1
По основному авт. св. № 259345 известно устройство для дискретного пе|ремещения рабочих органов.
Предлагаемое устройство отличается от известного тем, что его диодная матрица выполнена с Л1рямыми ,и инверсными выходными шинами, к .которым подключены катушки двухобмоточных поляризованных реле с магнитным салюудержанглем контактов, коммутирующих эле ктро м а лниты д в у хпозиционн ы х рев ер с ных гидрораснределителей. Это обеснечивает повышение быстродействия ввода информации.
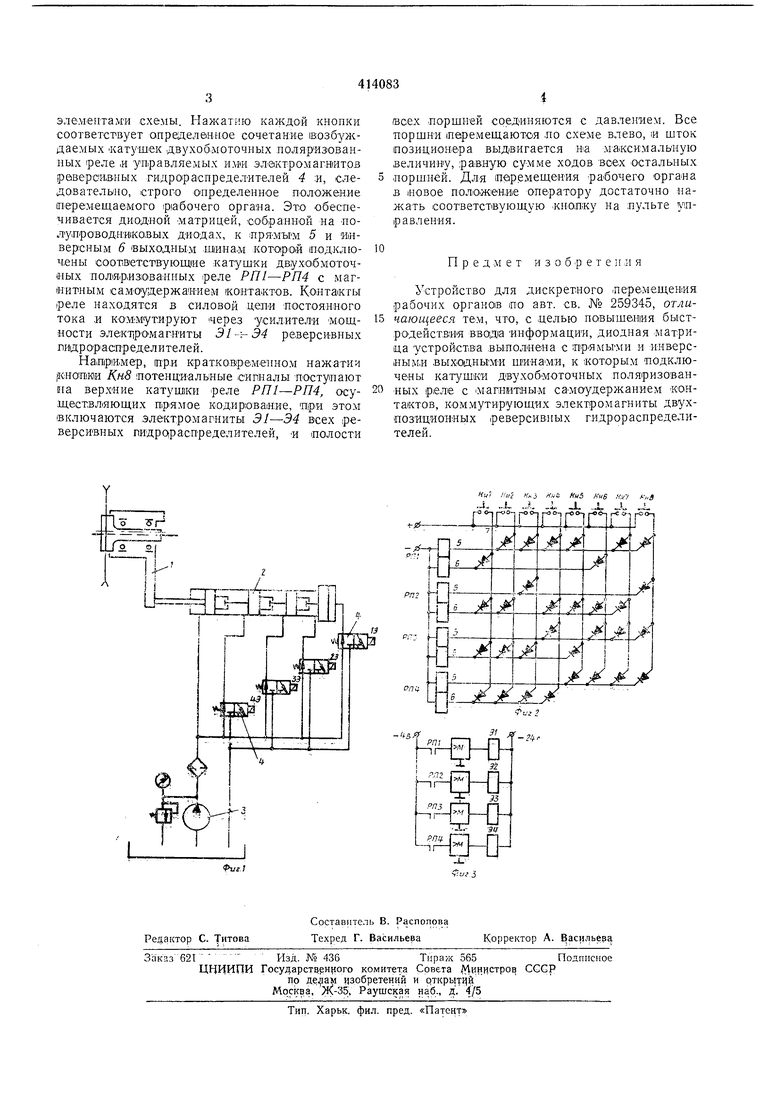
На фиг. 1 изображена гидравлическая схемВ предлагаемого устройства; «а фиг. 2 - диодная матрица; на фиг. 3 - орииципиальная электрическая схема.
Пильный суплорт 1 соединен с гидра1вличеоким позиционером 2, «оторый имеет несколько .ПОДВИЖНЫХ поршней. Ход первого поршн1я ограничивается длиной расточки в кар.нусе .и определяет дис.к ретность. Ход каждого последующего .поршня ограничивается Ш1Ю1К.ОМ .предыдущего и кратен един1ично1му ходу ноз;ициоеера. Штаковая полость позиционера постоянно сообщена с напорной малистралью лидросистамы, питаемой насосом 3. Поэтому каждый поршень и.меет всего д.ва устойчивых состояния, в зависимости от того, соединена соответствующая межпоршневая камера позиционера с давлеПием (кодовая команда «1) или со сливом (.кодо.вая команда «О). Ход выходного штока позиционера, выполнен.ного заодно с последни.м ИОршнем, складывается из суммы ходов отдельных поршней. Для соединения соответ-ствующих межпоршневых камер .позиционера с напорной или сливной магистралями гидросистемы использованы двухпозицио.нные ревераИЕНые гидрораспределители 4 с электрическим управлением от электромагнитов постоянного тока. Благодаря этому управление величиной пе1ремещения щтока позиционера сводится к включению определенной а амбинаци)1 электро.магнитов реверсивных пидрораспределителей, 4HCvTo которых равно числу подвижных пор.щней. Это осуществляется с помощью диодной Матрицы, прямые 5 и инверсные 6 выходные шины которой через разделительные диоды подключены к В.ходным шинам 7. При обесточе.нном электро магните (кодОВая команда «О) плунжер гидрораспреде.т«теля возвращается пружиной в исходное положение, соеДИН.ЯЯ соответствующую 1межпорщневую ка.меру позиционера со сливОМ.
Устройство работает следующим образом.
Необходимое дискретное положение рабочего органа задается операторОМ нажатием соответствующей кнопки Юн-К.н8 на пульте упра.влеиия. Все кно.пки имеют за.мыкающие контакты, являющиеся воспринимающими
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дискретного позиционирования рабочих органов | 1981 |
|
SU954215A1 |
| УСТРОЙСТВО для ДИСКРЕТНОГО ПЕРЕМЕЩЕНИЯ РАБОЧИХ ОРГАНОВ | 1970 |
|
SU259345A1 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ И УСТАНОВКИ ПИЛ | 1971 |
|
SU315594A1 |
| Позиционный привод рабочего органа деревообрабатывающего станка | 1985 |
|
SU1253776A1 |
| СПОСОБ И УСТРОЙСТВО (ВАРИАНТЫ) ДЛЯ СТАБИЛИЗАЦИИ ПОЗИЦИОНЕРА КЛАПАНА ВО ВРЕМЯ ИСПЫТАНИЙ ЭЛЕКТРОМАГНИТНОГО КЛАПАНА | 2017 |
|
RU2752213C2 |
| СПОСОБ ПРОВЕДЕНИЯ ИСПЫТАНИЯ ЭЛЕКТРОМАГНИТНОГО КЛАПАНА И СООТВЕТСТВУЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2017 |
|
RU2752786C2 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ДИСКРЕТНЫХ СИГНАЛОВ В ЛИНИЮ СВЯЗИ | 2006 |
|
RU2313914C1 |
| Универсальный калибратор тока | 1985 |
|
SU1308969A1 |
| Устройство для установки пил на размер в обрезных станках | 1973 |
|
SU458434A1 |
| Устройство для передачи информации | 1984 |
|
SU1236532A1 |
