1
Изобретение относится к области систем автоматического регулирования с нелинейными корректирующими устройствами.
Для стабилизации систем автоматического регулирования находят применение нелинейные корректирующие устройства с петлевыми фазоопережающими характеристиками.
Известный способ получения петлевой характеристики по основному авт. св. 328422 заключается в том, что запоминают максимальную величину нарастающего входного сигнала, фиксируют максимальное значение разности запомненным сигналом и убывающим входным, запоминают минимальное значение убывающего входного сигнала, фиксируют максимальное значение разности между нарастающим входным сигналом и запомненным минимумом убывающего входного сигнала, которую запоминают и используют в клчестве выходного сигнала, далее снова запоминают максимальное значение нарастающего входного сигнала и таким же образом последотельно формируют разность сигналов и выходной сигнал до затухания процесса.
При известном способе наблюдается запаздывание в формировании управляющего вы-, ходного сигнала в момент включения системы и при переходе системы из одного установившегося состояния в другое при воздействии на нее случайных возмущений.
Предлагаемый способ отличается тем, что в момент появления положительного значения разности между текущим значением входного сигнала и запомненным максимальным значением входного сигнала формируют дополнительный сигнал как разность между текущим значением нарастающего входного сигнала и запомнеппым макспмальным его значением и суммируют дополнительный сигна лс выходным сигналом до момента прекращения нарастания входного сигнала.
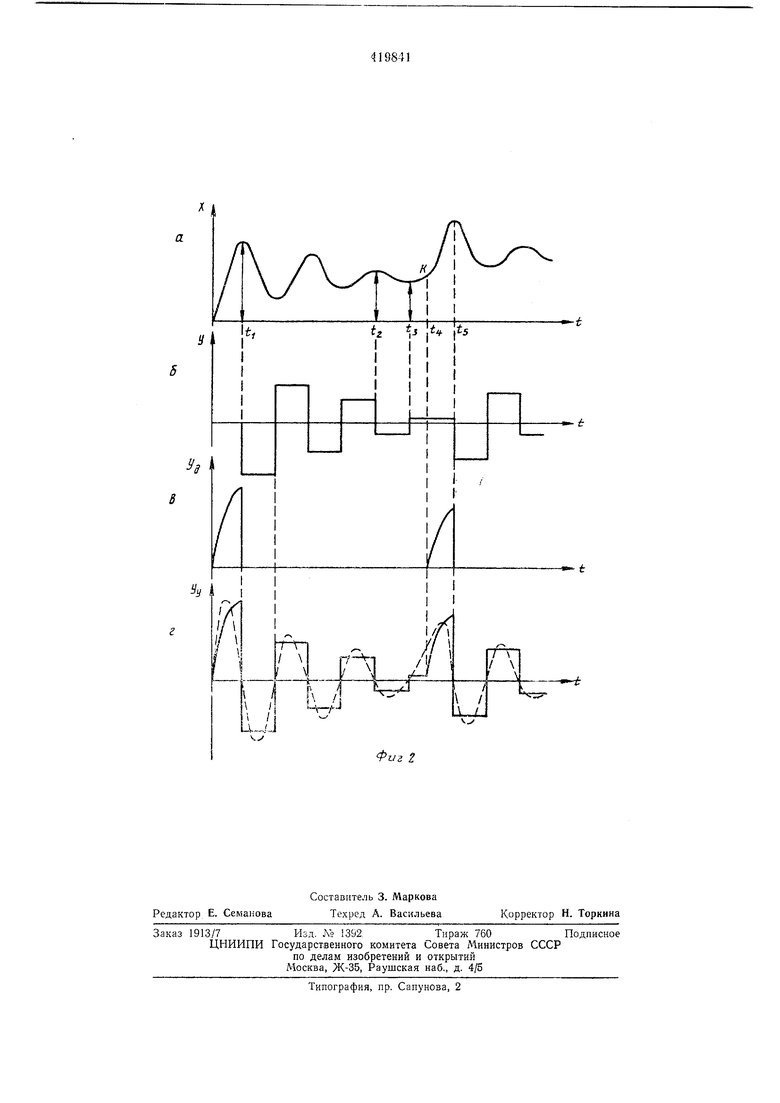
На фиг. 1 представлен график, поясняющий принцип формирования опережающей нетлевой характеристики, на фиг. 2 - график, поясняющий принцип формирования донолнительного управляющего сигнала, устраняющего запаздывание.
В предлагаемом способе формирование петлевой опережающей характеристики производится в соответствии с нелинейной функцией
Г„ /С (э, п-1 - Х,,„) sign Х„, (1),
где УП - ордината выходного сигнала на интервале времени от tn до «+1 между
соседними экстремумами входного сигнала Л;
, )i; 0, п-1-экстре.мальные значения входноного сигнала, которым соответствуют моменты времени tn и An - производная от входного сигнала на интервале времени от tn до прохождении несимметричного незатухающего гармонического сигнала )+a-Sinft)f формула (1) принимает следующий вид ,,(2) Как следует из выражения (2) ширина опережающей петли , не зависит от постоянной составляющей и определяется полностью величиной амплитуды синусоидальной составляющей входного сигнала. При этом гармонические коэффиниенты усиления нелинейного звена определяются следующими выражениями / (х) sin О q (x)-cos ita JIT Из формулы (3) следует, что коэффицие1 т усиления нелинейного звена по первой гармонике составляет /С„ Y(qr + q а фазовый сдвигпервой гармоники выходного сигнала по отношению к синусоидальному входному сигналу равен 90°, так как Р„ ZZ arctg 90. Таким образом, рассматриваемое нелинейное звено вносит в систему регулирования положительный сдвиг по фазе, равиый 90°. Причем оперел ение по фазе фн и коэффициент усиления /Сн не зависят ни от постояпной составляющей входного сигнала, ни от его амнлитуды и частоты. Прохождение затухающей несн.мметричной гармоиики через звено, реализующее функцию (1), иллюстрируется графиком, представленным на фиг. 1. Возникновение запаздывания при формировании фазоонережающего сигнала и принцин создания дополнительного сигнала, устраняющего данное запаздывание, иллюстрируется графиками, представленными на фиг. 2 а-г. На фиг. 2а показан сигнал X(t, поступающий на вход устройства с нетлевой фазоопережающей характеристикой при переходе системы автоматического регулирования из одного установившегося состояния в другое. На фиг. 2г показан фазоопережающий сигнал У(), сформированный в соответствии со способом, изложенным в основном авт. св. 328422. Сигнал X(t) формируется на основе последовательной фиксации и запоминания максимальных и минимальных значений X.(t). При этом амплитуда У() пропорциональна разноСТИ предшествующих значении максимума и минимума X{t). Из графика Y(t) на фиг. 2г видно, что в течение первой четверти волны входного сигнала, возникающей при переходе системы из одного состояния в другое, т. е. на отрезках времени (О-ti) и (), имеет место запаздывание в формировании фазоопережающего сигнала Y(t). В результате в системе автоматического регулирования, снабженной подобным корректирующим устройством, отсутствует демпфирование на отрезке времени (О-ti) или будег слабое демпфирование на отрезке времени (4-4). Для комненсации указанного запаздывания предлагается сформировать дополнительный сигнал Yj(t) па отрезках времени, в течение которых наблюдается запаздывания. При этом результирующий управляющий выходной сигнал Yy(t) получается путем суммирования сигналов Y{t) и Y-i(t). Условие включения дополнительного сигнала отражает момент перехода входного сигнала X(i) от затухающих синусоидальных колебаний к возрастающим. В предлагаемом способе момент включения дополнительного сигнала определяется как момент появления положительного значения разности между текущим значением входного сигнала X(t) и запомненным максимальным значением входного сигнала Аймаке или момент появления отрицательного значения разности между текущим значением входного сигнала и минимальным запомненным значением входного сигнаЛ а л мил. Текущее значение дополнительного сигнала Уд() пропорционально разности между текущим значением входного сигнала и максимальным запомненным сигналом при выполнении первого условия включения дополпительиого сигнала или же разности между текущим значением входного сигнала и минимальным запомненным значением входного сигиала нри вынолнении второго условия: X(f) .5Г„акс1 при X (t) - Z,,,, О К X (t) Х,,„ при X (() - Х,, О, где /С- постоянный коэффициент. На графике фиг. 2 дополнительный сигнал формируется на отрезках времени () и (t,-t,). На отрезке времени (О-ti) максимальный входной сигнал, который фиксируется и запоминается, нринимает значение О в интервале времени и X(ti) в момент ti. Следовательно, на отрезке времени выполяется условие включения дополнительного сигнала, а его величина равна Y(,} KX(t). налогично, па отрезке времени таке выполняется условие включения дополнительного сигнала, так как -(4)
„акс(
При этом на отрезке времени величина дополнительного сигнала равна
Y,(i,,(t)-x(f,).
На фиг. 2г сплошной линией показан результирующий управляющий сигнал Y,-{t)
Y,(t)Y(f)+Y,(t),
а пунктиром - первая гармоника Уу(0- Можно видеть, что по форме сигнала первая гармоника Fy(0 близка к производной от X(t) и не имеет запаздывания.
Предмет изобретения
Способ получения петлевой характеристики по основному авт. св. 328422, о т л и ч а ю щ и йс я тем, что, с целью устранения запаздывания при воздействии случайных возмущений, в момент появления положительного значения разности между текущим значением входного сигнала и запомненным максимальны.м значением входного сигнала формируют дополнительный сигнал как разность между текущим значением нарастающего входного сигнала и запомненным максимальным его значением н суммируют дополнительный сигнал с выходиым сигналом до момента прекращения нарастания входного сигнала.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТОЛЩИНЫ ПРОКАТЫВАЕМОЙ ПОЛОСЫ | 1973 |
|
SU364368A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ СИГНАЛОВ МНОГОВХОДОВОЙ СИСТЕМЫ | 2019 |
|
RU2711472C1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| СПОСОБ ПОИСКА МИНИМУМА | 1973 |
|
SU408272A1 |
| ГЕНЕРАТОР ЭЛЕКТРИЧЕСКИХ ФЛЮКТУАЦИИ | 1972 |
|
SU346777A1 |
| Способ управления процессом выращивания монокристаллов под защитной жидкостью методом Чохральского и устройство для его осуществления | 1988 |
|
SU1745780A1 |
| ИЗМЕРИТЕЛЬ ГРУППОВОГО ВРЕМЕНИ ЗАПАЗДЫВАНИЯ | 2003 |
|
RU2255343C2 |
| Аналоговое запоминающее устройство | 1975 |
|
SU591963A1 |
| УСТРОЙСТВО ДЛЯ СТАТИСТИЧЕСКОЙ ОБРАБОТКИ ИНФОРМАЦИИ | 1972 |
|
SU357565A1 |
- tt
ФигЛ
УУ «
и
ч
Фиг Z
