым тормозом | 1985 |
|
SU1323791A1 |
| Регулятор подачи долота | 1982 |
|
SU1127970A1 |
УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОТОРМОЗНОЙ МАШИНОЙ БУРОВОГО АГРЕГАТА, содержащее блок сравнения, выход которого.соединен с одним из входов регулятора скорости, выход которого через регулятор тока с датчиком тока возбуждения соединен с входом тиристорного возбудителя электротормозной машины, отличающееся тем, что, с целью повышения скорости спуска колонны, оно дополнительно снабжено блоком коррекции, блоком зеодания отсечки по скорости и датчиком веса колонны, соединенным через блок коррекции с регулятором скорости, -а через блок отсечки по скорости - с блоком сравнения.. (Л с:
9tfS. J
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Моцохейн Б.И, Парфенов Б.М | |||
| Электропривод буровых лебедок | |||
| М., Недра, 1978, с | |||
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| Тематические научно-технические обзоры | |||
| М., ВНИИОЭНГ, 1970, с | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Зарубежные буровые установки с автономным электрическим приводом | |||
| Обзор зарубежной литературы | |||
| М., ВНИИОЭНГ, 1968, С | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| . | |||
