Всякая электромеханическая схема взаимной замкнутости, применяемая к механическим подъемникам, должна удовлетворять следующим требованиям: гарантия полной безопасности движения; дешевизна устройства и эксплоатации; простота конструкции и установки; возможность применения к любой конструкции механического подъемника; возможность использования любого вида тока, имеющегося в распоряжении, без изменения конструкции; выключение действий подъемника при перерыве питающего тока. Предлагаемое изобретение имеет целью дать устройство, удовлетворяющее вышеуказанным требованиям.
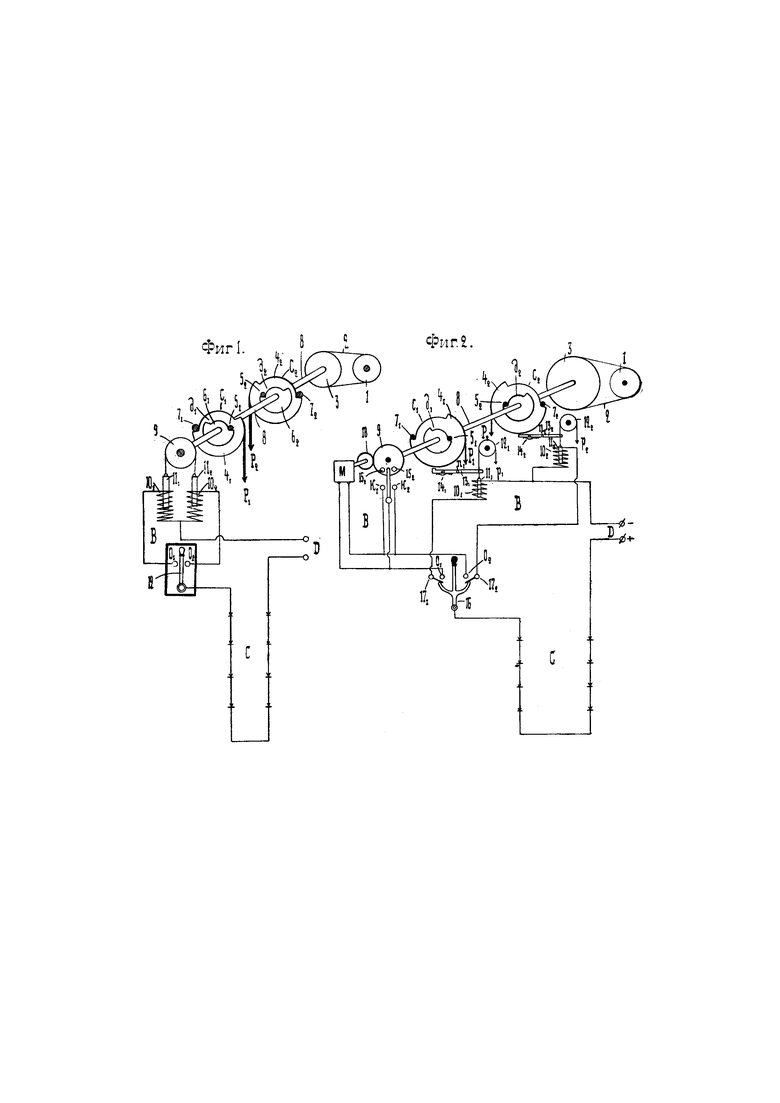
На фиг. 1 схематического чертежа изображено предлагаемое устройство, а на фиг. 2 - его видоизменение.
На валу 8 свободно насажены шайбы - 41 и 42, снабженные вырезами С1 и С2; эти шайбы опираются границами своих вырезов в неподвижные упоры - 71 и 72 и нагружены посредством канатной или цепной связи грузами Р1 и Р2. На шайбах 41 и 42 имеются упоры 51 и 52. С той же осью 8 шпонками связаны диски 61 и 62, снабженные вырезами д1 и д2, грань которых упирается в упоры 51 и 52 шайб 41 и 42. Кроме того, на оси 8 на шпонках насажены диск 9 и шестерня 3 для цепи Галля. Электрическая часть схемы состоит из двух цепей: цепи управления В и цепи взаимной замкнутости. В цепь управления входят два соленоида 101 и 102, сердечники 111 и 112 которых связаны цепной или канатной связью с диском 9 механической части схемы, и контакта управления 01 и 02 с рычагом 12. В цепь взаимной замкнутости входят все контакты, необходимые для взаимной замкнутости - дверные, концевые и проч. Ток в обе цепи поступает через борны D. Цепное колесо 3 связано цепью Галля и цепным колесом 1, насаженным на вал управления, механизмом подъемника, вместо канатного шкива управления. Пусть, примерно, вся электромеханическая схема находится в положении, указанном на фиг. 1 и цепь находится под напряжением; кроме того, рукояткой 12 замыкается ток на контакт 01 причем все контакты цепи С замкнуты. Тогда ток пройдет через соленоид 101, сердечник 111 которого будет втянут и, следовательно, повернет за диск 9 вал 8, а с ним шайбу 41 поворачиваемую диском 61 за упор 51, и шайба 41 подымет груз Р1; одновременно повернется и шестерня 3, которая за цепь 2 повернет колесо 1; таким образом, будет переведен соответствующий ремень механизма подъемника, и кабина последнего двинется в соответствующую сторону. Как только рукоятка 12 будет возвращена в исходное положение, ток выключится, сердечник 111 соленоида 101 станет свободным, и груз Р1 повернет вал 8 в обратную сторону, и ремень передачи подъемника станет на холостое положение - подъемник остановится. При первом движении вала 8 будет вращаться и диск 62, но, вращаясь от упора 52, он не повернет шайбу 42, которая останется неподвижной на постоянном упоре 72. При движении рукоятки 12 на контакт 02 произойдет вышеописанное движение схемы по отношению к системе 42, 52, 62 и 72 и в обратную сторону; при этом будет переведен на рабочий ход другой ремень, и кабина подъемника получит движение в другую сторону. В конечных пунктах движения кабины подъемника рукоятка 12 ставится механически в среднее положение упорами (вне кабины установленными, не показанными на чертеже) таким образом, чтобы эта рукоятка могла иметь движение только в нужную сторону, т.-е. в нижнем положении - на подъем, а в верхнем - на спуск. Так как все контакты цепи С включены последовательно с контактами управления 01 или 02, то разрыв любого контакта или просто разрыв цепи, или прекращение в цепи тока при движении подъемника повлечет за собой остановку действий подъемника, ибо это равносильно разрыву тока контактами 01 или 02. В случае умышленного перевода рукоятки 12 из одного положения в другое, один из соленоидов будет действовать в согласии с несоответствующим грузом, т.-е. будет совершаться согласное действие: сначала перевод на холостой ход, а затем на рабочий, соответствующий новому положению рукоятки 12. В случае действия любого из контактов цепи С и во время хода кабины, например, при открытии двери и замыкании этого контакта, напр., при закрытии открытой ранее двери, кабина снова пойдет, если успеет остановиться, в прежнем направлении, если при этом во время остановки рукоятка 12 не будет переведена в среднее положение. При быстром размыкании и последующем замыкании контакта цепи С, перевод ремней не будет произведен (не успеет), и кабина подъемника будет продолжать двигаться.
Все электромеханическое устройство, схематично представленное на чертеже, может быть приключено к управлению любого механического подъемника; надлежит лишь подобрать соответствующую передачу от вала устройства к валу управления, что достигается соответствующим подбором шестерен 1 и 3. Контакт управления помещается в кабине подъемника, и к нему подходят три провода. Цепь С имеет обычное устройство цепи взаимной замкнутости электрических подъемников. Схема питается любым током, имеющимся в распоряжении, например от освещения. При движении подъемника без проводника, контакт управления помещается в машинном отделении и приводится в движение по этажам, как обычно, канатом управления.
Для случаев, когда нежелательно применять для действия соленоиды, а желательно применить электро-мотор, предлагается видоизменение согласно схемы по фиг. 2, где аналогичные части схемы обозначены знаками, одинаковыми с фиг. 1-ой. Дополнительно вводятся: мотор М, контакты (выключатель мотора) К1 и К2, упоры 151 и 152 на диске 9, защелки 131 и 132 с пружинными собачками 141 и 142, качающимися на осях n1 и n2, для шайб 41 и 42, эти защелки соединены с грузами р1 и р2 и соленоидами 101 и 102, гибкие связи грузов р1 и р2 примкнуты через шкивы 121 и 122, и введены дополнительные контакты у рычага управления 16, 171 и 172. Мотор М соединен с диском 9, который в данном случае снабжен зубчатым ободом, помощью зубчатки 18.
Предполагается, что вся схема находится в положении, указанном на фиг. 2, и что цепь находится под напряжением. При включении рычага управления 16 на контакт 01 - одновременно замыкается контакт 171, мотор приходит в движение и поворачивает диск 9, и схема работает, как ранее указанная; кроме того, включается соленоид 101, сердечник которого за гибкую связь прижимает защелку 131 к шайбе 41. При повороте вала 8 на нужный для действия подъемника угол, одновременно включается мотор М замыканием контакта К1 упором 151 и заскаскивает собачка защелки за вырез C1. В случае размыкания любого контакта в цепи, груз p1 отжимает защелку 131, и груз р1 возвращает схему в первоначальное положение. То же произойдет и при разрыве тока в цепи вообще или прекращения тока. В случае оставления рукоятки 16 в поставленном ранее положении, при замыкании разомкнутого контакта, снова переводится схема в то положение, которое предусмотрено положением рукоятки 16. Совершенно аналогична работа схемы будет при включении рычага 16 на контакт 02; при этом схема будет работать в обратную сторону, и действовать будет соленоид 102.
1. Предохранительное электромеханическое устройство для механических подъемников, характеризующееся совокупным применением: а) вала 8 (фиг. 1), связанного цепной или иной передачей 1-3 с валом управления или переводом и снабженного соединенными с ним дисками 61 и 62 с вырезами д1, д2, образующими выступающими частями - захваты для упоров 51, 52 шайб 41, 42 с грузами Pl, Р2, свободно сидящих на валу 8 и также снабженных вырезами С1, С2 для стопоров 71, 72 и б) соленоидов 101, 102 с сердечниками 111, 112, соединенными при посредстве гибкой связи и шкива или диска 9 с валом 8, каковые соленоиды посредством ручки или рычага 12 и контактов 01, 02 включаются и выключаются - с целью остановки и изменения направления вращения вышеуказанного вала 8, а следовательно и вала управления или перевода, и соединения с питаемой током через борны D цепью С, располагаемою в шахте и в которую включены контакты взаимной замкнутости, при нарушении коей поворот вала 8 производится грузом P1 или Р2.
2. Видоизменение охарактеризованного в п. 1 устройства, отличающееся присоединением мотора М (фиг. 2), связанного с вышеуказанным диском 9, снабженным упорами 151, 152 для приведения в действие контактов К1, К2 и выключения мотора, при повороте, для действия подъемника, на нужный угол вала 8, шайбы 41 или 42 коего при этом захватываются пружинными защелками 131 или 132, управляемыми соленоидами 101, 102 и находящимися под влиянием грузов р1, р2, при чем управление производится рычагом 16 при посредстве контактов 171 и 172.
