Предлагаемое изобретение относится к гцроскопам, в особенности к гироскопам, приводимым в движение воздухом и свобедным, т. е. имеюшим три степени свободы.
Гироскопы этого типа общеизвестны и приыером их может служить дирекционный гироскоп, применяемый для регулирования движения мин и летательных аппаратов, а на последних и в качестве указателя направления взамен компаса и курсоуказателя или в дополнекие к ним. В обычном выполнении гироскопы этого типа состоят из ротора, вращающегося на оси, несушей ротор рамки, в которой монтированы цапфы ротора, и из вертикального кольца. Рамка ротора гак монтирована в вертикальном кольце, что может поворачиваться вокруг оси, лежащей в той же плоскости, что и волчковая ось ротора, но перпендикулярно к этой оси , причем вертикальнее кольцо поворачивается, в свою очередь, вокруг оси, лежащей в той же плоскости, что и ось рамки ротора, но перпендикулярно к ней. Ротор гироскопа может приводиться в движение струями воздуха из сопел, направляюших воздух на выполненные на окружности ротора лопасти.
Компасы, магнитный и индукционный, оказываются удовлетворительными лишь при прямом курсе, но при поворотах или при быстром повышении скорости воздушного аппарата и при маневрировании его, они становятся практически бесполезными; свободный же гироскоп сохраняет свое направление независимо от маневрирования. ОднакЪ, до сего времени применение свободных гироскопов на самолетах оставалось ограничен-яым в виду того, -ЧТО гироскоп сохраняет свое
направление в течение всего нескольких минут Одна из главных причин девиации заключается в том, что такие гироскопы стремятся, вследствие враш.ения земчи и 1;екоторых других причин, принять положение, наклонное.к горизонту, а потому, лосле сравнительно короткого промежутка времени, утрачи1ают свою ценность как указатели упрагления. Кроме того, по тем же причинам, в 6ojbmHHCTBe географических широт сьободные гироскопы показывают рассеиьакне в азимуте.
В Еиду этого предлагалось механически центрировать гироскоп при помощи колпака для периодическсй перестановки его. Однако, такое приспособление, управляемое обычно от руки, требует некоторого обслуживания и временно лишает гироскоп его значения, как указателя направления.
Целью предлагаемого изобретения является приспособление, автоматически поддерживающее Еолчковую ось гироскопа в практически горизонтальком положении и неподвижной в азимуте относительно земли, не нарушая его азимутального положения.
Хотя предлагаемое изобретенке предназначается, главным образом, для гироскопов, прнЕОдимых в движение воздухом, но его можно применять и для других типов гироскопов с тремя и менее степенями свободы, пригодимых в движение другим способом.
В одной из своих форм выполнения предлагаемое изобретение можно рассматривать как дирекционный гироскоп, снабженный приспособлением для создания крутяш.его момента вокруг,
При наклонении же гироскопа в про ЕОПоложноы направлении струя из нижнего сопла вызывает противоположно напраЕленный враихнющий момент вокруг той же оси на рамке гироскопа. Таким образом, на гироскоп действует Еыпрямляющее усилие вокруг оси, перпендикулярной к наклону, что вызовет прецессию и нозвратит гироскоп в вертикальное положение. Планка 55, пвЕорачивающаяся вокруг оси 52 гироскопа, оказывает сходное действие, так что выпрямляющий врашающий момент получается на гироскопе при опрокидывании последнего вокруг любой из обеих горизонтальных осей.
Предмет патента.
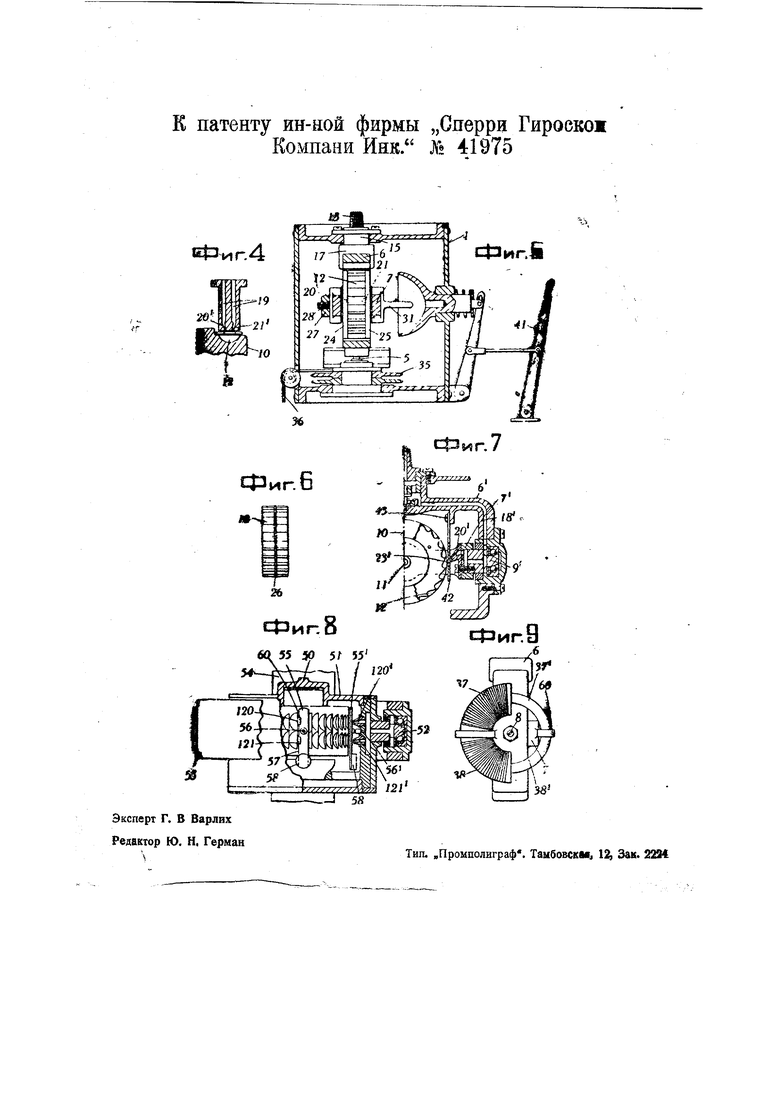
1. Гироскопический компас с воздушным приводом и с приспособлением для образования вращающего момента около оси гироскопа, отличающийся тем, что приспособление для образованна вращающего момента заключает в себе пару тесно примыкающих друг к другу воздушных сопел 20, 21, 120, 121 расположенных аксиально но окружности ротора 10 и по обе стороны от центральной линии опоры рамки 1, несущей ротор, а также содержит либо перегородку 22 между соплами и ротором, служащую для уменьщения эффективности одной из струй путей прикрытия ее при относительном наклоне рамки, несущей ротор, и вертикального кольца 6, либо лопасти 12, установленные по окружности ротора, идущие только частично поперек поверхности ротора-, с образованием стенки 24, 25 вокруг ротора у каждого наружного конца последнего, с целью воздейстьия при относительном наклоне.рамки, несущей ротор, и вертикального
кольца, движущимся воздухом на окружнук стенку, на предмет получения в обоих случаях при относительном наклоне желательного вращающего момента.
2.Форма выполнения гироскопического компаса по п. J, отличающаяся тем, что ротор снабжен одной окружной стенкой 26 (фиг. 6), расположенной между 1 аружными концами ротора, а в плоскости этой- стегки установлено однатолько воздущное сопло, с целью воздействий при относительном наклоне упомянутой стенки и; сопла, движущимся воздухом на одну сторону стенки, для достижения желательного вращающего момента.3.Видоизменение гироскопического компасаг по п. , отличающееся тем, что перегородка установлена на рамке, несущей ротор, а со-пло - на вертикальном кольце или наоборот, причем перегородка снабжена отверстиями для пропуска воздушных струй в течение времени, когда рамка, несущая ротор, остается неотклоиенной от нормального положения но отнощению к вертикальному кольцу.
4.Форма выполнения гироскопического комг паса по п. 3, отличающаяся тем, что перегородка подвещена. по способу маятника на вертнкальном кольце.
5.Видоизменение гироскопического компаса по пп. 1-4, отличающееся тем, что в случае применения ротора с вертикально вращающейся осью Еоздущные сопла предназначены действовать налопасти, расположенные по окружиости ротора ниже и выще плоскости горизонтальных осей опрокидывания, с целью получения при; наклоне гироскопа выпрямляющего вращающеко. момента.
больше чэм на несколько градусов, и таким образом всегда удерживающее его в положении, наиболее обеспечивающем максимальное дирекционное действие и минимальные нарушения при -угловом перемещении вокруг продольной или поперечной оси самолета.
Если ротор выполнен согласно фиг. 6, то можно применить одну струю, так направленную, что она встречает центральную стенку 26, которая разделяет ее на две части, иока гироскоп остается в вертикальном Г1олон ении, на ротор действует ТОЛЬКО вращающий момент, вызывающий вращение ротора, но при относительном наклоне ротора и вертикального кольца действует на одну из боковых сторон центральной :тенки 26, подобно тому, как она действз ет на боковые стенки 24, 25 (фиг. 5).
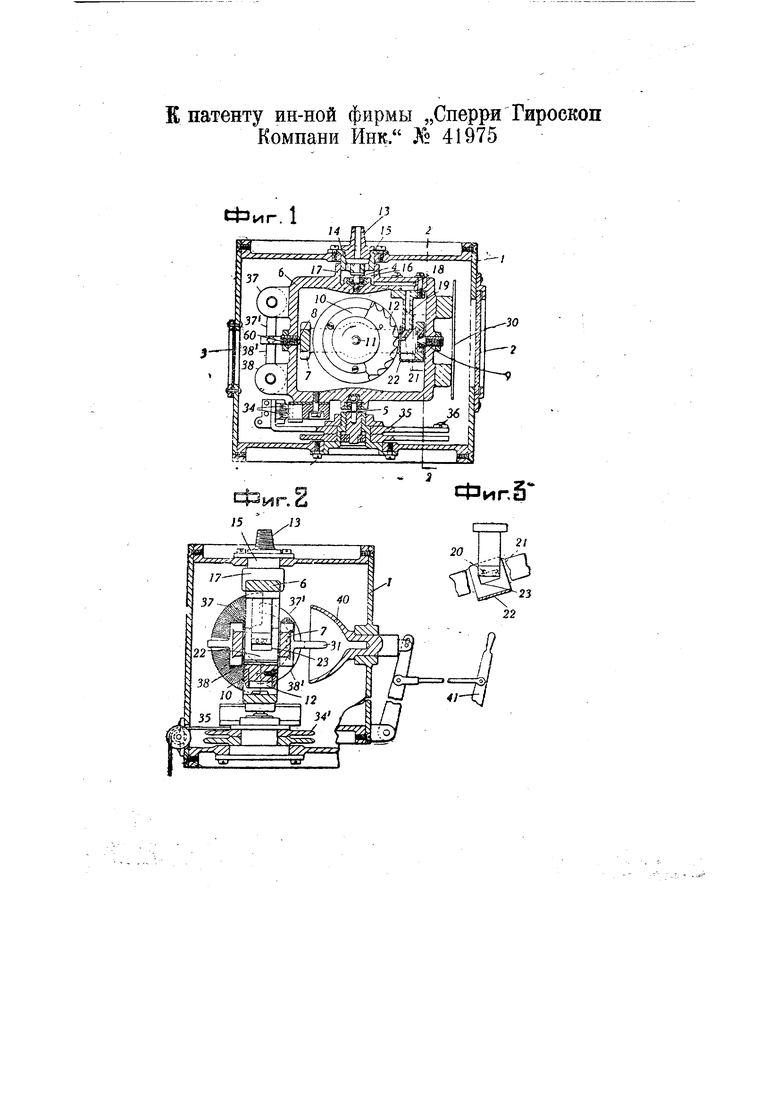
Для того, чтобы вращение земли не вызывало отклонений в азимуте, на отходящий от рамки 7 стержень 28 можно навинтить переставной i руз 27 фиг. 5Х. Пересганавливая этот груз соответственно географической широте, можно устранить девиацию из-за указанной причины.
образом, предлагаемое изобретение дает яирекционный гироскоп, сохраняющий направление в течение сравнительно долгого времени и в то же время обладающий тем прэимушеством, что рн продолжает работать в таких условиях, в которых магнитный и индукционный компасы становятся бесаолезньши, а именно: при быстрых поворотах, повышении скорости и при других маневрах
Когда гироскоп останавливают, его можно запереть при помощи колоколообразного колпака 40, находящего на центрирующий штифт 31 яа горизонтальном кольце. Колпаком можно управлять от руки, например, при, помощи рычага 41 (фиг. 2).
Предлагаемый гироскоп можно применять либо в качестве указателя направления, либо в качестве базиса для автоматич;ского управления летательным аппаратом. В последнем случае, на основании гироскопа монтируют контрольные кнопки, работающие совместно с троллеями 34 на поворотном плече 35, передающем движение при ПОМОШ.И троса 36.
Для перемены курса или для корректирования положения гироскопа, если он отклоняется, можно применить пару электромагнитов 37, 38 (фиг. 1, 2- и 9), монтированных на вертикальном кольце. Дугообразные сердечники 37, 38 электромагнитов прикреплены к отходящему от рамки 7 плечу 60 (фиг. 9). Возбуждение одного из этих магнитов дает вращающий момент в том или другом направлении вокруг горизонтальной оси тироскопа, что вызывает прецессию последнего в азимуте и тем корректирует гироскоп.
Предмет изобретения, выполненный в форме, показанной на фиг. 1, 2, 3 и 4, особенно пригоден для применения в качестве аппарата-, указывающего направление для самолетов, нормально «овершающих полеты по прямому курсу и с равномерной-скорсстью. Если, однако, дирекционный гиросйоп должен указысать направление на быстро мангврирующем самолете, вертикальное кольцо может не оказаться наиболее выгодным для определения относительного наклонения гироскопа из-за виража, боковой и килевой качки. Очевидно также; что . монтировка сопел и перегородки может быть и обратной, т. е. сопла можно монтировать на горизонтальной рамке 7. а перегородку-на нертикальном элементе (фиг. 7). В данном случае для поддержания вертикального по-ожения применяется независимый маятник 42; поворотно монтированный на вертикальном кольце, причем ось 43 расположена выше оси 8-9 рамки 7, но параллельно ей. Этот маятник можег, следовательно, сохранять вертикальное положение при наклоне рамки 7. но поворачиваться вокруг вертикальной оси может только вместе с вертикальным кольцом 6. На фиг. 7 маятник показан занимающим место перегородки 22 (фиг. ,1), но так как маятник может сохранять вертикальное положение, то пару воздушных сопел 20 необходимо, в эт(Ьм случа;, монтировать на горизонтальной рамке 7i. Для этой цели канал 18 в вертикальном .кольце ведет в полую цапфу оси 9, а оттуда к сопла 20. Сопла расположены по обе стороны от вертикальной центральной плоскости цанфоси8-9, а вырез 23 в маятниковой перегородке расноложен, как описано |выше, и снабжен краем, рассчитанным на отсочку одной из сгруй при относительном наклонении кольца и маятника. Очевидно, что в этом случае, как и при выполнении по фиг.,1, получится вращающий момент вокруг ьертикальной оси гироскопа.
Общая идея предлагаемого изобретения может быть применена и к свободным гироскопам других типов, которые желательно сделать сохраняющими вертикальное или горизонтальное положение, не превращая их в маятниковые. На фиг. 8 показано применение предлагаемого изобретения для гироскопического прибора с целью определения искусственного горизонта. Такой .гироскоп поддерживался, обыкновенно, на нормальной вертикальной волчкоюй оси 50, в рамке или кожухе 51, подвешенном в подвзсе 53 и могущем колебаться вокруг горизонтальной оси 52. Подвес 53 монтирован, в свою очередь, для вращения вокруг перпендикулярной к горизонтальной оси неподвижной опоре 54. Для привода ротора предусмотрена пара или, предпочтительно, две пары болел 120, 121 и 120, 12Г; сопла каждой пары расположены одно над другим но обе стороны от оси 52, кожуха 51 и оси подвеса на равном расстоянии от нее. Благодаря этому сопла наклоняются вместе с гироскопом. Б качестве вертикального поверочного приспособления имеются вертикальные планки 55, 55, поворачивающиеся на осях 56. 56, расположенных на одной линии с осью цапф гироскопа и по одну сторону от вертикальной линии, соединяющей сопла. Край 57 этих лопастей расположен предпочтительно тангенциально к окружности сечения сопел и планки выполнены маятниковыми, например, при помощи грузов 58. Кран 57 можно близ каждого сопла срезать, чтобы струи в том месте, где они проходят мимо планки, были ближе к осевой линии гироскопа н действовали на промежутки между лопастями ротора по этой линии. . чевидно, что при наклонении кожуха гироскопа в направлении часовой стрелки (фиг. 8) струя из ерхнего сопла 120 будет пересекать планку и ем вызовет на ней вращающий момент вокруг си, перпендикулярной к оси планки или, друими словами, вокруг оси подвеса 54, причем тот вращающий момгнт передается через-ось 56.
к патенту ин-яой фирмы „Сперри Гироскож Компани Инк. № 41975
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 1932 |
|
SU38555A1 |
| ГИРОСКОПИЧЕСКИЙ КОМПАС | 1932 |
|
SU38554A1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2241957C1 |
| ГИРОСКОПИЧЕСКИЙ УКАЗАТЕЛЬ ОТКЛОНЕНИЯ ДВИЖУЩЕГОСЯ ТЕЛА ОТ ПРИНЯТОГО НАПРАВЛЕНИЯ | 1927 |
|
SU12284A1 |
| НАЗЕМНЫЙ ГРАВИМЕТРИЧЕСКИЙ ДАТЧИК ИСТИННЫХ АЗИМУТОВ И УГЛОВ ОТКЛОНЕНИЯ ЕГО СИСТЕМЫ КООРДИНАТ ОТНОСИТЕЛЬНО ВЕКТОРА СИЛЫ ТЯЖЕСТИ | 2004 |
|
RU2260176C1 |
| ВЙВЛЙОТЕГСА | 1966 |
|
SU184465A1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2239159C1 |
| ГИРОСКОП АДАПТИВНОГО РОБОТА НОВИНЬКОВА | 2001 |
|
RU2221689C2 |
| Гиромагнитный компас | 1940 |
|
SU67806A1 |
| Гироскопическое устройство | 1958 |
|
SU120343A1 |
Е|3иг.4
60 55 30 5t $5
/
-1 58
Эксперт Г. В Варлих Редактор Ю. Н. Герман
Тип. „Промполиграф. ТаыбовскШ, 12, Зак. 22М

