(54) УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ АЭРОДИНАМИЧЕСКИХ НАГРУЗОК
.1 . ; .
Изобретение относится к авиационной технике и может найти применение при контроле и.диагностике автоматических бортовых систем управления (АБСУ) в наземных условиях.
Устройство для моделирования аэродинамических нагрузок (|1 3 включающее датчики, сумматор, не учитывает аэродинамических нагрузок, создаваемых встречным потоком воздуха на рулевые поверхности самолета (рули высоты, направления и т.д.). Hactpoйкa по критерию табличной сверки углов отклонения рулевых поверхностей и углов отклонения поворотного- Ч;тола с гироскопическими датчиками АБСУ не позволяет достаточно точно настроить каналы курса, крена и тангажа.
Для уточнения характеристик и подстройки каналов существующие устройства предусматривают дополнительные полеты во время которых производится перерегулировка АБСУ.
Наиболее близким к предлагаемому по технической сущности является устройство для моделирования аэродинамических нагрузок, содержащее датчики угловых перемещений и датчики сигналов управления. Устройство выполнено трехканальным и каиздый канал содержит сумматор, усилитель, блок рулевых машинок, муфту ограничения момента рулевых машинок, блок рулевых поверхностей { состояtoщий из руля высоты, руля направления и элеронов), преобразователь угол-напряжение и функциональный преобразйватель С 2.
15
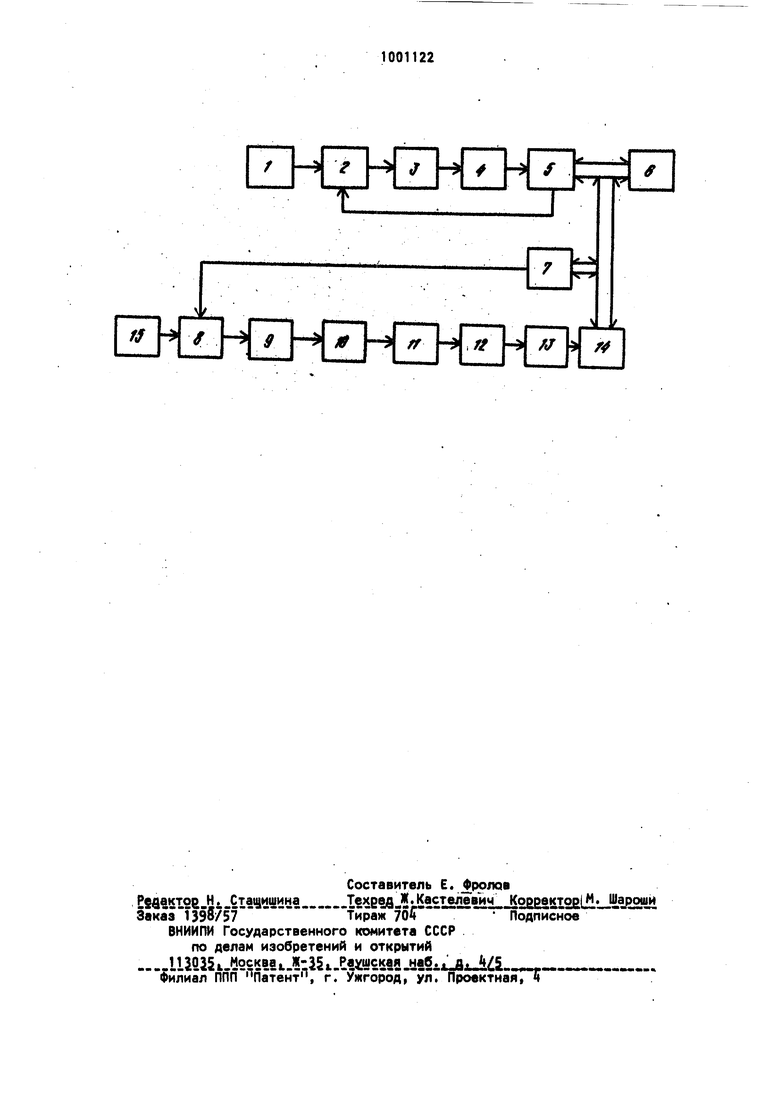
Недостатком известного устройства является отсутствие реального фиаи ческого моделирования нагрузок на рулевые машины, не учитывается : „ влияние внешних,в том числе, случайных воздействий,не контролируются динамические характеристики рулевых . машинок, являющихся основными испол | нительными механизмами автоматичес 31 кой бортовой сичстемы управления, т.е. точность моделирования аэродинамических нагрузок является низкой Это обуславливает низкую достоверность контроля и диагностирования, Г)и имитации аэродинамических нагру зок необходимо вскрытие ( либо доработка ) АБСУ, что недопустимо припроизводственном контроле. Таким образом, контроль и диагностика технического состояния АБСУ осуществляется практически на качес венном уровне. Цель изобретения - повышение точ ности моделирования. Поставленная цель достигается те что в устройство, содержащее датчик сигналов управления, первый суммато первый усилитель, блок рулевых маши нок, муфту, блок рулевых поверхностей, механически связанный с преобразователем угол-напряжение, а также функциональный преобразователь, причем выход датчика сигналов управления соединен с первым входом первого сумматора, выход которого через последовательно соединенные усилитель, блок рулевых машинок под ключен к входу муфты, один выход ко торой подключен к второму входу пер вого сумматора, другой выход муфты механически связан с блоком рулевых поверхно-тей, введены второй сумматор,второй усилитель, блок линеаризации, блок задания внешних воздействий, блок тиристорного управления и электродвигатель, выход которого через редуктор механически связан с блоком рулевых поверхностей, первый вход -второго сумматора соединен с выходом преобразова теля угол-напряжение, выход блока задания внешних воздействий подключен к второму входу второго суммато ра, выход которого через последовательна соединенные второй усилитель функциональный преобразователь, бло линеаризации и блок тиристорного управления соединен с входом электродвигателя. На чертеже представлена схема ус ройства для моделирования аэродинамических нагрузок. .Устройство содержит датчик 1 сиг налов управления, сумматор 2, усилитель 3, блок рулевых машинок, муфту 5, блок 6 рулевых прверхносте преобразователь 7 угол-напряжение, сумматор 8, усилитель 9, функционал 24 ный преобразователь 10, блок 11 линеаризации, блок 12 тиристорного управления, электродвигатель 13, редуктор Т, блок 15 задания внешних воздействий. Принцип работы устройства состоит в том, что для АБСУ имитируется режим работы, приближенный к реальному. Контроль АБСУ осуществляется с учетом случайных воздействий (турбулентность атмосферы и другие случайные факторы ). Встречные потоки воздуха в полете создают на рулевых поверхностях усилия, прютиводействующие усилиям пилота (автопилота ). Величина противодействующих усилий определяется шарнирным моментом: , . )°5pV25c , (1) где Mjjjj -шарнирный момент; oL - угол атаки; «f - угол отклонения рулевой поверхности; 0, скоростной напор набегающего потока; V - скорость; S - площадь рулевой поверхности за осью вращения; С - средняя хорда рулевой поверхности; Ь, Ь, fjrt - коэффициенты пропорциональности (в соответствии с проверяемым каналом). Принцип работы устройства состоит в следующем. При поступлении от датчика 1 сигналов управления на вход сумматора 2 сигнала рассогласования, последний усиливается усилителем 3 рулевых машин, воздействуя на блок i рулевых машинок и через муфту 5 на блок 6 рулевых поверхностей. На второй вход сумматора 2 поступает сигнал обратной связи с блока рулевых машинок через муфту 5, где происходит сравнение этих сигналов, и разность подается на вход усилителя 3 (в блоке k рулевых машинок находится встроенный преобразователь угол-напряжение, с которого и подается сигнал ). Изменяется угол отклонения блока 6 рулевых поверхностей,механически связанного с преобразователем 7 угол-напряжение. Сигнал с выхода преобразователя 7 поступает на один из входов сумматора 8. На второй вход сумматора 8 поступает, при необходимости, сигнал с блока 15 задания внешних (случайных ) воздействий. Выходной сигнал сумматора В усили- вается усилителем $, поступает на вход функционального преобразовате-S1
ля 10 и преобразовывается в соответствии с выражением (1 ) и положением переключателей блока 11 линеаризации (нелинейных преобразований типа самолета и скорости.
Для линеаризации моделирования нагрузок на блок 6 рулевых поверхностей в схему введен блок t1, на вход которого поступает преобразованный сигнал с функционального преобразова теЛя 10. С выхода блока 11 сигнал поступает на вход блока 12 тиристорного управления, осуществляющего изменение направления и угловую скорость вращения электродв 1гателя 13. Через редуктор I механическое усилие , пропорционально Мщ, подводится к муфте 5, механически соединенной с блоком 6 рулевых поверхностей. Редуктор 1 механически соединен с выходом муфты 5 и блоком 6 рулевых поверхностей , выход муфты 5 механически связан с преобразователем 7 уголнапряжение. В качестве блока 12 тиристорного управления может быть использован, например тиристорный реверсор .
Таким образом, при отклонении блока 6 рулевых поверхностей с помощью
сумматора 8, усилителя 9, преобразователя 10, блоков 11 и 12, электродвигателя 13 и редуктора k осуществляется реальное физическое моделирование нагрузок, пропорцио нальных углу отклонения блока 6. В прототипе отсутствует возможность определения коэффициентов пропорциональности или аналитических соотношений между Мщ и сигналами рассогласования вследствие отсутствия контроля за рулевыми машинками, являющимися одними из наименее надежных исполнительных устройств АБСУ Это привело к моделированию аэродинамических нагрузок с большими погрешностями.
Имитация аэродинамических нагрузок для всех трех (канала крена, тангажа и рыскания) каналов аналогична (на чертеже представлен один канал). Различаются лишь величины коэффициента обратной связи в функциальном преобразователе в зависимости от типа рулевой поверхности (руль высоты, направления или элероны ).
Использование предлагаемого устройства позволяет существенно повы122i
сить достоверность контроля исполнительных устройств ( рулевых маомн) снизить количество контрольных полетов и повысить их безопасность.
Устройство отличается простотой требуемого оборудования и исключает доработку АБСУ, так как серийные преобразователи угол-напряжение легко сочленяются с осями вращения рулевых поверхностей.
Формула изобретения
Устройство для моделирования аэродинамических нагрузок, содержащее датчик сигналов управления, первый сумматор, первый усилитель, блок рулевых машинок, муфту, блок рулевых поверхностей, механически связанный с преобразователем угол-напряжение, и функциональный преобразователь, причем выход датчика сигналов управ,ления соединен с первым входом первого сумматора, выход которого через последовательно соединенные .усилитель, блок рулевых машинок подключен к входу муфты, один выход которой подключен к второму входу первого сумматора, другой выход нуфты механически связан с блоком рулевых поверхностей, отличающееся, тем, что, с целью повышения точности, в него введены второй сумматор, второй усилитель, блок линеаризации, блок задания внешних воздействий, блок тиристорного управления и электродвигатель, выход которого через редуктор механически связан с блоком рулевых поверхностей, первый вход второго сумматора соединен с выходом преобразователя угол-напряжение, выход блока задания внешних воздействий подключен к второму входу второго сумматора, выход которого через последовательно соединенные второй усилитель, функциональный преобразователь, блок линеаризации и блок тиристорного управления соединен с входом электродвигателя .
Источники информации, принятые во внимание при экспретизе
1.Игнатов В.А. и др. Диагностические комплексы систем автоматического самолетовождения. М., Тран спорт, 1975, с. 177.
2.Авторское свидетельство СССР № «ОЗПб, кл. G Об G , 1972
(прототип).
//
Л
9
A7
ft
/
ff
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ АЭРОДИНАМИЧЕСКИХ | 1973 |
|
SU405116A1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С АВТОКОЛЕБАТЕЛЬНЫМ ПРИВОДОМ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ | 2010 |
|
RU2435131C1 |
| ВРАЩАЮЩИЙСЯ СНАРЯД С ЭЛЕКТРИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ | 2005 |
|
RU2285227C1 |
| РЕЛЕЙНЫЙ ПНЕВМОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТЫ | 2007 |
|
RU2337309C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЖИЗНЕННО ВАЖНЫМИ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 2014 |
|
RU2572011C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2536838C2 |
| РАЗОМКНУТЫЙ ПНЕВМОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СПОСОБ КОНТРОЛЯ ЕГО ДИНАМИКИ | 2000 |
|
RU2184340C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2006 |
|
RU2321814C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2527391C2 |