Изобретение относится к производству изделий с поверхностями произвольной кривизны, подлежащих точечной обработке (сверлению, простановке и расклепыванию заклепок, точечной сварке и т.п.).
Известен адаптивный "Пневмогидравлический робот" по а.с. СССР 574292, содержащий гироскоп.
Известный гироскоп содержит три гироскопические оси - главную ось чистого вращения, обращенную в исходном положении фронтально к наибольшей проекции траектории слежения в декартовом пространстве, основную (вертикальную) ось прецессий, или ось широтного слежения, и перпендикулярную ей дополнительную (горизонтальную) ось нутаций, или ось меридионального слежения, - а также четвертую ось - наклонения технологического механизированного инструмента нормально к касательным изгибов траектории точек обработки изделия. Каждая ось снабжена самостоятельным поворотным приводом с тормозным устройством, с угловыми и фазовыми датчиками угла поворота. Углы поворотов частей гироскопа задаются тактильными щупами (например, по а.с СССР 1109287, МПК, кл. B 23 K 11/10 "Датчик системы управления клещами для контактной точечной сварки"), расположенными впереди и сзади технологического инструмента по ходу вдоль траектории слежения. Предусмотрено изменение положения основной оси (прецессии) с вертикального на горизонтальное, когда главная ось чистого вращения в начальном положение обращена к горизонтальной наибольшей проекции траектории слежения. Начальным названо положение, при котором все оси гироскопа параллельны или перпендикулярны осям декартова пространства.
Недостатком известного гироскопа является то, что его оси показаны схематично, нет конструктивных признаков компоновки гироскопа и взаимного расположения его частей. Не предусмотрено автоматическое изменение положения оси прецессии с вертикального на горизонтальное.
Предлагаемый гироскоп не имеет указанных недостатков.
Техническим результатом является автоматическое удержание нормали, проходящей через осевой механизированный инструмент перпендикулярно к касательным изгибов отслеживаемой траектории точек обработки изделий произвольной кривизны, чем гарантируется качество обработки.
Это достигается тем, что гироскоп адаптивного робота, встроенный в его манипулятор, содержащий три гироскопических оси - ось чистого вращения, обращенную в исходном положении фронтально к наибольшей проекции траектории слежения, ось прецессии, или ось широтного слежения, и ось нутаций, или ось меридионального слежения, которая перпендикулярна оси чистого вращения, - а также четвертую ось - наклонения нормали, проходящей через осевой механизированный инструмент перпендикулярно к касательным изгибов отслеживаемой траектории точек обработки изделия произвольной кривизны, причем каждая ось - с самостоятельным поворотным приводом и тормозным устройством, с угловыми и фазовыми датчиками угла поворота, задаваемого тактильными щупами, расположенными спереди и сзади механизированного инструмента вдоль хода слежения, а также с возможностью изменения положения оси прецессии с вертикального на горизонтальное, когда ось чистого вращения фронтально обращена к горизонтальной наибольшей проекции траектории слежения, снабжен статором и ротором, опирающимся сателлитами на статорное гироскопическое кольцо и валом на подшипниковый узел статорной крышки, скрепленной со статорным кольцом стяжками, причем ось ротора совмещена с гироскопической осью чистого вращения и перпендикулярна оси наклонения нормали к касательным изгибов изделия, проведенной через центр водила с вмонтированным в него механизированным инструментом и с сателлитами второго гироскопического кольца, диаметрально жестко присоединенного к оси ротора; на статорных стяжках жестко закреплен балансировочный хомут с возможностью регулировочного сдвига оси нутаций к центру масс, смонтированных на роторе и статоре, а ось нутаций, разделенная на полуоси, закрепленные в балансировочном хомуте, введена в подшипниковые узлы карданной вилки оси прецессий; снабжен проушиной для поворота отдельным приводом вокруг оси нутаций карданной вилки осью прецессий в горизонтальное положение до упора в поперечину рамки манипулятора, когда ось чистого вращения фронтально обращена к горизонтальной наибольшей проекции траектории слежения, причем рамка манипулятора и проушина посажены свободно на отдельные пальцы, являющиеся в начальном положении продолжением оси нутаций; второе гироскопическое кольцо выполнено в виде двух параллельных сменных кольцевых секторов, обнимаемых встречно с внутреннего и внешнего радиусов сателлитами, водилом которых образована маятниковая тележка с механизированным инструментом, содержащим силовой агрегат, причем центры кольцевых секторов расположены на перпендикуляре, восстановленном от точки контакта конца механизированного инструмента с изделием и являющемся продолжением образующей его изгиба; к силовому агрегату механизированного инструмента, содержащему пневмопривод, сжатый воздух, отредуцированный на требуемое давление, подведен от ресивера, сблокированного с редукционным клапаном и расположенного на балансировочном хомуте, а к точкам смазки кинематических пар и для компенсации утечек из гидроагрегатов поворотных приводов и механизированного инструмента гидрожидкость подана от пневмошприца, закрепленного в статоре как стяжка.
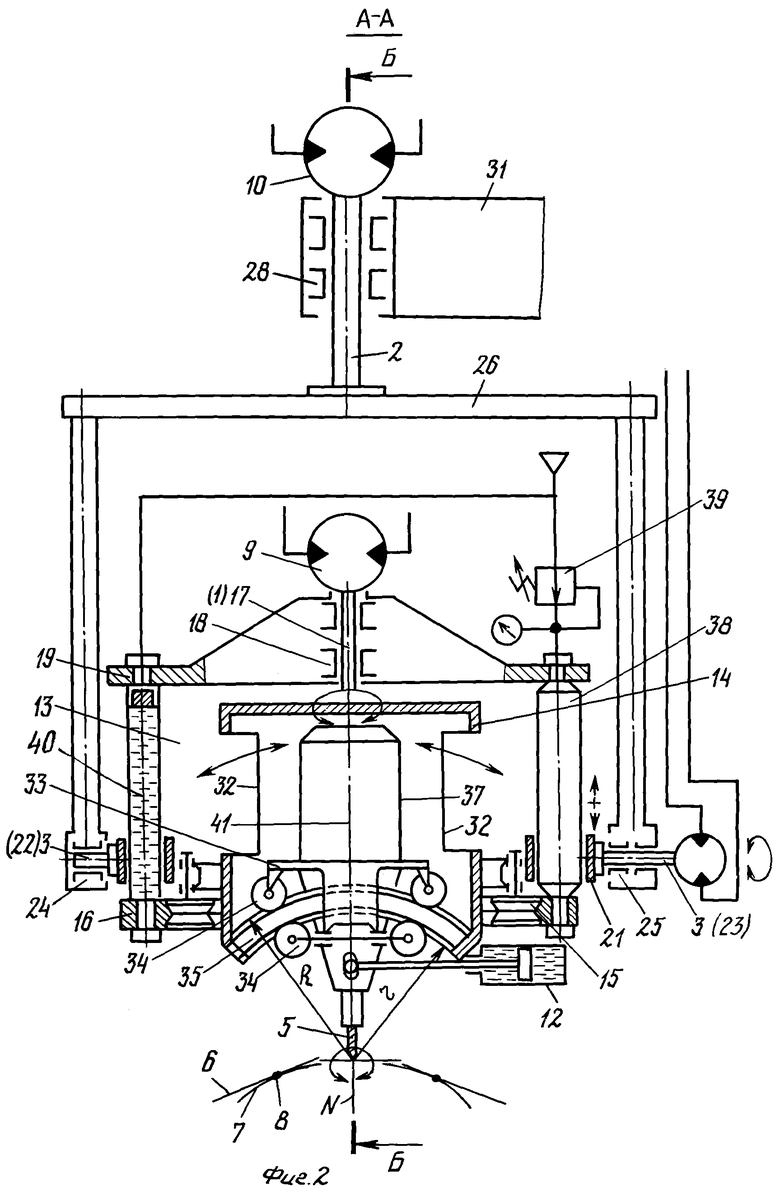
На фиг. 1 показан вид на торец ротора гироскопа с горизонтальной осью чистого вращения.
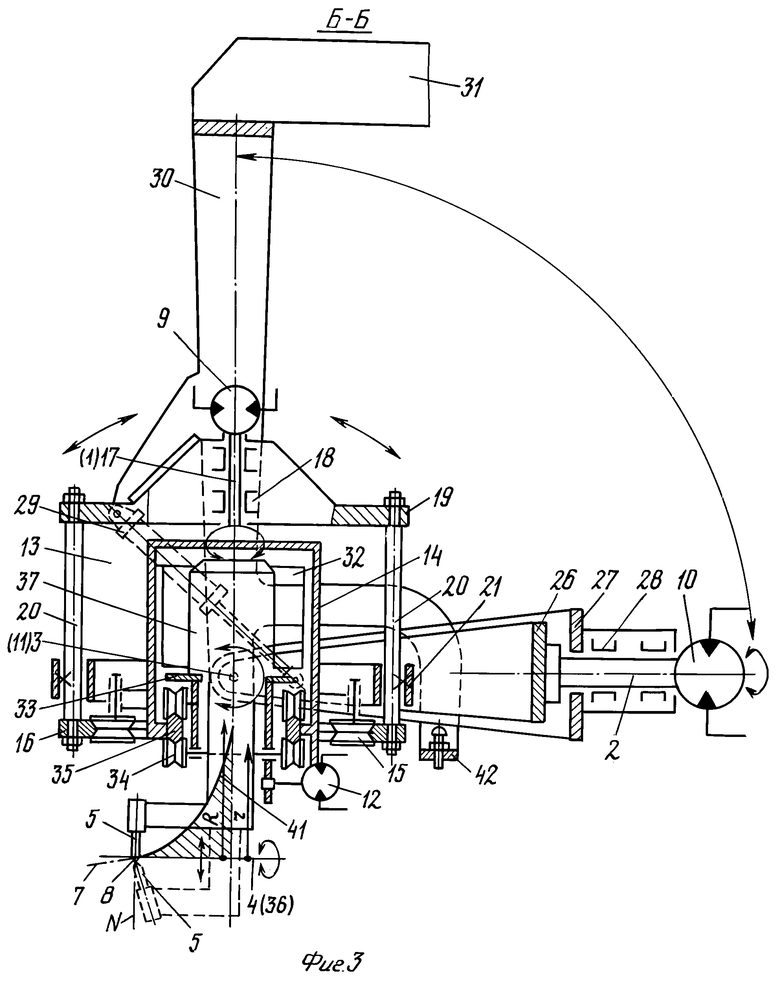
На фиг. 2 приведена кинематическая схема гироскопа в виде разреза А-А фиг.1.
На фиг.3 показан гироскоп с вертикальным положением оси чистого вращения (разрез Б-Б фиг.2).
Гироскоп выполнен в виде кинематической четырехосной системы, состоящей из оси 1 чистого вращения, оси 2 прецессий, оси 3 нутаций и оси 4 наклонения нормали N, проходящей через осевой механизированный технологический инструмент 5 (это, например, может быть сверлильная головка, заклепочник..., могут быть сварочные клещи для точечной сварки, одна клещевина которых с электродом в качестве осевого инструмента показана пунктирными линиями на фиг.3) и перпендикулярной к касательным 6 кривизны изделия 7 в точках 8 его обработки (фиг. 2). Каждая ось снабжена самостоятельным приводом с тормозным устройством: 9 - на оси 1 чистого вращения, 10 - на оси 2 прецессий, 11 - на оси 3 нутаций и 12 - на оси 4 наклонения нормали N. Гироскоп снабжен статором 13 и ротором 14, опирающимся сателлитами 15 на статорное кольцо 16 и валом 17 на подшипниковый узел 18 статорной крышки 19, скрепленной со статорным кольцом 16 стяжками 20. На статорных стяжках жестко закреплен балансировочный хомут 21, из которого выведены две полуоси 22 и 23 оси 3 нутаций, опирающиеся на подшипниковые узлы 24 и 25 карданной вилки 26 оси 2 прецессий, вилка 26 вставлена в проушину 27 с подшипниковым узлом 28 оси 2. Проушина 27 качающимся цилиндром 29 способна к автоматическому изменению положения оси 2 прецессии с вертикального на горизонтальное (фиг.3), причем шарнир качающегося цилиндра 29 закреплен на рамке 30, расположенной на манипуляторе 31. Рамка 30 и проушина 27 посажены свободно на отдельные пальцы, являющиеся в начальном положении продолжением оси 3, но не препятствующие следящему манипулированию ею приводом 10.
Внутри ротора 14 с окнами 32 (фиг.2 и 3) помещена маятниковая тележка 33 в роли водила сателлитов 34, обнимающих встречно два сменных параллельных кольцевых сектора 35 с внутреннего "r" и внешнего "R" радиусов, центры которых расположены на перпендикуляре 36, восстановленном от конца инструмента 5 и являющемся продолжением образующей изгиба изделия 7 в точке 8 (фиг.2 и 3). На маятниковой тележке 33 смонтирован блок 37 силового агрегата механизированного инструмента 5 (например, если механизированным инструментом являются сварочные клещи, то блок 37 - это малогабаритный сварочный трансформатор, электрически присоединенный к клещевинам, и пневмо- или гидропривод сжатия электродов). К пневмоприводу сжатый воздух, отредуцированный на требуемое давление, подведен от ресивера 38, сблокированного с редукционным клапаном 39 и расположенного на балансировочном хомуте 21, а к точкам смазки кинематических пар и для компенсации утечек из гидроагрегатов поворотных приводов и механизированного инструмента гидрожидкость подана от пневмошприца 40, закрепленного в статоре 13 как стяжка 20. Пневмо- и гидрораспределители переключения ходов поворотных приводов и механизированного инструмента расположены в непосредственной близости от потребителей сжатого воздуха и гидравлической энергии.
Гироскоп адаптивного робота работает следующим образом.
При поступательном движении главной гироскопической оси 1 чистого вращения вдоль траектории точек 8 на фронтальной поверхности слежения возникают "возмущения" широтного и меридионального характера. Траектория то поднимается, то опускается. Изменение кривизны изделия 7 приводит к иному наклонению касательной 6. От тактильного щупа (не показан), идущего во время подачи впереди инструмента 5, через логический блок управления робота проходит команда, например, приводу 12 на наклон нормали N осью 4. Тележка 33 на сателлитах 34 поворачивается как маятник по сменным кольцевым секторам 35 вместе с блоком 37 силового агрегата механизированного инструмента 5, восстанавливая осью 4 прямой угол между нормалью N и касательной 6. Это происходит, пока конец инструмента 5 как подвес маятника не достигнет следующей точки 8 траектории обработки изделия 7 (фиг.2), ликвидируя "возмущение". Логический блок управления, восстанавливая нормальное положение инструмента 5 к новой касательной кривизны изделия, одновременно следит за тем, чтобы ось 1 чистого вращения поступательно вернулась в плоскость заштрихованного угольника (фиг. 3), образованного осью 41 блока 37 и осью 4, т.е. вдогонку за наклоном нормали N. Такие догоняющие поступательные перемещения оси 1 вслед за следящим наклоном нормали N необходимы для того, чтобы подготовиться к переходу от широтного слежения к широтно-меридиональному (наклонному) и далее от чисто меридионального слежения к меридионально-широтному, а затем вновь к чисто широтному слежению, что и выполняет привод 9 оси 1 чистого вращения без потери нормального положения инструмента 5 относительно изгиба траектории слежения "на ребро". При этом происходит смена характера слежения то приводом 11 нутаций меридионально, то приводом 10 прецессий широтно с периодическими маятниковыми положительными и отрицательными амплитудами качания тележки 33 в пределах торцов дуги сменных кольцевых секторов 35, длина которой рассчитана заранее по максимальным амплитудам нутаций и прецессий, известных из чертежа изделия, чтобы избежать соприкосновений вершинного габарита блока силового агрегата с внутренней поверхностью статора 13 через окна 32 ротора 14. При необходимости стяжки 20 могут образовывать коническое внутреннее пространство статора 13.
Так происходит работа гироскопа, когда ось 1 чистого вращения расположена горизонтально, т.е. фронтально обращена к одной из двух вертикальных плоскостей декартова пространства.
Когда ось 1 чистого вращения в исходном положении вертикальна, т.е. фронтально обращена к горизонтальной плоскости декартова пространства, утрачивается возможность делать догоняющие поступательные перемещения оси 1 приводом 10 вслед за уходящей осью 41 тележки 33 для слежения за псевдоширотными изгибами траектории (фиг.2), наибольшая проекция которой горизонтальна. Для этого случая необходимо вертикальную ось 2 с приводом 10 положить горизонтально.
Для автоматизации изменения положения оси 1 прецессий с вертикального на горизонтальное цилиндр 29 опускает проушину 27 в горизонтальное положение, а с ней и карданную вилку 26 вокруг оси 3 (фиг.3) до упора в горизонтальную поперечину 42 рамки 30 манипулятора 31.
Теперь появляется возможность вслед за уклоняющимся от оси 1, как маятник, угольником, образованным осью 4 и осью 41, сделать догоняющий наклон оси 3 приводом 10. К моменту плоского поворота траектории слежения "на ребро" ось 1 совпадает с осью 41, и чистое вращение гироскопа происходит без потери чувствительности тактильных щупов.
С целью компенсации потерь времени на вероятностные холостые ходы при отработке "возмущений" пневмо- и гидрораспределители (не показаны) расположены в непосредственной близости от потребителей сжатого воздуха и гидроэнергии в гироскопе, чтобы приводы работали с максимально возможной быстротой.
Изобретение относится к гироскопу адаптивного робота. Гироскоп адаптивного робота, встроенный в его манипулятор, содержит три гироскопических оси - ось чистого вращения, обращенную в исходном положении фронтально к наибольшей проекции траектории слежения, ось прецессий широтного слежения и ось нутаций меридионального слежения, которая перпендикулярна оси чистого вращения, а также четвертую ось наклонения нормали, проходящей через осевой механизированный инструмент перпендикулярно к касательным изгибов отслеживаемой траектории точек обработки изделия произвольной кривизны. Причем каждая ось - с самостоятельным поворотным приводом и тормозным устройством, с угловыми и фазовыми датчиками угла поворота, задаваемыми тактильными щупами, расположенными спереди и сзади механизированного инструмента вдоль хода слежения, а также с возможностью изменения положения оси прецессий с вертикального на горизонтальное, когда ось чистого вращения фронтально обращена к горизонтальной наибольшей проекции траектории слежения. Гироскоп снабжен статором и ротором, опирающимся сателлитами на статорное гироскопическое кольцо и валом на подшипниковый узел статорной крышки, скрепленной со статорным гироскопическим кольцом стяжками. Причем ось ротора совмещена с гироскопической осью чистого вращения и перпендикулярна оси наклонения нормали к касательным изгибов изделия, проведенной через центр водила с вмонтированным в него механизированным инструментом и с сателлитами второго гироскопического кольца, диаметрально жестко присоединенного к оси ротора. Изобретение позволит автоматически удерживать нормаль, чем гарантируется качество обработки. 4 з.п.ф-лы, 3 ил.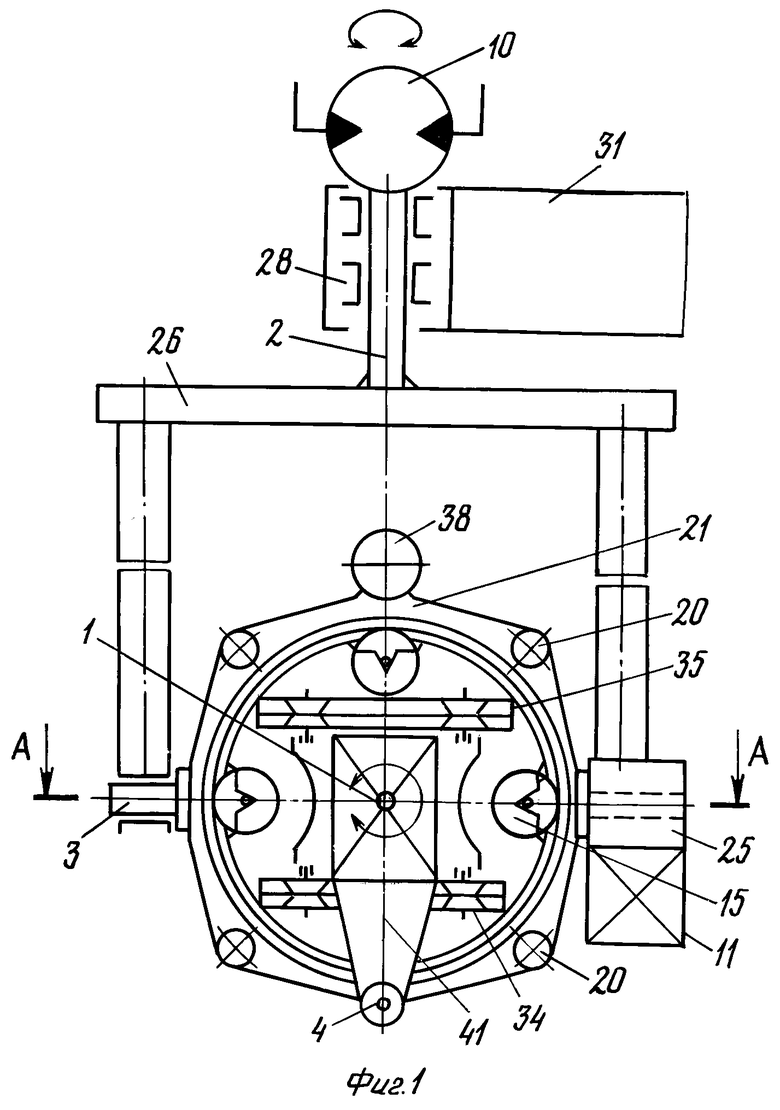
| Пневмогидравлический робот | 1974 |
|
SU574292A1 |
| SU 946337 A1, 20.09.1999 | |||
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |

