Предлагаемое изобретение относится к ракетной технике, а именно к автопилотам ракет.
Известны устройства, которые включают датчики угловых скоростей и линейных ускорений, блоки расчета управляющих сигналов, корректирующие устройства и исполнительные механизмы рулей, см. например, схему автопилота ракеты, представленную в книге «Динамика пространственного движения управляемых ракет», В.К.Святодух, издательство «Машиностроение», 1969 г., стр.80, рис.2.7.
Данное устройство рассматривается в качестве ближайшего аналога по данной заявке.
Применение этого устройства на ракетах с дифференциальным управлением рулями оказывается неэффективным. Действительно, при использовании указанного автопилота для ракет данного типа на каждый рулевой привод будут одновременно поступать как управляющие сигналы одного из основных каналов (курса или тангажа), так и канала крена, а также и паразитные колебания, вызванные упругостью (не жесткостью) конструкции корпуса ракеты. Поскольку любой привод не является линейной системой, а содержит целый ряд нелинейных характеристик (ограничение располагаемой угловой скорости вращения руля, ограничение максимального развиваемого момента и т.п.), то его динамические (частотные) характеристики зависят от величины управляющих сигналов, паразитных колебаний и скорости их изменения по времени.
Наиболее значительные по величине упругие колебания корпуса ракеты возникают преимущественно в момент отделения ракеты от носителя из-за ударного воздействия катапультного устройства носителя на ракету, а также за счет возмущений, вызванных аэродинамической интерференцией с самолетом-носителем. В этих условиях, при отработке каждой из рулевых машинок управляющих сигналов по двум каналам одновременно (основной канал и канал крена), велика вероятность того, что располагаемой скорости приводов рулей достаточно для отработки управляющих сигналов в основных каналах, но не хватает для отработки управляющих сигналов по крену, что в свою очередь может привести к потере устойчивости в канале крена (т.к. момент инерции ракеты вокруг продольной оси в 50…60 раз меньше, чем вокруг поперечных осей), а затем и 3-канальной неустойчивости.
Для устранения данного эффекта предлагается ограничить скорость изменения управляющих сигналов по каналам курса и тангажа.
Настоящее изобретение направлено на решение технической задачи по созданию автопилота ракеты с дифференциальным управлением рулями, обеспечивающего пространственную устойчивость во всем диапазоне высот и скоростей применения. Техническим результатом является обеспечение устойчивости в канале крена ракеты.
Поставленная задача решается тем, что в известном устройстве, содержащем датчики линейных ускорений и угловых скоростей, блоки расчета управляющих сигналов, фильтрующие блоки и сумматоры управляющих сигналов, дополнительно введены блоки ограничения скорости изменения управляющего сигнала в каналах курса и тангажа и формирователь величины ограничения указанной скорости, причем первый вход блока ограничения скорости изменения управляющего сигнала соединен с выходом фильтрующего блока, а второй вход соединен с выходом формирователя величины ограничения, вход которого соединен с выходом датчика угловой скорости крена, а выход блоков ограничения скорости изменения управляющего сигнала в каналах курса и тангажа соединен с сумматорами управляющих сигналов, блоки ограничения скорости изменения управляющего сигнала состоят из сумматора, блока усиления, ограничителя скорости изменения управляющего сигнала и интегрирующего звена, входы сумматора блока ограничения скорости изменения управляющих сигналов соединены с выходом фильтрующего блока и по отрицательной обратной связи с выходом интегрирующего звена, при этом вышеупомянутый формирователь величины ограничения состоит из задатчика допустимой скорости изменения управляющего сигнала и последовательно расположенных блока расчета модуля входной величины в заданных пределах, блока усиления и сумматора, входы которого соединены по отрицательной связи с выходом блока усиления и с выходом указанного задатчика.
На чертеже приведена структурная схема автопилота с блоками ограничения скорости изменения управляющих сигналов и формирователем величины ограничения.
Автопилот ракеты с дифференциальным управлением рулями содержит датчики линейных ускорений 1, датчики угловых скоростей 2, блок расчета управляющего сигнала в каналах курса 3, тангажа 4, крена 5, фильтрующие блоки 6.1 и 6.2. Дополнительно устройство содержит блоки ограничения скорости изменения управляющего сигнала в каналах курса и тангажа и формирователь величины ограничения указанной скорости. Блоки ограничения скорости изменения управляющего сигнала в каналах курса и тангажа 7.1 и 7.2 включают последовательно соединенные сумматор 8, входы которого соединены с выходом фильтрующего блока 6.1 и 6.2 и с выходом интегрирующего звена 11, блок усиления 9, ограничитель скорости изменения управляющего сигнала 10, входы которого соединены с выходами блока усиления 9 и сумматора 16, интегрирующее звено 11. Формирователь величины ограничения 12 включает блок расчета модуля входной величины в заданных пределах 13, вход которого связан с выходом датчика угловой скорости по крену 2, блок усиления 14, задатчик допустимой скорости изменения управляющего сигнала 15, сумматор 16, входы которого соединены с выходами блока усиления 14 и задатчика 15.
Введение новых блоков позволяет ограничить скорость изменения управляющих сигналов в каналах курса и тангажа, что обеспечивает приоритетную отработку управляющих сигналов в канале крена. Предлагается скорость изменения управляющих сигналов в каналах курса и тангажа сделать изменяемой в заданных пределах. При этом верхний предел выбирается на основании характеристик привода ракеты, а нижний предел - на основании минимально допустимой скорости изменения управляющих сигналов в каналах курса и тангажа. Для этого в формирователе величины ограничения в зависимости от угловой скорости крена и быстродействия привода (для ракет с различными типами приводов быстродействие разное) вырабатывается величина ограничения скорости изменения управляющих сигналов в канале курса и тангажа. Располагаемая скорость вращения руля (величина постоянная) формируется в задатчике. Блок ограничения скорости изменения управляющих сигналов может быть реализован в аналоговой части автопилота и представляет собой три усилителя, а формирователь величины ограничения реализуется в цифровой части автопилота.
Данное устройство функционирует следующим образом (на примере работы автопилота по каналу курса). На основании информации, приходящей с датчиков линейных ускорений 1 и датчиков угловых скоростей, 2 блок расчета управляющих сигналов канала курса вырабатывает сигнал, который проходит через фильтрующий блок 6.1 и поступает на первый вход сумматора 8, а на второй вход сумматора 8 поступает с обратным знаком сигнал с выхода интегрирующего звена 11, с выхода сумматора 8 сигнал подается на вход блока усиления 9, на выходе которого сформирована скорость нарастания управляющего сигнала. Полученный сигнал подается на вход ограничителя скорости изменения управляющих сигналов 10, границы ограничения которого определяются исходя из значений угловой скорости крена ракеты, а именно на вход блока расчета модуля входной величины в заданных пределах 13 поступает информация из датчика угловой скорости по крену 2, далее на вход блока усиления 14 и затем по отрицательной обратной связи на вход сумматора 16, где этот сигнал суммируется с сигналом из задатчика допустимой скорости изменения управляющего сигнала 15. Результирующий сигнал и будет являться значением ограничения блока 10. Если сигнал, приходящий на вход блока 10 из блока усиления 9, будет численно меньше значения ограничения, приходящего из сумматора 16, то на выходе ограничителя скорости изменения управляющего сигнала 10 будет сигнал, равный сигналу на его входе; в противном случае, когда сигнал, приходящий на вход блока 10 из блока усиления 9, будет численно больше значения ограничения, приходящего из сумматора 16, то на выходе ограничителя скорости изменения управляющего сигнала 10 будет сигнал, равный значению ограничения. Далее на вход интегрирующего звена 11 подается сигнал с выхода ограничителя скорости изменения управляющего сигнала 10, после чего с выхода интегрирующего звена 11 сигнал по отрицательной обратной связи поступает на второй вход сумматора 8 и на сумматоры 17 и 18, 19, 20.
Аналогично вырабатывается управляющий сигнал в канале тангажа.
Из представленного материала следует, что предлагаемое устройство позволяет обеспечивать приоритетную отработку сигналов канала крена ракеты с дифференциальным управлением рулями при любых частотах изменения управляющего сигнала. Данное устройство легко реализуется при современном развитии техники.
Проведенное математическое моделирование показало, что заявленное решение является достаточно эффективным инструментом обеспечения пространственной устойчивости ракеты с дифференциальными органами управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОПИЛОТ ДЛЯ СИММЕТРИЧНОЙ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2302358C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2234725C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2291384C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ | 2012 |
|
RU2511610C1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ УПРАВЛЯЕМОЙ РАКЕТЫ, ВРАЩАЮЩЕЙСЯ ПО КРЕНУ, И АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2243494C2 |
| АВТОПИЛОТ ДЛЯ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТЫ, СТАБИЛИЗИРОВАННОЙ ПО КРЕНУ | 2005 |
|
RU2293686C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| СПОСОБ КОРРЕКЦИИ КОМАНДНОГО СИГНАЛА НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2004 |
|
RU2280233C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, РАКЕТА, ВРАЩАЮЩАЯСЯ ПО УГЛУ КРЕНА, СПОСОБ ФОРМИРОВАНИЯ ДВУХСКАТНОГО ЛИНЕАРИЗИРОВАННОГО СИГНАЛА И ПЕРЕКЛЮЧАЕМЫЙ ЛИНЕАРИЗАТОР СИГНАЛА | 2005 |
|
RU2283466C1 |
| СПОСОБ КОРРЕКЦИИ КОМАНДНОГО СИГНАЛА НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2257523C1 |
Изобретение относится к авиационным управляемым ракетам с дифференциальным управлением рулями. Применяется в авиационных катапультных устройствах и предназначено для поражения воздушных и наземных целей. Технической задачей является повышение устойчивости полета и надежности системы стабилизации. В автопилот ракеты, включающий датчики линейных ускорений и угловых скоростей, блоки расчета управляющих сигналов, фильтрующие блоки и сумматоры управляющих сигналов, дополнительно введены блоки ограничения скорости изменения управляющего сигнала в каналах курса и тангажа и формирователь величины ограничения указанной скорости, причем первый вход блока ограничения скорости изменения управляющего сигнала соединен с выходом фильтрующего блока, а второй вход соединен с выходом формирователя величины ограничения, вход которого соединен с выходом датчика угловой скорости крена, а выход блоков ограничения скорости изменения управляющего сигнала в каналах курса и тангажа соединен с сумматорами управляющих сигналов. 1 ил.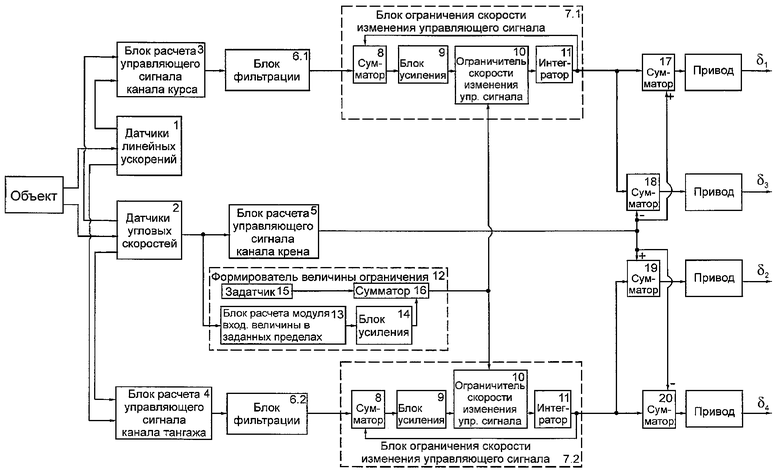
Автопилот ракеты с дифференциальным управлением рулями, содержащий датчики линейных ускорений и угловых скоростей в каналах курса, тангажа и крена, блоки расчета управляющих сигналов, фильтрующие блоки и сумматоры управляющих сигналов, отличающийся тем, что в него дополнительно введены блоки ограничения скорости изменения управляющего сигнала в каналах курса и тангажа и формирователь величины ограничения указанной скорости, причем первый вход блока ограничения скорости изменения управляющего сигнала соединен с выходом фильтрующего блока, а второй вход соединен с выходом формирователя величины ограничения, вход которого соединен с выходом датчика угловой скорости крена, а выход блоков ограничения скорости изменения управляющего сигнала в каналах курса и тангажа соединен с сумматорами управляющих сигналов, блоки ограничения скорости изменения управляющего сигнала состоят из сумматора, блока усиления, ограничителя скорости изменения управляющего сигнала и интегрирующего звена, входы сумматора блока ограничения скорости изменения управляющих сигналов соединены с выходом фильтрующего блока и по отрицательной обратной связи с выходом интегрирующего звена, при этом вышеупомянутый формирователь величины ограничения состоит из задатчика допустимой скорости изменения управляющего сигнала и последовательно расположенных блока расчета модуля входной величины в заданных пределах, блока усиления и сумматора, входы которого соединены по отрицательной связи с выходом блока усиления и с выходом указанного задатчика.
| СВЯТОДУХ В.К | |||
| Динамика пространственного движения управляемых ракет | |||
| - М.: Машиностроение, 1969, с.80, рис.2.7 | |||
| АВТОПИЛОТ ДЛЯ САМОНАВОДЯЩИХСЯ РАКЕТ | 1976 |
|
SU1840520A1 |
| АВТОПИЛОТ ДЛЯ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТЫ, СТАБИЛИЗИРОВАННОЙ ПО КРЕНУ | 2005 |
|
RU2293686C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ | 1984 |
|
SU1839988A1 |
| Способ восстановления сухих молочных продуктов | 1981 |
|
SU1050635A1 |
| US 2005056730 A1, 17.03.2005. | |||

