1
Изобретение относится к области авиационной техники и предназначено для настройки в наземных условиях бортовых систем управления заходом на посадку (БСУ-ЗП).
Известные устройства, применяемые в настоящее время, не учитывают аэродинамических нагрузок, создаваемых встречным потоком воздуха на рулевые поверхности самолета (рули высоты, направления и т. д.). Иастройка по критерию табличной сверки углов отклонения рулевых поверхностей и углов отклонения поворотного стола с гироскопическими датчиками БСУ-ЗП не позволяет достаточно точно настроить каналы курса, крена и тангажа.
Для уточнения характеристик и подстройки каналов существующие устройства предусматривают дополнительные полеты, во время которых нроводится подрегулировка БСУ-ЗП.
Цель изобретения-создание устройства для моделирования аэродинамических нагрузок, которое нозволит устранить отмеченные недостатки и повысить качество настройки, уменьшить количество дополнительных полетов инолучить существенный экономический эффект.
Это достигается введением функционального преобразователя и датчиков угловых перемещений в цепи обратной связи каналов курса, крена, тангажа.
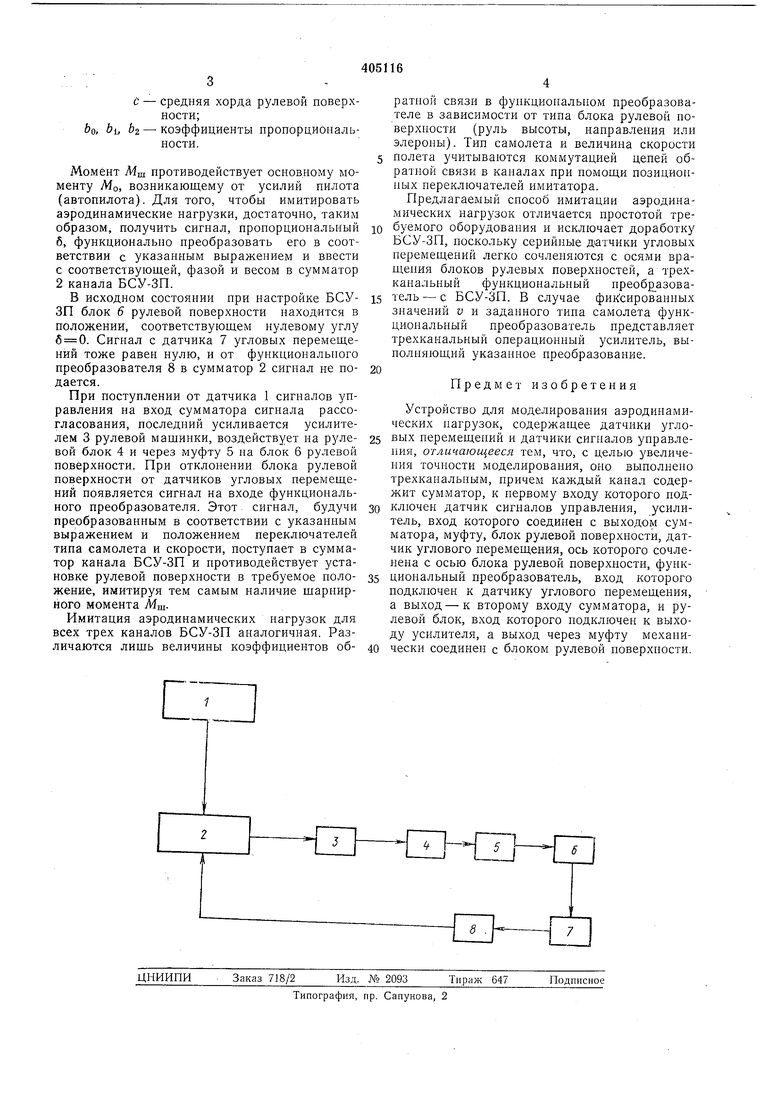
Иа чертеже показана структурная схема одного из каналов предлагаемого трехканального устройства для моделирования.
Она содержит датчик 1 сигналов управлепня; сумматор 2; усилитель 3; рулевой блок 4; муфту 5; блок 6 рулевой поверхности; датчик 7 угловых перемещений; функциональный преобразователь 8.
Встречные потоки воздуха в полете создают в блоке рулевых поверхпостей усилия, противодействующие усилиям нилота (автопилота), прикладываемым к рычагам управления самолетом.
Величина противодействующих усилий определяется ншрпирным моментом, который равен
M (b, + b,o + b,Щ pvSc,
гдеЛ1ш - щарнирный момент;
а - угол атаки;
б - угол отклонения рулевой новерхности;
- pv2 - скоростной напор набегающеZi
го нотока; и - скорость; 5 - площадь рулевой поверхности
за осью вращения; с - средняя хорда рулевой поверхности;Ьо, bi, bz--коэффициенты пропорциональности. Момент Мш противодействует основному моменту MO, возникающему от усилий пилота (автопилота). Для того, чтобы имитировать аэродинамические нагрузки, достаточно, таким образом, получить сигнал, пропорциональный б, функционально преобразовать его в соответствии с указанным выражением и ввести с соответствующей, фазой и весом в сумматор 2 канала БСУ-ЗП. В исходном состоянии при настройке БСУЗП блок 6 рулевой поверхности находится в положении, соответствующем нулевому углу 6 0. Сигнал с датчика 7 угловых перемещений тоже равен нулю, и от функционального преобразователя 8 в сумматор 2 сигнал не подается. При поступлении от датчика 1 сигналов управления на вход сумматора сигнала рассогласования, последний усиливается усилителем 3 рулевой машинки, воздействует на рулевой блок 4 и через муфту 5 на блок 6 рулевой поверхности. При отклонении блока рулевой поверхности от датчиков угловых перемещений появляется сигнал на входе функционального преобразователя. Этот сигнал, будучи преобразованным в соответствии с указанным выражением и положением переключателей типа самолета и скорости, поступает в сумматор канала БСУ-ЗП и противодействует установке рулевой поверхности в требуемое положение, имитируя тем самым наличие шарнирного момента Мщ. Имитация аэродинамических нагрузок для всех трех каналов БСУ-ЗП аналогичная. Различаются лишь величины коэффициентов обратной связи в функциональном преобразователе в зависимости от типа блока рулевой поверхности (руль высоты, направления или элероиы). Тип самолета и величина скорости полета учитываются коммутацией цепей обратной связи в каналах при помощи позиционных переключателей имитатора. Предлагаемый способ имитации аэродинамических нагрузок отличается простотой требуемого оборудования и исключает доработку БСУ-ЗП, поскольку серийные датчики угловых перемещений легко сочленяются с осями вращения блоков рулевых поверхностей, а трехканальный функциональный преобр азователь - с БСУ-ЗП. В случае фиксированных значений v и заданного типа самолета функциональный преобразователь представляет трехканальный операционный усилитель, выполняющий указанное преобразование. Предмет изобретения Устройство для моделирования аэродинамических нагрузок, содержащее датчики угловых перемещений и датчики сигналов управления, отличающееся тем, что, с целью увеличения точности моделирования, оно выполнено трехкаиальным, причем каждый канал содержит сумматор, к первому входу которого подключен датчик сигналов управления, усилитель, вход которого соединен с выходом сумматора, муфту, блок рулевой поверхности, датчик углового перемещения, ось которого сочленена с осью блока рулевой поверхности, функциональный преобразователь, вход которого подключен к датчику углового перемещения, а выход-к второму входу сумматора, и рулевой блок, вход которого подключен к выходу усилителя, а выход через муфту механически соединен с блоком рулевой поверхпости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования аэродинамических нагрузок | 1981 |
|
SU1001122A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЖИЗНЕННО ВАЖНЫМИ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 2014 |
|
RU2572011C1 |
| АВТОПИЛОТ ДЛЯ САМОЛЕТОВ МАЛОЙ АВИАЦИИ | 2024 |
|
RU2832351C1 |
| АВТОПИЛОТ ДЛЯ СИММЕТРИЧНОЙ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2302358C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ СИММЕТРИЧНОЙ РАКЕТОЙ | 2007 |
|
RU2374602C2 |
| КОМБИНИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ КОРРЕКТИРУЕМОЙ АВИАЦИОННОЙ БОМБОЙ | 2011 |
|
RU2489675C2 |
| Адаптивная система с эталонной моделью для управления летательным аппаратом | 2016 |
|
RU2647405C1 |
| БОРТОВОЙ КОМПЛЕКС УПРАВЛЯЕМОГО СТАБИЛИЗИРОВАННОГО ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА С ТЕЛЕВИЗИОННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2003 |
|
RU2239770C1 |
| АВТОПИЛОТ | 2008 |
|
RU2374131C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
