Изобретение относится к области строительной техники и может быть использовано в грузоподъемны.х машинах с телескопическими стрелами с рабочим органом на конце, например монтажной плондадкой.
Известны следяодие устройства для рабочих органов телескопических стрел грузоподъемных манлин, содержащие барабаны, на которых закреплены концы ветвей каната, огибающего блок, жестко закрепленный на оси рабочего органа, шарнирно смонтированного на конце стрелы, и промежуточные отклоняющие блоки, установленные на оси поворота стрелы.
Недостаток известпого устройства состоит в том, что в момен слежения за рабочнм органом ветви каната во время выдвижения звеньев стрелы изменяют свое положение относительно отклоняющих блоков, сидяпдих на оси поворота, в результате чего их натяг оказывается выще или ниже оптимального.
С целью ликвидации натягов и люфтов в канате барабаны предлагаемого устройства смонтированы на оси-винте с шагом резьбк, равным шагу намотки ветвей каната.
На фиг. 1 и 2 изображена кинематическая схема предлагаемого устройства в двух проекциях.
Барабаны i и 2 слежения смон1ированы на неподвижной оси 3, выполненной в виде випта с шагом, равным шагу намотки ветвей 4 и 5
следящего каната. К торцам барабанов слежения жестко прикреплены шестерни 6 и 7, находящиеся в ностоянном зацеплении с шестернями 8 и 9 механизма выдвижения звеньев телескопической стрелы.
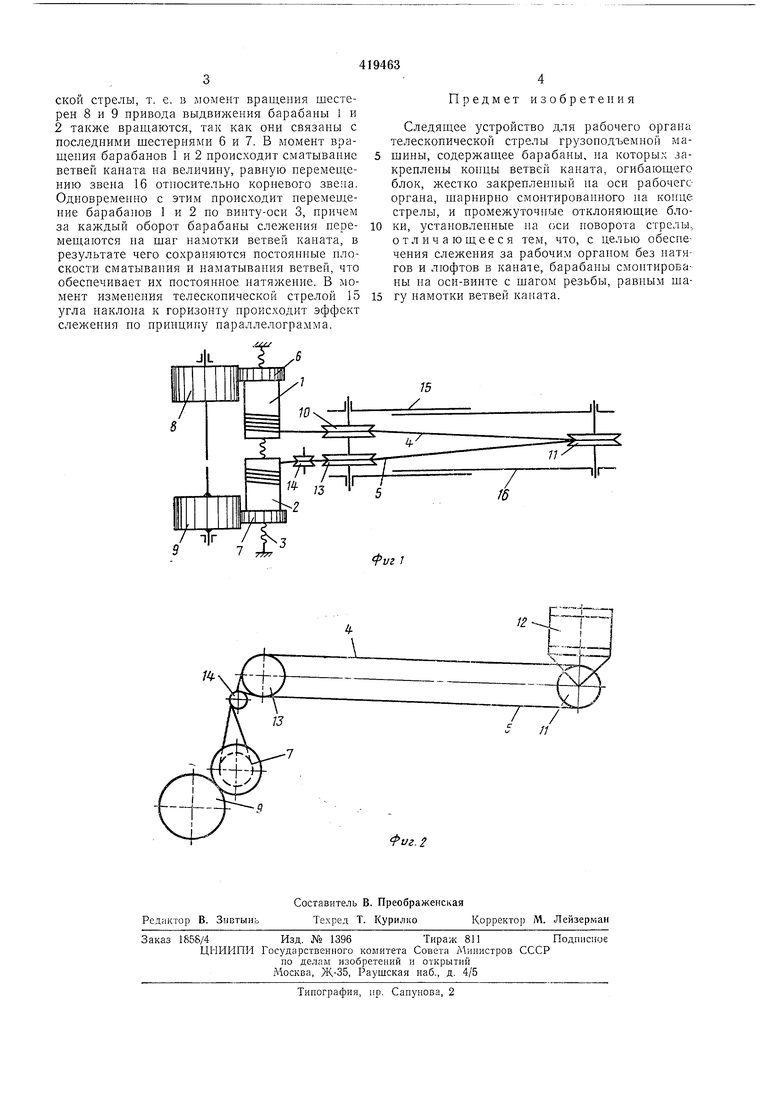
На барабане 1 слежения закреплен конец ветви 4 каната, которая, сходя с барабана, проходит через отклоняющиГ блок 10, сидящий в постоянной вертикальной плоскости на
оси поворота телескопической стрелы. Далее она огибает блок II, жестко закрепленньп на оси шарнирной подвески моитажно: люльки 12, после чего нижняя ветвь 5 капата подходит к отклоняющему блоку 13, также сидящему на оси поворота телескопической стрелы, при этом ветвь 5 прижимается к блоку 13 блоком 14. Конец ветви 5 следящего каната закреплен на барабане 2. В момент огибания блока 11 ветви 4 и 5 каната надежно закренлены на нем.
Параметры барабанов 1 и 2, блока 11 и передаточное число между приводом выдвижения телескопической стрелы 15 и барабанами выбраны таким образом, что линейные скорости сматывания и на.матывания ветвей каната равны соответственно скорости выдвижения и возврата в исходное положение звена 16 телескопической стрелы, в результате чего ветви 4 и 5 всегда имеют оптимальное натяжение,
В момеит выдвижения звена 16 телескопиче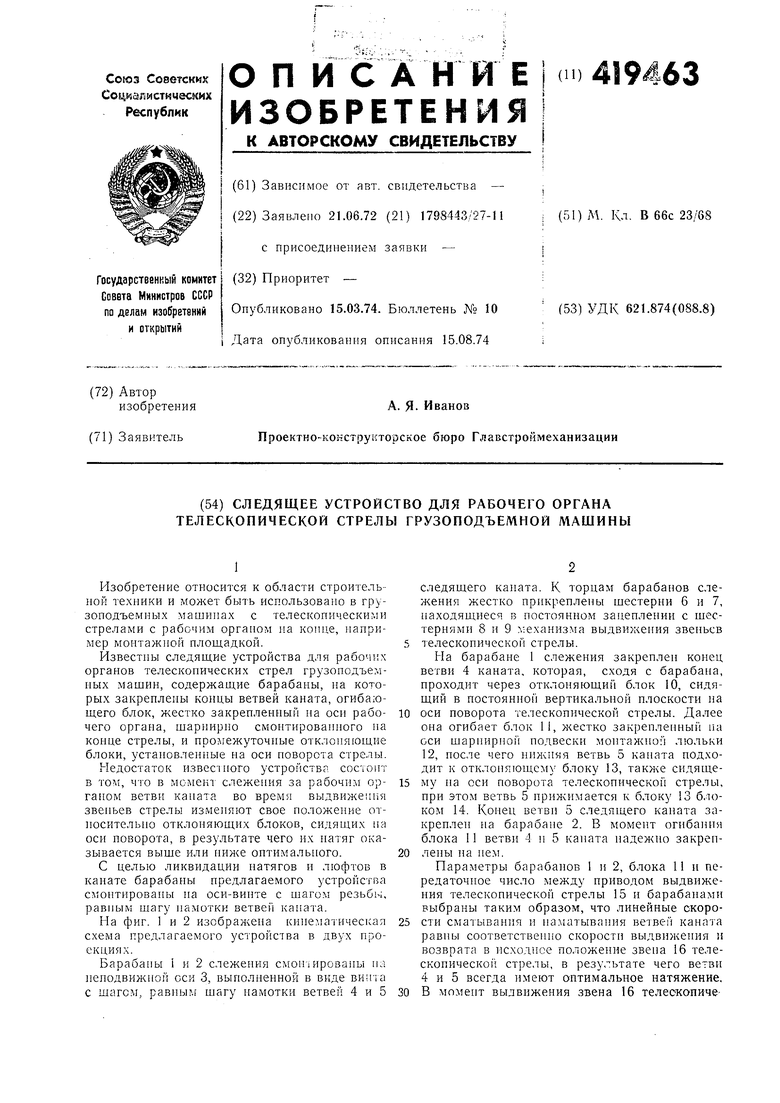
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящее устройство для рабочего органа телескопической стрелы грузоподъемной машины | 1977 |
|
SU663658A1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1973 |
|
SU391990A1 |
| ПРИВОД УГОЛЬНОЙ ПИЛЫ | 1992 |
|
RU2065044C1 |
| БАШЕННЫЙ КРАН | 1967 |
|
SU206044A1 |
| ТРАКТОРНЫЙ ПОГРУЗЧИК | 1966 |
|
SU222950A1 |
| Подвесной кран | 1971 |
|
SU598834A1 |
| УСТРОЙСТВО ПРИНУДИТЕЛЬНОГО СЛЕЖЕНИЯ ДЛЯ МОНТАЖНЫХ ГИДРОПОДЪЕМНИКОВ | 1971 |
|
SU315688A1 |
| Телескопический ленточный конвейер | 1976 |
|
SU745796A1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |
| Самоходная канатно-скреперная установка | 1982 |
|
SU1023035A1 |
